Anda mungkin juga menyukai
- Swing Motion Power Geneartion ReportDokumen26 halamanSwing Motion Power Geneartion ReportTanvi KhuranaBelum ada peringkat
- Millionaire Next Door QuestionsDokumen7 halamanMillionaire Next Door Questionsapi-360370073Belum ada peringkat
- Design and Fabrication Power Generation Using Speed BreakerDokumen25 halamanDesign and Fabrication Power Generation Using Speed BreakerAabal Sylo100% (1)
- Power Generation Through Suspension SystemDokumen12 halamanPower Generation Through Suspension SystemRaja Sahu100% (2)
- Power Generation From Railway TrackDokumen42 halamanPower Generation From Railway TrackRitesh Khatua100% (3)
- A ProjectDokumen9 halamanA Projectjnanesh tk100% (1)
- Mini Belt GrinderDokumen20 halamanMini Belt GrinderVenky100% (2)
- Solar Cars - The ReportDokumen26 halamanSolar Cars - The ReportAnkit Gangwar50% (2)
- Final Report Solar Grass CutterDokumen35 halamanFinal Report Solar Grass CutterGopu0% (1)
- Bicycle Water Purifier Project ReportDokumen34 halamanBicycle Water Purifier Project ReportPawan mehta70% (10)
- Six Weeks Training ReportDokumen63 halamanSix Weeks Training ReportAjay Verma83% (6)
- Pedal Operated Centrifugal Water PumpDokumen19 halamanPedal Operated Centrifugal Water PumpNeelmani100% (3)
- Visvesvaraya Technological University,: "Solar Power Seed Sprayer Machine"Dokumen13 halamanVisvesvaraya Technological University,: "Solar Power Seed Sprayer Machine"Pavan aradhya100% (1)
- Project Report On Analysis of Propeller ShaftDokumen24 halamanProject Report On Analysis of Propeller ShaftGurpreet Singh50% (8)
- Minor Project Report MechanicalDokumen26 halamanMinor Project Report MechanicalVaibhav Soni82% (28)
- Project Report PDFDokumen39 halamanProject Report PDFTejas Inamdar67% (3)
- Multipurpose Mechanical Machine Project ReportDokumen25 halamanMultipurpose Mechanical Machine Project ReportAnonymous K3eHpXfsh83% (52)
- FABRICATION OF GRASS CUTTING MACHINE Report (C) (20-03-18)Dokumen53 halamanFABRICATION OF GRASS CUTTING MACHINE Report (C) (20-03-18)sabareesh91mechBelum ada peringkat
- 02-03-2013 Design and Fabrication of Solar Seed SprayerDokumen23 halaman02-03-2013 Design and Fabrication of Solar Seed Sprayerdeenurathor100% (3)
- Multi Purpose Agriculture MachineDokumen22 halamanMulti Purpose Agriculture MachineSubbu Varma100% (3)
- Grass CutterDokumen12 halamanGrass CutterDEEPAK CBelum ada peringkat
- (02-03-2013) Design and Fabrication of Solar Seed SprayerDokumen25 halaman(02-03-2013) Design and Fabrication of Solar Seed Sprayerrrameshsmit0% (1)
- Automatic Brake Failure IndicatorDokumen30 halamanAutomatic Brake Failure IndicatorIrsHad Du XeBelum ada peringkat
- Quick Lifting Jack - Project ReportDokumen36 halamanQuick Lifting Jack - Project ReportRoyalAryans76% (17)
- A Major ProjectDokumen27 halamanA Major ProjectJanak KishorBelum ada peringkat
- Automatic Multi Purpose Agricultural Machine Using Solar EnergyDokumen8 halamanAutomatic Multi Purpose Agricultural Machine Using Solar EnergyMechWindNaniBelum ada peringkat
- Final Report Solar Grass CutterDokumen35 halamanFinal Report Solar Grass CutterHARSHAD PATEL70% (43)
- Work Report On Automated Hydraulic Jack SystemDokumen20 halamanWork Report On Automated Hydraulic Jack Systemcoolrohitkumar666100% (2)
- Scotch Yoke MechanismDokumen37 halamanScotch Yoke MechanismSaravanan Viswakarma100% (1)
- Power Generation Through Speed BreakersDokumen22 halamanPower Generation Through Speed BreakersSaikumar MysaBelum ada peringkat
- Project Report On Regenerative Shock AbsorberDokumen24 halamanProject Report On Regenerative Shock AbsorberTheVagabond Harshal33% (3)
- Sand Slinger MC Pneumatic 2016 VeltechDokumen47 halamanSand Slinger MC Pneumatic 2016 VeltechChockalingam AthilingamBelum ada peringkat
- Automatic Drainage Cleaning System Project ReportDokumen3 halamanAutomatic Drainage Cleaning System Project ReportGopal BunkarBelum ada peringkat
- Design and Fabrication of Multi-Purpose Sieving MachineDokumen6 halamanDesign and Fabrication of Multi-Purpose Sieving MachineMICHEL RAJ MechBelum ada peringkat
- Multi Agri Cutter - AbstractDokumen4 halamanMulti Agri Cutter - AbstractShankar G75% (4)
- Report On Stair Climbing TrolleyDokumen13 halamanReport On Stair Climbing TrolleyTanvi100% (1)
- Project Report On Pedal Operated Hack Saw MachineDokumen42 halamanProject Report On Pedal Operated Hack Saw MachineNishithBelum ada peringkat
- 90 Degree Turning Motorized Steering MechanismDokumen62 halaman90 Degree Turning Motorized Steering MechanismMani Kandan100% (1)
- Ashu Project PPT Mid-2Dokumen17 halamanAshu Project PPT Mid-218E3457 Mukundini67% (3)
- Design and Fabrication of Multipurpose Agriculture Aided VehicleDokumen13 halamanDesign and Fabrication of Multipurpose Agriculture Aided VehicleSHARATHKUMAR MBelum ada peringkat
- A Project Report On AutoclutchDokumen56 halamanA Project Report On AutoclutchIpaseta Dhara33% (6)
- Pedal Operated Water Pumping SystemDokumen33 halamanPedal Operated Water Pumping Systemchristin9193% (15)
- Power Generating Shock Absorber Seminar FinalDokumen28 halamanPower Generating Shock Absorber Seminar FinalMoh'd Safvan67% (6)
- 6.fabrication of Pedal Operating Podride CarDokumen2 halaman6.fabrication of Pedal Operating Podride CarsathishBelum ada peringkat
- Electricity Generation From See SawDokumen11 halamanElectricity Generation From See SawLikepageLikeit50% (2)
- Power Generation From Speed BreakerDokumen50 halamanPower Generation From Speed BreakerRANEEV K100% (2)
- Seminar Report On Fuel From Plastic WasteDokumen32 halamanSeminar Report On Fuel From Plastic WasteAnonymous kTmfG2Ax0% (1)
- Pneumatic JackDokumen35 halamanPneumatic JackVignesh viki100% (1)
- Shaper Machine SeminrDokumen20 halamanShaper Machine SeminrSoumya Banerjee80% (5)
- Seed Sowing Machine Project ReportDokumen14 halamanSeed Sowing Machine Project ReportMantha BalajiBelum ada peringkat
- Report Wheel Chair Cum StretcherDokumen44 halamanReport Wheel Chair Cum StretcherTanvi Khurana50% (2)
- Intelligent Braking System - SynopsisDokumen6 halamanIntelligent Braking System - SynopsisTanviBelum ada peringkat
- Automatic Bike Stand ReportDokumen50 halamanAutomatic Bike Stand ReportSagar Tikone50% (2)
- B18me080, 83, 84 Mini Project ReportDokumen26 halamanB18me080, 83, 84 Mini Project ReportPavan RajBelum ada peringkat
- B.Tech: Design and Fabrication of Medium Thickness Composite CutterDokumen32 halamanB.Tech: Design and Fabrication of Medium Thickness Composite CutterVivek PandeyBelum ada peringkat
- Final Year Project IntroductionDokumen10 halamanFinal Year Project IntroductionsudhakarBelum ada peringkat
- Group 11Dokumen38 halamanGroup 11Devendra Pratap SinghBelum ada peringkat
- Battery Operated LawnmowerDokumen51 halamanBattery Operated LawnmowerMohammad ShoebBelum ada peringkat
- Gearless TransmissionDokumen37 halamanGearless TransmissionTanvi KhuranaBelum ada peringkat
- Fabrication of Lawn Mower: Bachelor of Engineering IN Mechanical EngineeringDokumen30 halamanFabrication of Lawn Mower: Bachelor of Engineering IN Mechanical Engineeringabdullah 3mar abou reashaBelum ada peringkat
- FOOT STEP POWER GENERATION New UpdateDokumen53 halamanFOOT STEP POWER GENERATION New UpdateSubham kumar SinhaBelum ada peringkat
- First PageDokumen5 halamanFirst PageRais AlamBelum ada peringkat
- A Winter Training: Project Guide: Submitted byDokumen2 halamanA Winter Training: Project Guide: Submitted byRais AlamBelum ada peringkat
- Happy Birthday: Wishing You A VeryDokumen2 halamanHappy Birthday: Wishing You A VeryRais AlamBelum ada peringkat
- Ds0 Th0 Ch0 Uxj Eqjknkckn D (Kk&8 DH MRRH - KZ NK Kvksa DH LWPH L &2018&19Dokumen2 halamanDs0 Th0 Ch0 Uxj Eqjknkckn D (Kk&8 DH MRRH - KZ NK Kvksa DH LWPH L &2018&19Rais AlamBelum ada peringkat
- A Summer Training ReportDokumen6 halamanA Summer Training ReportRais AlamBelum ada peringkat
- Medical Shop System': Bachelor of Computer ApplicationDokumen5 halamanMedical Shop System': Bachelor of Computer ApplicationRais AlamBelum ada peringkat
- Pre School: Summer Sports Camp - 2019Dokumen1 halamanPre School: Summer Sports Camp - 2019Rais AlamBelum ada peringkat
- B.tech 1Dokumen49 halamanB.tech 1Rais AlamBelum ada peringkat
- Multilayer Car Parking System: A Project Report ONDokumen1 halamanMultilayer Car Parking System: A Project Report ONRais AlamBelum ada peringkat
- Preface: MURTAZA HASAN (1501060044)Dokumen1 halamanPreface: MURTAZA HASAN (1501060044)Rais AlamBelum ada peringkat
- Chapter IDokumen11 halamanChapter IRais AlamBelum ada peringkat
- DroneDokumen56 halamanDroneRais Alam100% (1)
- PampletDokumen2 halamanPampletRais AlamBelum ada peringkat
- Question Paper PDFDokumen484 halamanQuestion Paper PDFRais AlamBelum ada peringkat
- Analysis of Compressive Strength of M-25 Grade Concrete Using Fly Ash As Partial Replacement of CementDokumen49 halamanAnalysis of Compressive Strength of M-25 Grade Concrete Using Fly Ash As Partial Replacement of CementRais AlamBelum ada peringkat
- REPORTDokumen86 halamanREPORTRais AlamBelum ada peringkat
- Globalization and EducationDokumen10 halamanGlobalization and EducationRais AlamBelum ada peringkat
- Iftm University, Moradabad: Kumari KanchanDokumen21 halamanIftm University, Moradabad: Kumari KanchanRais AlamBelum ada peringkat
- Question Paper PDFDokumen484 halamanQuestion Paper PDFRais AlamBelum ada peringkat
- Ar ExportsDokumen1 halamanAr ExportsRais AlamBelum ada peringkat
- Woman and Political Participation: Emerging Patterns: esri2011/ISSN 0975-7635Dokumen15 halamanWoman and Political Participation: Emerging Patterns: esri2011/ISSN 0975-7635Rais AlamBelum ada peringkat
- ContentsDokumen1 halamanContentsRais AlamBelum ada peringkat
- HoliDokumen2 halamanHoliRais AlamBelum ada peringkat
- Training and Development in C.L. Gupta Export: A Project ReportDokumen5 halamanTraining and Development in C.L. Gupta Export: A Project ReportRais AlamBelum ada peringkat
- M.Ed. Topic ListDokumen2 halamanM.Ed. Topic ListRais AlamBelum ada peringkat
- Floor Paln ModelDokumen15 halamanFloor Paln ModelSaurav RanjanBelum ada peringkat
- Kompetensi Sumber Daya Manusia SDM Dalam Meningkatkan Kinerja Tenaga Kependidika PDFDokumen13 halamanKompetensi Sumber Daya Manusia SDM Dalam Meningkatkan Kinerja Tenaga Kependidika PDFEka IdrisBelum ada peringkat
- Accounting II SyllabusDokumen4 halamanAccounting II SyllabusRyan Busch100% (2)
- Quantity DiscountDokumen22 halamanQuantity Discountkevin royBelum ada peringkat
- Engagement Letter TrustDokumen4 halamanEngagement Letter Trustxetay24207Belum ada peringkat
- Sealant Solutions: Nitoseal Thioflex FlamexDokumen16 halamanSealant Solutions: Nitoseal Thioflex FlamexBhagwat PatilBelum ada peringkat
- Bank of AmericaDokumen1 halamanBank of AmericaBethany MangahasBelum ada peringkat
- Political Positions of Pete ButtigiegDokumen12 halamanPolitical Positions of Pete ButtigiegFuzz FuzzBelum ada peringkat
- Scope: Provisional Method - 1994 © 1984 TAPPIDokumen3 halamanScope: Provisional Method - 1994 © 1984 TAPPIМаркус СилваBelum ada peringkat
- Tendernotice 1Dokumen42 halamanTendernotice 1Hanu MittalBelum ada peringkat
- Fundamental RightsDokumen55 halamanFundamental RightsDivanshuSharmaBelum ada peringkat
- GATE General Aptitude GA Syllabus Common To AllDokumen2 halamanGATE General Aptitude GA Syllabus Common To AllAbiramiAbiBelum ada peringkat
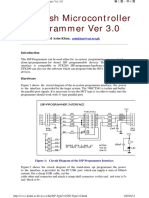
- ISP Flash Microcontroller Programmer Ver 3.0: M Asim KhanDokumen4 halamanISP Flash Microcontroller Programmer Ver 3.0: M Asim KhanSrđan PavićBelum ada peringkat
- Elliot WaveDokumen11 halamanElliot WavevikramBelum ada peringkat
- CSA Report Fahim Final-1Dokumen10 halamanCSA Report Fahim Final-1Engr Fahimuddin QureshiBelum ada peringkat
- 87 - Case Study On Multicomponent Distillation and Distillation Column SequencingDokumen15 halaman87 - Case Study On Multicomponent Distillation and Distillation Column SequencingFranklin Santiago Suclla Podesta50% (2)
- We Move You. With Passion.: YachtDokumen27 halamanWe Move You. With Passion.: YachthatelBelum ada peringkat
- QCM Part 145 en Rev17 310818 PDFDokumen164 halamanQCM Part 145 en Rev17 310818 PDFsotiris100% (1)
- 1980WB58Dokumen167 halaman1980WB58AKSBelum ada peringkat
- Fr-E700 Instruction Manual (Basic)Dokumen155 halamanFr-E700 Instruction Manual (Basic)DeTiEnamoradoBelum ada peringkat
- Fracture and FatigueDokumen15 halamanFracture and FatigueZou JiaweiBelum ada peringkat
- Test Bank For American Corrections Concepts and Controversies 2nd Edition Barry A Krisberg Susan Marchionna Christopher J HartneyDokumen36 halamanTest Bank For American Corrections Concepts and Controversies 2nd Edition Barry A Krisberg Susan Marchionna Christopher J Hartneyvaultedsacristya7a11100% (30)
- Careem STRATEGIC MANAGEMENT FINAL TERM REPORTDokumen40 halamanCareem STRATEGIC MANAGEMENT FINAL TERM REPORTFahim QaiserBelum ada peringkat
- WhatsApp Chat With JioCareDokumen97 halamanWhatsApp Chat With JioCareYásh GúptàBelum ada peringkat
- Windsor Machines LimitedDokumen12 halamanWindsor Machines LimitedAlaina LongBelum ada peringkat
- Safety Data Sheet: Fumaric AcidDokumen9 halamanSafety Data Sheet: Fumaric AcidStephen StantonBelum ada peringkat
- Supreme Court of The United StatesDokumen296 halamanSupreme Court of The United StatesABC News PoliticsBelum ada peringkat
- Delta PresentationDokumen36 halamanDelta Presentationarch_ianBelum ada peringkat
- Nisha Rough DraftDokumen50 halamanNisha Rough DraftbharthanBelum ada peringkat