Anda mungkin juga menyukai
- Cryogenic Liquid Manifolds: Applications GuideDokumen34 halamanCryogenic Liquid Manifolds: Applications GuideKadiri OlanrewajuBelum ada peringkat
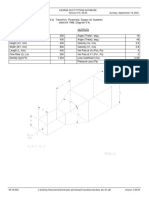
- (SR4-2) Transition, Pyramidal, Supply Air Systems (Idelchik 1986, Diagram 5-4) Inputs OutputsDokumen20 halaman(SR4-2) Transition, Pyramidal, Supply Air Systems (Idelchik 1986, Diagram 5-4) Inputs Outputscollins014100% (1)
- Kubilay2015 PDFDokumen18 halamanKubilay2015 PDFBorisBerezovsky100% (1)
- Heat Load Estimation E20 FormDokumen1 halamanHeat Load Estimation E20 Formkahwooi88Belum ada peringkat
- Appendix 6 Fitting Loss Coefficient Tables PDFDokumen3 halamanAppendix 6 Fitting Loss Coefficient Tables PDFAshutosh Kumar DubeyBelum ada peringkat
- Dectron DSV Series CatalogDokumen4 halamanDectron DSV Series Catalogbluemojo0% (2)
- SECTION 15850 Air Outlets and Inlets Rev 0Dokumen31 halamanSECTION 15850 Air Outlets and Inlets Rev 0Munir RasheedBelum ada peringkat
- Selkirk PS/IPSDokumen8 halamanSelkirk PS/IPSMel MudhookBelum ada peringkat
- SOL Heating, Ventilating and AirDokumen375 halamanSOL Heating, Ventilating and AirMahmoud MohammedBelum ada peringkat
- Tube Size and Component Selection PDFDokumen20 halamanTube Size and Component Selection PDFLinh TruongBelum ada peringkat
- MAHU Catalogue 2015Dokumen16 halamanMAHU Catalogue 2015Ong MatBelum ada peringkat
- TAIL Index For Rating IEQ ASHRAE DEC 2019Dokumen3 halamanTAIL Index For Rating IEQ ASHRAE DEC 2019raguBelum ada peringkat
- 2018-10-30 - Eurovent - AHU Guidebook - First Edition - en - WebDokumen29 halaman2018-10-30 - Eurovent - AHU Guidebook - First Edition - en - WebLuis MiguelBelum ada peringkat
- Product Application Guide: Multiple F An Systems - F Ans in Series and ParallelDokumen4 halamanProduct Application Guide: Multiple F An Systems - F Ans in Series and ParallelgonvicBelum ada peringkat
- Labsystem Room Air Control in LaboratoriesDokumen22 halamanLabsystem Room Air Control in LaboratoriesJulio AlceramBelum ada peringkat
- H 250/M9 H 250/M7: Installation and Operating InstructionsDokumen68 halamanH 250/M9 H 250/M7: Installation and Operating InstructionsPadam tanker Singh funny videosBelum ada peringkat
- Product Data: Features/BenefitsDokumen60 halamanProduct Data: Features/BenefitsBJNE01Belum ada peringkat
- Refrigerant Safety in Hvac SystemsDokumen71 halamanRefrigerant Safety in Hvac SystemsArnob KunduBelum ada peringkat
- Fire Smoke Damper - June 2018 in PDFDokumen14 halamanFire Smoke Damper - June 2018 in PDFirfanBelum ada peringkat
- DIN 1946-4 Engl. Dez. 2008Dokumen68 halamanDIN 1946-4 Engl. Dez. 2008Lệ HoaBelum ada peringkat
- As 2254-1988 Acoustics - Recommended Noise Levels For Various Areas of Occupancy in Vessels and OffshoreDokumen5 halamanAs 2254-1988 Acoustics - Recommended Noise Levels For Various Areas of Occupancy in Vessels and OffshoreSAI Global - APACBelum ada peringkat
- Question # 01: AnswerDokumen9 halamanQuestion # 01: AnswerKhushnoodBelum ada peringkat
- Rooftop TraneDokumen108 halamanRooftop TraneJuan Andres ArenasBelum ada peringkat
- Basics of Duct DesignDokumen2 halamanBasics of Duct DesignApurv Goyal100% (1)
- Axial AXBDokumen20 halamanAxial AXBhoseyliauBelum ada peringkat
- 5HP PDFDokumen76 halaman5HP PDFeduardomanuel3Belum ada peringkat
- ACH580 Drives For HVAC Catalog 3AUA0000186691 RevEDokumen36 halamanACH580 Drives For HVAC Catalog 3AUA0000186691 RevESalaar AnsarBelum ada peringkat
- MULTI V 5 Catalog PDFDokumen34 halamanMULTI V 5 Catalog PDFquangBelum ada peringkat
- MDS Design and Installation GuideDokumen120 halamanMDS Design and Installation GuideDita Ayu Rani NBelum ada peringkat
- Non Circular Pipe FrictionDokumen3 halamanNon Circular Pipe Frictionravi_radanBelum ada peringkat
- Riesenberger J. and J. Koeller (2005) Commercial Laundry FacilitiesDokumen30 halamanRiesenberger J. and J. Koeller (2005) Commercial Laundry FacilitiesTilakjiBelum ada peringkat
- AHU-02 Submittal Saivar Rev-02Dokumen49 halamanAHU-02 Submittal Saivar Rev-02Hossam AttefBelum ada peringkat
- Cermak PHD Thesis RC041115Dokumen148 halamanCermak PHD Thesis RC041115stefanoschiavonBelum ada peringkat
- Chiller Selection & District Cooling 7Dokumen7 halamanChiller Selection & District Cooling 7Marzook50% (2)
- Lau ECatalogDokumen316 halamanLau ECatalogramadan rashadBelum ada peringkat
- Ashrae 15-34-Rev 3 MitsubishiDokumen7 halamanAshrae 15-34-Rev 3 MitsubishiJosho SandovalBelum ada peringkat
- Reducing Energy Use in The Cold Storage Industry - A Case StudyDokumen7 halamanReducing Energy Use in The Cold Storage Industry - A Case StudyPhilip MarphyBelum ada peringkat
- Mcquay": Absorption ChillerDokumen88 halamanMcquay": Absorption ChillerMuzafar Ali ShahBelum ada peringkat
- MECH4880-Assignment1 S2 2017 v1 - 01Dokumen25 halamanMECH4880-Assignment1 S2 2017 v1 - 01charitha RanwalaBelum ada peringkat
- Parking Structures Guidelines enDokumen8 halamanParking Structures Guidelines enbudi budihardjoBelum ada peringkat
- Open StudioDokumen18 halamanOpen Studiotajudeen_372461273Belum ada peringkat
- 02 Cooling Load Calculation - HAPDokumen2 halaman02 Cooling Load Calculation - HAPU DEEPAKBelum ada peringkat
- A Low-Cost, High Performance Lab HVAC DesignDokumen4 halamanA Low-Cost, High Performance Lab HVAC Designhtosar2Belum ada peringkat
- A Theoretical and Practical Guide To The Basics of Designing Air Flow SystemsDokumen3 halamanA Theoretical and Practical Guide To The Basics of Designing Air Flow Systemsmarcoo8Belum ada peringkat
- So-Pro: Solar Process HeatDokumen28 halamanSo-Pro: Solar Process Heat-roseira-Belum ada peringkat
- ManualDokumen88 halamanManualIuri Diniz100% (2)
- Heating Coil in The Main Air Handling UnitDokumen13 halamanHeating Coil in The Main Air Handling UnitApurv GoyalBelum ada peringkat
- VCD Study PDFDokumen6 halamanVCD Study PDFNay Myo OoBelum ada peringkat
- Absorption Cooling SystemDokumen7 halamanAbsorption Cooling Systemjapganzan2186100% (1)
- Bergles PublicationsDokumen40 halamanBergles PublicationsNanji HadiaBelum ada peringkat
- Dehumidification Equipment Advance ASHRAE Journal PDFDokumen6 halamanDehumidification Equipment Advance ASHRAE Journal PDFThomás ArévaloBelum ada peringkat
- SKM FCU High Static DetailDokumen28 halamanSKM FCU High Static DetailInzamamBelum ada peringkat
- Dvp-Plc-Program o en 20101119Dokumen618 halamanDvp-Plc-Program o en 20101119Mohammed MagdyBelum ada peringkat
- 2019-NuTTS Katsuno Et Al UQDPTCDokumen7 halaman2019-NuTTS Katsuno Et Al UQDPTCPrasad PatilBelum ada peringkat
- Airfoil Inverse DesignDokumen12 halamanAirfoil Inverse DesignFilip StojkovskiBelum ada peringkat
- Journal of Computational and Applied Mathematics: Yanli Zhai, Dazhi Zhang, Jiebao Sun, Boying WuDokumen8 halamanJournal of Computational and Applied Mathematics: Yanli Zhai, Dazhi Zhang, Jiebao Sun, Boying WuspavalBelum ada peringkat
- A Multiplicative Directional Distance FunctionDokumen14 halamanA Multiplicative Directional Distance FunctionPoguydfBelum ada peringkat
- Copulas & Transforms: Enkelejd HashorvaDokumen76 halamanCopulas & Transforms: Enkelejd Hashorvadavid AbotsitseBelum ada peringkat
- Project Navier StokesDokumen26 halamanProject Navier StokesYves GarnardBelum ada peringkat
- Software License Agreements: DR Eszter Telek IPR-Insights ConsultingDokumen31 halamanSoftware License Agreements: DR Eszter Telek IPR-Insights ConsultingAsh TiwariBelum ada peringkat
- Openfoam: User GuideDokumen237 halamanOpenfoam: User GuideHugo Lenin SanchezBelum ada peringkat
- Openfoam: User GuideDokumen237 halamanOpenfoam: User GuideHugo Lenin SanchezBelum ada peringkat
- Sample - If Same Lab - LMCDokumen1 halamanSample - If Same Lab - LMCLuxmiNarasimmanRBelum ada peringkat
- Signal Sampling, Quantization, Binary Encoding: Oleh Albert SagalaDokumen46 halamanSignal Sampling, Quantization, Binary Encoding: Oleh Albert SagalaRamos D HutabalianBelum ada peringkat
- An Introduction To WEKA Explorer: in Part From: Yizhou Sun 2008Dokumen104 halamanAn Introduction To WEKA Explorer: in Part From: Yizhou Sun 2008Pablo VelaBelum ada peringkat
- Semisupervised Multilabel Learning With Joint Dimensionality ReductionDokumen5 halamanSemisupervised Multilabel Learning With Joint Dimensionality ReductionDr. Chekir AmiraBelum ada peringkat
- ChapDokumen4 halamanChapPiyush Chaudhary0% (1)
- Finite Elements in Analysis and Design: Mariano Victoria, Osvaldo M. Querin, Pascual MartıDokumen9 halamanFinite Elements in Analysis and Design: Mariano Victoria, Osvaldo M. Querin, Pascual MartıNikBelum ada peringkat
- 02 UPGMA ExampleDokumen5 halaman02 UPGMA ExampleDayanandhi ElangovanBelum ada peringkat
- ds06 PDFDokumen17 halamands06 PDFKevin MondragonBelum ada peringkat
- Business Analytics & Machine Learning: Regression AnalysisDokumen58 halamanBusiness Analytics & Machine Learning: Regression AnalysisArda HüseyinoğluBelum ada peringkat
- Syllabus - App LabDokumen1 halamanSyllabus - App LabSunita MouryaBelum ada peringkat
- Economic Dispatch LectureDokumen45 halamanEconomic Dispatch LectureGaurav GargBelum ada peringkat
- All CiphersDokumen13 halamanAll CiphersKishan MishraBelum ada peringkat
- Objective: The Student Will Be Able ToDokumen18 halamanObjective: The Student Will Be Able ToJojit LEDESMABelum ada peringkat
- Hw3sol PsDokumen10 halamanHw3sol PsDenis NgureBelum ada peringkat
- RandomDokumen3 halamanRandomTechBelum ada peringkat
- Classification of Lung Cancer Detection Using Convolution Neural Network (CNN)Dokumen11 halamanClassification of Lung Cancer Detection Using Convolution Neural Network (CNN)dataprodcsBelum ada peringkat
- Activity 2.1.4 AOI Logic AnalysisDokumen6 halamanActivity 2.1.4 AOI Logic AnalysisythoBelum ada peringkat
- Lec2 17Dokumen27 halamanLec2 17RajulBelum ada peringkat
- Mai 4.9 Discrete DistributionsDokumen16 halamanMai 4.9 Discrete DistributionsAvatBelum ada peringkat
- Minimax and Near-Min-imax: University of Toronto, Canada AbstractDokumen20 halamanMinimax and Near-Min-imax: University of Toronto, Canada AbstractFlorinBelum ada peringkat
- ToleranceDokumen3 halamanToleranceprakashrs295Belum ada peringkat
- Solution Lab 1 DN2221, KTHDokumen17 halamanSolution Lab 1 DN2221, KTHleSebaBelum ada peringkat
- NIS IMP QuestionsDokumen4 halamanNIS IMP QuestionsAbhijit chavanBelum ada peringkat
- Real-Time Scheduling: Deadline Based AlgorithmsDokumen22 halamanReal-Time Scheduling: Deadline Based AlgorithmsRita ChhikaraBelum ada peringkat
- CH 30Dokumen54 halamanCH 30Sanchita KadambariBelum ada peringkat
- Exercise Am015 Topic 1 UpsDokumen3 halamanExercise Am015 Topic 1 UpsHafeszDean 860% (1)
- 15.4.5 Lab - Explore Encryption MethodsDokumen5 halaman15.4.5 Lab - Explore Encryption MethodsMoncef HassaniBelum ada peringkat
- Kearns Vairani 1994 Introduction To Computational Learning Thoery Ch01Dokumen41 halamanKearns Vairani 1994 Introduction To Computational Learning Thoery Ch01klaus peterBelum ada peringkat
- Gage R&R (ANOVA) Report For .21 - 0681 / - 0668 XDDokumen3 halamanGage R&R (ANOVA) Report For .21 - 0681 / - 0668 XDAKIN KAYODEBelum ada peringkat
- Module 3 - Cost Behavior AnalysisDokumen4 halamanModule 3 - Cost Behavior AnalysisAdrian GallardoBelum ada peringkat
- From RE To NFA and Vise VersaDokumen47 halamanFrom RE To NFA and Vise VersaMahmoud Nawwar0% (1)