Anda mungkin juga menyukai
- Clasificación de Los MicrocontroladoresDokumen4 halamanClasificación de Los MicrocontroladoresDiego Alejandro Maya80% (5)
- TDR Adquisicion Grupo Electrogeno IiDokumen26 halamanTDR Adquisicion Grupo Electrogeno IiFu LaidersBelum ada peringkat
- Modelo TIF Tecnicas de AltaDokumen9 halamanModelo TIF Tecnicas de AltaMiriam Fiorella Umasi HuamaniBelum ada peringkat
- Colaboración de ClasesDokumen28 halamanColaboración de ClasespioyutuBelum ada peringkat
- ArduinoDokumen10 halamanArduinogerson perenBelum ada peringkat
- Program, A Display 7 Segmentos CaseroDokumen8 halamanProgram, A Display 7 Segmentos Caserohelmer ruizBelum ada peringkat
- M1H 287003 281535 272016Dokumen31 halamanM1H 287003 281535 272016Matías CorvettoBelum ada peringkat
- Ejercicios ARDUINO 2Dokumen3 halamanEjercicios ARDUINO 2Eduardo NúñezBelum ada peringkat
- Ficha 3Dokumen5 halamanFicha 3roures76Belum ada peringkat
- Microcontroladores y MicroprocesadoresDokumen10 halamanMicrocontroladores y MicroprocesadoresYovany Leon florezBelum ada peringkat
- Seminario de Arduino Clase 2Dokumen22 halamanSeminario de Arduino Clase 2Francisco Javier CantoBelum ada peringkat
- Portafolio Nro 2 - Valeria HoyosDokumen12 halamanPortafolio Nro 2 - Valeria HoyosAlejandro Joaquín Bejarano RomeroBelum ada peringkat
- Utrilla Reyes James AxelDokumen13 halamanUtrilla Reyes James AxelLuis AntonioBelum ada peringkat
- Portafolio N°2Dokumen14 halamanPortafolio N°2Alejandro Joaquín Bejarano RomeroBelum ada peringkat
- Proyecto Arduino Fin de GradoDokumen13 halamanProyecto Arduino Fin de GradoPablo MartinBelum ada peringkat
- Programas ArduinoDokumen8 halamanProgramas Arduinomicha2mcBelum ada peringkat
- Programacion SumobotDokumen2 halamanProgramacion SumobotJesus Soberon0% (1)
- Arduino Control Car V2 byDokumen7 halamanArduino Control Car V2 byedithBelum ada peringkat
- Programas ArduinoDokumen15 halamanProgramas ArduinoDaniel Tenezaca BejaranoBelum ada peringkat
- Ejercicios en Arduino - Parte 2Dokumen10 halamanEjercicios en Arduino - Parte 2David GalvezBelum ada peringkat
- Arduino 2Dokumen4 halamanArduino 2Carlos BaideBelum ada peringkat
- Arduino Control Car V2 byDokumen7 halamanArduino Control Car V2 byJulio Gomez HernándezBelum ada peringkat
- Diagramas ArduinoDokumen15 halamanDiagramas ArduinoJorge Santiago Cartagena RosalesBelum ada peringkat
- Practicas Electronica DigitalDokumen23 halamanPracticas Electronica DigitalVitore MorleoneBelum ada peringkat
- Gpai2017b-p04a-Componentes Electronicos Con ArduinoDokumen52 halamanGpai2017b-p04a-Componentes Electronicos Con ArduinoAlexandra EncisoBelum ada peringkat
- Manual Tecnico IADokumen6 halamanManual Tecnico IAAxel BarahonaBelum ada peringkat
- AutorDokumen6 halamanAutordieguenskyBelum ada peringkat
- VHDL GuiaDokumen7 halamanVHDL GuiaJaime Andres Mondragon GaleanoBelum ada peringkat
- Robot + Bluetooth +infrarrojoDokumen9 halamanRobot + Bluetooth +infrarrojoBlas AdrianBelum ada peringkat
- Avance de InformeDokumen7 halamanAvance de InformeSebastian Cabello MartínezBelum ada peringkat
- IoT Semaforo PDFDokumen2 halamanIoT Semaforo PDFCentro Evolutivo Del SoftwareBelum ada peringkat
- IoT Semaforo PDFDokumen2 halamanIoT Semaforo PDFCentro Evolutivo Del SoftwareBelum ada peringkat
- Lenguaje Electronico 6° 3°Dokumen4 halamanLenguaje Electronico 6° 3°Stefani TercerosBelum ada peringkat
- CÓDIGO DISPENSADOR DE JABÓN - Ana Karen Mendoza HernandezDokumen2 halamanCÓDIGO DISPENSADOR DE JABÓN - Ana Karen Mendoza HernandezFrancisco EmilioBelum ada peringkat
- Reto 3Dokumen2 halamanReto 3victor alejandro montalvo floresBelum ada peringkat
- Proyecto Dutan ArielDokumen14 halamanProyecto Dutan ArielAriel DutanBelum ada peringkat
- E/S Digital: Pinmode (Pin, Mode)Dokumen7 halamanE/S Digital: Pinmode (Pin, Mode)banzorro9029Belum ada peringkat
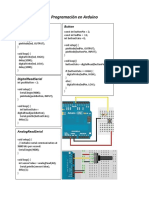
- Programación en ArduinoDokumen34 halamanProgramación en ArduinoJohn Morillo100% (1)
- Programacion Arduino Sistemas de ControlDokumen5 halamanProgramacion Arduino Sistemas de ControlTavo ReyesBelum ada peringkat
- Domótica Con Microcontroladores - 1819Dokumen12 halamanDomótica Con Microcontroladores - 1819epicseventryBelum ada peringkat
- Control de DirecciónDokumen7 halamanControl de DirecciónAbraham RodriguezBelum ada peringkat
- Leccion PracticaDokumen14 halamanLeccion PracticaSevastian HolguinBelum ada peringkat
- Álgebra de BooleDokumen29 halamanÁlgebra de BooleCamila caputoBelum ada peringkat
- CarroDokumen4 halamanCarroGir EstradaBelum ada peringkat
- Código Arduino Switch-CaseDokumen2 halamanCódigo Arduino Switch-CaseShania Vicente SánchezBelum ada peringkat
- ArduinoDokumen6 halamanArduinoantonioBelum ada peringkat
- Programacion de Perro GuardianDokumen2 halamanProgramacion de Perro GuardianJuan Enrique Fernandez ColodroBelum ada peringkat
- CosasdelpocessingDokumen6 halamanCosasdelpocessingCrystian ChavezBelum ada peringkat
- Ejemplo BàsicoDokumen8 halamanEjemplo BàsicoJosé RomeroBelum ada peringkat
- Programa 1Dokumen4 halamanPrograma 1LUIS ENRIQUE MENA MENABelum ada peringkat
- Informe Caja FuerteDokumen18 halamanInforme Caja FuerteDavid Sanchez100% (1)
- Lab 11 - ImDokumen17 halamanLab 11 - Imsandy choque matencioBelum ada peringkat
- Práctica 2 Grupo 2Dokumen7 halamanPráctica 2 Grupo 2Debbie GonzalesBelum ada peringkat
- Detector de VolcamientoDokumen1 halamanDetector de VolcamientoRicardo Mendez VargasBelum ada peringkat
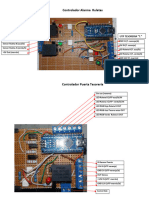
- Controlador Alarma RuletasDokumen6 halamanControlador Alarma RuletasMarcelo Estigarribia CymBelum ada peringkat
- Código para Calculadora en ATmega328PDokumen5 halamanCódigo para Calculadora en ATmega328PSebastian Vera MoralesBelum ada peringkat
- Informe Calculadora PICDokumen7 halamanInforme Calculadora PICMaria Jose ArguelloBelum ada peringkat
- Ejemplos OpenglDokumen9 halamanEjemplos Openglalvaro_chang1Belum ada peringkat
- Juego de Luces Con ArduinoDokumen6 halamanJuego de Luces Con Arduinosamuel ayllon plazaBelum ada peringkat
- Sistema Transporte Paciente ArduinoDokumen5 halamanSistema Transporte Paciente ArduinoRaul PerezBelum ada peringkat
- Parcial RoboticaDokumen4 halamanParcial RoboticaByron Josel Buitrago MartínezBelum ada peringkat
- Proyecto Carrito Controlado Por BluetoothDokumen11 halamanProyecto Carrito Controlado Por Bluetootharturo100% (5)
- EquiposDokumen2 halamanEquipossadhafzBelum ada peringkat
- Protocolo de Laboratorio N°5.Dokumen5 halamanProtocolo de Laboratorio N°5.Cristhianw QcBelum ada peringkat
- Sistema AnsulDokumen4 halamanSistema AnsulMaestrycous KairosBelum ada peringkat
- Detección de Prácticas No EcoeficientesDokumen3 halamanDetección de Prácticas No EcoeficientesDelia HernandezBelum ada peringkat
- Codigo de Colores de DiodosDokumen3 halamanCodigo de Colores de DiodosJoscatBelum ada peringkat
- Practica 02 Creación de TablasDokumen20 halamanPractica 02 Creación de TablasJorge Abel Elias MoralesBelum ada peringkat
- Red de CorrienteDokumen19 halamanRed de CorrienteElvisVasquezGonzalezBelum ada peringkat
- ALDEHIDOSDokumen2 halamanALDEHIDOSEnzo Gutierrez CatacoraBelum ada peringkat
- Cassado S.A. - Reparacion de EquiposDokumen36 halamanCassado S.A. - Reparacion de EquiposjhonatanBelum ada peringkat
- Proceso UnificadoDokumen6 halamanProceso UnificadoRider J-aBelum ada peringkat
- Gme - Mantenimiento Predictivo - Sesion 19aDokumen21 halamanGme - Mantenimiento Predictivo - Sesion 19aMario JimenezBelum ada peringkat
- 09 Durango 2Dokumen4 halaman09 Durango 2Jose Garcia MartinezBelum ada peringkat
- Memoria de Calculo de Pavimento RigidoDokumen15 halamanMemoria de Calculo de Pavimento RigidoMayrenee RodriguezBelum ada peringkat
- Charla Clasificación de Residuos SólidosDokumen23 halamanCharla Clasificación de Residuos SólidosAlexander Pabon100% (2)
- Manual de Uso Bizhub-162-210Dokumen8 halamanManual de Uso Bizhub-162-210Susana FrancoBelum ada peringkat
- 5726 Cuadrantes de La Policia en Su CelularDokumen3 halaman5726 Cuadrantes de La Policia en Su CelularoagomezBelum ada peringkat
- Estudio de Mecanica de SuelosDokumen4 halamanEstudio de Mecanica de SuelosAnthony Vega GuimareyBelum ada peringkat
- Herramientas TopografiaDokumen3 halamanHerramientas TopografiaKaren NuñezBelum ada peringkat
- Acta de Entrega Materiales La DesinfeccionDokumen4 halamanActa de Entrega Materiales La DesinfeccionWilliam FloresBelum ada peringkat
- Informe Mecanica MaterialesDokumen9 halamanInforme Mecanica MaterialesKevin LoraBelum ada peringkat
- Manual Quimica Organica 2Dokumen90 halamanManual Quimica Organica 2Lizeth Leon ChavezBelum ada peringkat
- Mazda BT-50 2008 BP-4-2600Dokumen2 halamanMazda BT-50 2008 BP-4-2600rene lunaBelum ada peringkat
- Alimentacion de AireDokumen12 halamanAlimentacion de AireVíctor daniel Hernández HernándezBelum ada peringkat
- Rocasyminerales 466Dokumen66 halamanRocasyminerales 466Orlando RojasBelum ada peringkat
- Tipos de PozosDokumen6 halamanTipos de PozosJOEL ATTO HERVAS100% (1)