Anda mungkin juga menyukai
- 110 Waveform Generator Projects for the Home ConstructorDari Everand110 Waveform Generator Projects for the Home ConstructorPenilaian: 4 dari 5 bintang4/5 (1)
- S.R.M and Drives: Mouli.TDokumen24 halamanS.R.M and Drives: Mouli.TMouliBelum ada peringkat
- Flight Test Instrumentation: Proceedings of the Third International Symposium 1964Dari EverandFlight Test Instrumentation: Proceedings of the Third International Symposium 1964M. A. PerryBelum ada peringkat
- Rotor-Earth-Fault ProtectionDokumen26 halamanRotor-Earth-Fault ProtectionSaghir Ahmad100% (1)
- Analog Circuit Design Volume 2: Immersion in the Black Art of Analog DesignDari EverandAnalog Circuit Design Volume 2: Immersion in the Black Art of Analog DesignBelum ada peringkat
- HCD H50Dokumen86 halamanHCD H50omarmix0% (1)
- Beginning Digital Electronics through ProjectsDari EverandBeginning Digital Electronics through ProjectsPenilaian: 5 dari 5 bintang5/5 (1)
- 04 Iec Short-Circuit Analysis PDFDokumen24 halaman04 Iec Short-Circuit Analysis PDFSupriyanto SuhonoBelum ada peringkat
- Pirate Radio and Video: Experimental Transmitter ProjectsDari EverandPirate Radio and Video: Experimental Transmitter ProjectsPenilaian: 5 dari 5 bintang5/5 (1)
- Am Trans 1Dokumen8 halamanAm Trans 1Nguyễn Thanh TùngBelum ada peringkat
- Linear IC Applications: A Designer's HandbookDari EverandLinear IC Applications: A Designer's HandbookPenilaian: 4 dari 5 bintang4/5 (1)
- Ut Em3 Variablefreqdrivetheory PDFDokumen86 halamanUt Em3 Variablefreqdrivetheory PDFMichael JohnstonBelum ada peringkat
- Design of Buildings for Wind: A Guide for ASCE 7-10 Standard Users and Designers of Special StructuresDari EverandDesign of Buildings for Wind: A Guide for ASCE 7-10 Standard Users and Designers of Special StructuresPenilaian: 3.5 dari 5 bintang3.5/5 (2)
- Aula6 - ConversoresDokumen26 halamanAula6 - ConversoreslucianoBelum ada peringkat
- 09 - Line Differential ProtectionDokumen66 halaman09 - Line Differential Protectionnabil160874100% (2)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Dari EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Belum ada peringkat
- Catalog SurgelogicDokumen14 halamanCatalog SurgelogicLuizBelum ada peringkat
- Build Your Own Low-Power Transmitters: Projects for the Electronics ExperimenterDari EverandBuild Your Own Low-Power Transmitters: Projects for the Electronics ExperimenterPenilaian: 5 dari 5 bintang5/5 (4)
- CT Sizing Calculation of 11kV System Rev0 Ver3Dokumen91 halamanCT Sizing Calculation of 11kV System Rev0 Ver3rajinipre-1100% (1)
- Measurement While Drilling: Signal Analysis, Optimization and DesignDari EverandMeasurement While Drilling: Signal Analysis, Optimization and DesignBelum ada peringkat
- Commom Emitter Amplifier Electronic ReportDokumen3 halamanCommom Emitter Amplifier Electronic ReportLuan MendesBelum ada peringkat
- TechRef 3 W TransformerDokumen22 halamanTechRef 3 W TransformerbalboinoBelum ada peringkat
- Base Station Antennas1Dokumen66 halamanBase Station Antennas1redha_rebaiBelum ada peringkat
- 377-Ed18 Harmonics Mitigation SolutionsDokumen31 halaman377-Ed18 Harmonics Mitigation SolutionsRadislav MilankovBelum ada peringkat
- 689 Track HoldDokumen35 halaman689 Track HoldShiva KumarBelum ada peringkat
- 5 Unit CommitmentDokumen17 halaman5 Unit CommitmentPrima D AndriBelum ada peringkat
- Power Transformer GTP - CommentedDokumen9 halamanPower Transformer GTP - CommentedNavneeth100% (1)
- Tut2 3DDokumen14 halamanTut2 3DUtkarsh VermaBelum ada peringkat
- Design of A Fully Differential High-Speed High-Precision AmplifierDokumen10 halamanDesign of A Fully Differential High-Speed High-Precision Amplifierkirkland1337Belum ada peringkat
- Function: Electrical, Electronics and Control Engineering at Operational LevelDokumen7 halamanFunction: Electrical, Electronics and Control Engineering at Operational LevelSanjeev SainiBelum ada peringkat
- Electric Circuit ManualDokumen140 halamanElectric Circuit ManualMd abdul karimBelum ada peringkat
- Control and Operation of Multi Termina VSC HVDCDokumen40 halamanControl and Operation of Multi Termina VSC HVDCDavid Jose Poma GuillenBelum ada peringkat
- Day 2 Part 1 Dist PrincipleDokumen24 halamanDay 2 Part 1 Dist Principlestopnaggingme1100% (1)
- SIEMENS - Out of Step ProtectionDokumen24 halamanSIEMENS - Out of Step ProtectionJose Alberto RodriguezBelum ada peringkat
- Machine Training PM Synchronous Ansoft MaxwellDokumen111 halamanMachine Training PM Synchronous Ansoft Maxwellmashinbaz1100% (3)
- Ee114 Project FinalDokumen14 halamanEe114 Project FinalSnehal PatilBelum ada peringkat
- HS-2420RH - Fast Sample and HolDokumen8 halamanHS-2420RH - Fast Sample and HolDeepa DevarajBelum ada peringkat
- Customer Tank GaugingDokumen63 halamanCustomer Tank GaugingGraciela CuizaraBelum ada peringkat
- CT Sizing Calculation of 11kV System-Rev0-Ver3Dokumen91 halamanCT Sizing Calculation of 11kV System-Rev0-Ver3yasararafat190% (10)
- Ee-2233 Electronic Circuit Design Assignment No 2Dokumen4 halamanEe-2233 Electronic Circuit Design Assignment No 2anon_458376542Belum ada peringkat
- DVR STG ProtocolDokumen8 halamanDVR STG Protocolprt24Belum ada peringkat
- Feedback Control of Dynamic Systems 2008Dokumen132 halamanFeedback Control of Dynamic Systems 2008Ju-Suk Yang83% (6)
- Ael-Uma: Application of Universal MotorDokumen7 halamanAel-Uma: Application of Universal MotorMaria Carla LazoBelum ada peringkat
- 607 Switched-Capacitor S-H and SwitchesDokumen34 halaman607 Switched-Capacitor S-H and SwitchesPraveen AndrewBelum ada peringkat
- CMCDokumen7 halamanCMCManel MontesinosBelum ada peringkat
- 32 224XServiceManualDokumen22 halaman32 224XServiceManualKaraseva OlgaBelum ada peringkat
- H ParametersDokumen6 halamanH ParametersPrince JainBelum ada peringkat
- KINAX 2W2 Data Sheet EnglishDokumen8 halamanKINAX 2W2 Data Sheet Englishyoeckoe100% (1)
- SAILOCTT - EESOLP3 Part 3Dokumen13 halamanSAILOCTT - EESOLP3 Part 3vectorBelum ada peringkat
- Power Lab 2Dokumen10 halamanPower Lab 2Mohammad Jakir HossainBelum ada peringkat
- Distance Protection: For Transmission Lines: Part 1Dokumen22 halamanDistance Protection: For Transmission Lines: Part 1Iisp ShamsBelum ada peringkat
- ABB Watchdog Relay CW-WDSDokumen4 halamanABB Watchdog Relay CW-WDSGiz999Belum ada peringkat
- Irwin, Basic Engineering Circuit Analysis, 9E SolutionsDokumen2.662 halamanIrwin, Basic Engineering Circuit Analysis, 9E SolutionsCarlos Fuentes Miranda93% (75)
- Power Electronic Training SystemDokumen82 halamanPower Electronic Training SystemZAKARIA AIT OUALIBelum ada peringkat
- Application Guide Medium Voltage Networks 01Dokumen28 halamanApplication Guide Medium Voltage Networks 01twinvbooksBelum ada peringkat
- UPDA ImportantDokumen10 halamanUPDA ImportantMohamedBelum ada peringkat
- Finite Element Analysis 2 AimDokumen6 halamanFinite Element Analysis 2 AimCalum WrightBelum ada peringkat
- An 23Dokumen12 halamanAn 23ディエゴ水上Belum ada peringkat
- Development of New AC To DC Converters For EHVDokumen5 halamanDevelopment of New AC To DC Converters For EHVMouliBelum ada peringkat
- New Text DocumentDokumen159 halamanNew Text DocumentMouliBelum ada peringkat
- What Is Power Electronics?Dokumen3 halamanWhat Is Power Electronics?MouliBelum ada peringkat
- State-Space Representation - Wikipedia, The Free EncyclopediaDokumen9 halamanState-Space Representation - Wikipedia, The Free EncyclopediaMouliBelum ada peringkat
- Full Spectrum Simulation Platform (Miniature Academic Version) For Power Electronics and Power SystemsDokumen35 halamanFull Spectrum Simulation Platform (Miniature Academic Version) For Power Electronics and Power SystemsMouliBelum ada peringkat
- 1 Output Controllability: MAE 280A 1 Maur Icio de OliveiraDokumen10 halaman1 Output Controllability: MAE 280A 1 Maur Icio de OliveiraMouliBelum ada peringkat
- Trigger CircuitDokumen9 halamanTrigger CircuitMouliBelum ada peringkat
- Eigenvectors and DiagonalizationDokumen10 halamanEigenvectors and DiagonalizationMouliBelum ada peringkat
- 1 More On The Cayley-Hamilton Theorem: MAE 280A 1 Maur Icio de OliveiraDokumen7 halaman1 More On The Cayley-Hamilton Theorem: MAE 280A 1 Maur Icio de OliveiraMouliBelum ada peringkat
- State Space ProblemsDokumen87 halamanState Space ProblemsMouli0% (1)
- 1 Some Facts On Symmetric Matrices: MAE 280A 1 Maur Icio de OliveiraDokumen9 halaman1 Some Facts On Symmetric Matrices: MAE 280A 1 Maur Icio de OliveiraMouliBelum ada peringkat
- 1 Minimal Realizations: Co o C C o 1 2 Co 3 C o 1 Co C oDokumen6 halaman1 Minimal Realizations: Co o C C o 1 2 Co 3 C o 1 Co C oMouliBelum ada peringkat
- Allied Product Overview 20190304Dokumen24 halamanAllied Product Overview 20190304MouliBelum ada peringkat
- TeslaDokumen17 halamanTeslaMouliBelum ada peringkat
- 1 Zeros of LTI Systems: MAE 280A 1 Maur Icio de OliveiraDokumen9 halaman1 Zeros of LTI Systems: MAE 280A 1 Maur Icio de OliveiraMouliBelum ada peringkat
- Jordan Canonical Form Generalized Modes Cayley-Hamilton TheoremDokumen14 halamanJordan Canonical Form Generalized Modes Cayley-Hamilton TheoremMouliBelum ada peringkat
- HW2 SolDokumen5 halamanHW2 SolMouliBelum ada peringkat
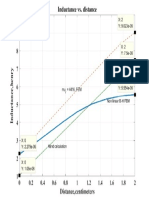
- Inductance VariationDokumen1 halamanInductance VariationMouliBelum ada peringkat
- HW1 SolDokumen10 halamanHW1 SolMouliBelum ada peringkat
- Analysisof Aperiodicand Chaotic Motionsina LSRMversionpublieDokumen5 halamanAnalysisof Aperiodicand Chaotic Motionsina LSRMversionpublieMouliBelum ada peringkat
- IETE Template (Technical Review)Dokumen6 halamanIETE Template (Technical Review)MouliBelum ada peringkat
- HT0500x FramelessTorqueMotors Datasheet R5Dokumen4 halamanHT0500x FramelessTorqueMotors Datasheet R5MouliBelum ada peringkat
- Weekly Report Template 1Dokumen5 halamanWeekly Report Template 1MouliBelum ada peringkat
- Extremal TraceDokumen16 halamanExtremal TraceMouliBelum ada peringkat