Anda mungkin juga menyukai
- Introduction - Basic Concepts & Static Performance CharacteristicsDokumen29 halamanIntroduction - Basic Concepts & Static Performance CharacteristicsMohammad Lutfi AssaidikyBelum ada peringkat
- Week 5-6 - Measurement and ErrorDokumen61 halamanWeek 5-6 - Measurement and ErrorEbubekir ÖzcanBelum ada peringkat
- SESM3030 - 01 IntroductionDokumen15 halamanSESM3030 - 01 Introductionjiales225Belum ada peringkat
- I4c2021 1023Dokumen6 halamanI4c2021 1023shilpakcBelum ada peringkat
- Dynamic Parameter Estimation of Analog To Digital Converter With Multipoint Interpolation TechniqueDokumen9 halamanDynamic Parameter Estimation of Analog To Digital Converter With Multipoint Interpolation TechniqueKassaye GizawBelum ada peringkat
- Chapter One PDFDokumen25 halamanChapter One PDFHassan AliBelum ada peringkat
- Department of Computer EngineeringDokumen9 halamanDepartment of Computer EngineeringNehaBelum ada peringkat
- ECE4001 Digital Communication Systems: Fall 2021 A1+TA1 Dr. R. RameshDokumen20 halamanECE4001 Digital Communication Systems: Fall 2021 A1+TA1 Dr. R. RameshMANSI BHARDWAJBelum ada peringkat
- Emi PPT All UnitsDokumen412 halamanEmi PPT All Unitssrinivasarao mBelum ada peringkat
- Measurement System BehaviourDokumen48 halamanMeasurement System BehaviourpitapitulBelum ada peringkat
- MI-UNIT-I-Lect3 4 Static and Dynamic CharacteristicsDokumen32 halamanMI-UNIT-I-Lect3 4 Static and Dynamic CharacteristicsPratik ABelum ada peringkat
- Understanding Errors in MeasurmentDokumen130 halamanUnderstanding Errors in MeasurmentShovel_HeadBelum ada peringkat
- Measuring Principles Lab Manual: Static and Dynamic Instrument CharacteristicsDokumen35 halamanMeasuring Principles Lab Manual: Static and Dynamic Instrument CharacteristicsBMD DBMBelum ada peringkat
- Exercise #11 (Statistics)Dokumen36 halamanExercise #11 (Statistics)Nirta RathiBelum ada peringkat
- Acvuracy Precision Error Unit-1Dokumen29 halamanAcvuracy Precision Error Unit-1manjot kaurBelum ada peringkat
- Ee300 CH1Dokumen55 halamanEe300 CH1Yousef AhmedBelum ada peringkat
- Lect 1 IntroductionDokumen57 halamanLect 1 IntroductionAqiaf Khan SikandriBelum ada peringkat
- Principles of Analog-to-Digital Conversion (Ch 4Dokumen35 halamanPrinciples of Analog-to-Digital Conversion (Ch 4Dr-Eng Imad A. ShaheenBelum ada peringkat
- MSA For Continuous DataDokumen8 halamanMSA For Continuous DataMuhammad Alief OthmanBelum ada peringkat
- AnalysisDokumen37 halamanAnalysisvishal sharmaBelum ada peringkat
- ddPCRuncertainties PHCDokumen25 halamanddPCRuncertainties PHCAmira BaihaniBelum ada peringkat
- EC8501 UNIT 2 Linear Predictive CodingDokumen12 halamanEC8501 UNIT 2 Linear Predictive CodingmadhuBelum ada peringkat
- Oedp Lab ManualDokumen74 halamanOedp Lab ManualJozachBelum ada peringkat
- Labr-4 222LDokumen8 halamanLabr-4 222LOvi SahaBelum ada peringkat
- Chapter 2 Evaluation of Experimental DataDokumen55 halamanChapter 2 Evaluation of Experimental DataSyahshaiBelum ada peringkat
- Statistics - Review 26 Oct 2022Dokumen31 halamanStatistics - Review 26 Oct 2022Tsz Wun CHOWBelum ada peringkat
- EE305 Instrumentation and Measurement Teaching Assistant Šejla DžakmićDokumen11 halamanEE305 Instrumentation and Measurement Teaching Assistant Šejla DžakmićFrank WhiteBelum ada peringkat
- Lab 1 - 2 PDFDokumen6 halamanLab 1 - 2 PDFMixTaMaNieBelum ada peringkat
- Digital Systems I EC 381: Mohamed ElgalhudDokumen19 halamanDigital Systems I EC 381: Mohamed ElgalhudCorazon corazonBelum ada peringkat
- Phy Data 1Dokumen2 halamanPhy Data 1Andy HungBelum ada peringkat
- DPCMDokumen10 halamanDPCMArun Kumar DhupamBelum ada peringkat
- ECE313 Lesson5 DM ADM DPCM ADPCM 1stsem2023-24Dokumen22 halamanECE313 Lesson5 DM ADM DPCM ADPCM 1stsem2023-24DelanBelum ada peringkat
- Concepts of MeasurementDokumen79 halamanConcepts of MeasurementAbhitesh LCO20573Belum ada peringkat
- Teknik PengaturanDokumen24 halamanTeknik PengaturanImam SyarifudinBelum ada peringkat
- Chapter 02 - Measurement Error AnalysisDokumen47 halamanChapter 02 - Measurement Error AnalysishlkjjkBelum ada peringkat
- Cell: 9952749533 WWW - Researchprojects.infoDokumen76 halamanCell: 9952749533 WWW - Researchprojects.infosetsindia3735Belum ada peringkat
- MT8591 S&I IA1 Q&A IIIyearDokumen60 halamanMT8591 S&I IA1 Q&A IIIyearILYASBelum ada peringkat
- Part OneDokumen69 halamanPart OneAbdulrahman Muhammad JamiuBelum ada peringkat
- Metrology Lab - ManualDokumen30 halamanMetrology Lab - ManualRavi Krishnegowda100% (2)
- Quad 1Dokumen14 halamanQuad 1prakhartripathi826Belum ada peringkat
- Make Sense of Instrument SpecsDokumen8 halamanMake Sense of Instrument SpecsmaryussoBelum ada peringkat
- Quantitative Analysis and Statistics Course OverviewDokumen71 halamanQuantitative Analysis and Statistics Course OverviewErum AnwerBelum ada peringkat
- Differential Pulse Code Modulation Working and ApplicationDokumen5 halamanDifferential Pulse Code Modulation Working and ApplicationhicevBelum ada peringkat
- Digital Signal Processing: Course Code: Credit Hours:3 Prerequisite:30107341Dokumen33 halamanDigital Signal Processing: Course Code: Credit Hours:3 Prerequisite:30107341محمد القدوميBelum ada peringkat
- Optimasi Parameter 3D Printing Terhadap Keakuratan Dimensi Dan Kekasaran Permukaan Produk Menggunakan Metode Taguchi GreyDokumen4 halamanOptimasi Parameter 3D Printing Terhadap Keakuratan Dimensi Dan Kekasaran Permukaan Produk Menggunakan Metode Taguchi GreyRoni SewikoBelum ada peringkat
- ECC2201 Digital Signal Processing TechniquesDokumen13 halamanECC2201 Digital Signal Processing TechniquesSuraaj Sakthi KumarBelum ada peringkat
- Sub Module 1.2 2. Errors in MeasurementsDokumen4 halamanSub Module 1.2 2. Errors in MeasurementscaptainhassBelum ada peringkat
- CHM025 - Topic II Evaluation of Analytical DataDokumen58 halamanCHM025 - Topic II Evaluation of Analytical DataLaarnie B. CLATABelum ada peringkat
- Chapter 1 - Introduction To InstrumentationDokumen31 halamanChapter 1 - Introduction To InstrumentationANDREW LEONG CHUN TATT STUDENTBelum ada peringkat
- Engineering Estimations & ApproximationsDokumen28 halamanEngineering Estimations & ApproximationsFarhan IkhwanBelum ada peringkat
- Digital signal processingDokumen9 halamanDigital signal processingChaitanyaBelum ada peringkat
- UNIT 1 - Introduction To Measurement SystemDokumen55 halamanUNIT 1 - Introduction To Measurement SystemPoornima ABelum ada peringkat
- Sensors and Measurements in ElectronicsDokumen35 halamanSensors and Measurements in Electronicsdrunken monkeyBelum ada peringkat
- Practical key words explainedDokumen16 halamanPractical key words explainedAdam TanBelum ada peringkat
- Advanced Instrumentation: - Course ContentsDokumen22 halamanAdvanced Instrumentation: - Course Contentsee05d008Belum ada peringkat
- Unit 1 Concept of MeasurementDokumen79 halamanUnit 1 Concept of MeasurementDrMohamed MansourBelum ada peringkat
- Digital Signal Processing: A Practical Guide for Engineers and ScientistsDari EverandDigital Signal Processing: A Practical Guide for Engineers and ScientistsPenilaian: 4.5 dari 5 bintang4.5/5 (7)
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsDari EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsBelum ada peringkat
- JRSTAN Volume4 Issue1 Pages53-63Dokumen12 halamanJRSTAN Volume4 Issue1 Pages53-63Ridho Iqbal MaulanaBelum ada peringkat
- Pin Failure MITDokumen89 halamanPin Failure MITRidho Iqbal MaulanaBelum ada peringkat
- Research of Crack Initiation in Tension Test Specimen Made of Nickel Alloy EI961shDokumen5 halamanResearch of Crack Initiation in Tension Test Specimen Made of Nickel Alloy EI961shRidho Iqbal MaulanaBelum ada peringkat
- Introduction To Material HandlingDokumen244 halamanIntroduction To Material HandlingAreda100% (3)
- Notes Socialism in Europe and RussianDokumen11 halamanNotes Socialism in Europe and RussianAyaan ImamBelum ada peringkat
- Chronic Pancreatitis - Management - UpToDateDokumen22 halamanChronic Pancreatitis - Management - UpToDateJose Miranda ChavezBelum ada peringkat
- 2013 Gerber CatalogDokumen84 halaman2013 Gerber CatalogMario LopezBelum ada peringkat
- La TraviataDokumen12 halamanLa TraviataEljona YzellariBelum ada peringkat
- Digital Movement Guide CodesDokumen18 halamanDigital Movement Guide Codescgeorgiou80Belum ada peringkat
- CSR of Cadbury LTDDokumen10 halamanCSR of Cadbury LTDKinjal BhanushaliBelum ada peringkat
- Will You Be There? Song ActivitiesDokumen3 halamanWill You Be There? Song ActivitieszelindaaBelum ada peringkat
- Java Interview Questions: Interfaces, Abstract Classes, Overloading, OverridingDokumen2 halamanJava Interview Questions: Interfaces, Abstract Classes, Overloading, OverridingGopal JoshiBelum ada peringkat
- IndiGo flight booking from Ahmedabad to DurgaPurDokumen2 halamanIndiGo flight booking from Ahmedabad to DurgaPurVikram RajpurohitBelum ada peringkat
- Role of Rahu and Ketu at The Time of DeathDokumen7 halamanRole of Rahu and Ketu at The Time of DeathAnton Duda HerediaBelum ada peringkat
- GCSE Ratio ExercisesDokumen2 halamanGCSE Ratio ExercisesCarlos l99l7671Belum ada peringkat
- Mari 1.4v2 GettingStartedGuide PDFDokumen57 halamanMari 1.4v2 GettingStartedGuide PDFCarlos Vladimir Roa LunaBelum ada peringkat
- Barra de Pinos 90G 2x5 P. 2,54mm - WE 612 010 217 21Dokumen2 halamanBarra de Pinos 90G 2x5 P. 2,54mm - WE 612 010 217 21Conrado Almeida De OliveiraBelum ada peringkat
- Business Simulation Training Opportunity - V1.0Dokumen15 halamanBusiness Simulation Training Opportunity - V1.0Waqar Shadani100% (1)
- 1120 Assessment 1A - Self-Assessment and Life GoalDokumen3 halaman1120 Assessment 1A - Self-Assessment and Life GoalLia LeBelum ada peringkat
- Chapter 12 The Incredible Story of How The Great Controversy Was Copied by White From Others, and Then She Claimed It To Be Inspired.Dokumen6 halamanChapter 12 The Incredible Story of How The Great Controversy Was Copied by White From Others, and Then She Claimed It To Be Inspired.Barry Lutz Sr.Belum ada peringkat
- Jesus' Death on the Cross Explored Through Theological ModelsDokumen13 halamanJesus' Death on the Cross Explored Through Theological ModelsKhristian Joshua G. JuradoBelum ada peringkat
- Year 11 Economics Introduction NotesDokumen9 halamanYear 11 Economics Introduction Notesanon_3154664060% (1)
- Popular Painters & Other Visionaries. Museo Del BarrioDokumen18 halamanPopular Painters & Other Visionaries. Museo Del BarrioRenato MenezesBelum ada peringkat
- 12 Preliminary Conference BriefDokumen7 halaman12 Preliminary Conference Briefkaizen shinichiBelum ada peringkat
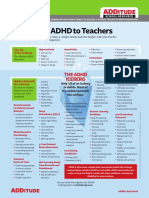
- Explaining ADHD To TeachersDokumen1 halamanExplaining ADHD To TeachersChris100% (2)
- 11th AccountancyDokumen13 halaman11th AccountancyNarendar KumarBelum ada peringkat
- MatriarchyDokumen11 halamanMatriarchyKristopher Trey100% (1)
- Factors Affecting English Speaking Skills of StudentsDokumen18 halamanFactors Affecting English Speaking Skills of StudentsRona Jane MirandaBelum ada peringkat
- York Product Listing 2011Dokumen49 halamanYork Product Listing 2011designsolutionsallBelum ada peringkat
- 2Dokumen5 halaman2Frances CiaBelum ada peringkat
- Product Packaging, Labelling and Shipping Plans: What's NextDokumen17 halamanProduct Packaging, Labelling and Shipping Plans: What's NextShameer ShahBelum ada peringkat
- MA CHAPTER 2 Zero Based BudgetingDokumen2 halamanMA CHAPTER 2 Zero Based BudgetingMohd Zubair KhanBelum ada peringkat
- Settlement of Piled Foundations Using Equivalent Raft ApproachDokumen17 halamanSettlement of Piled Foundations Using Equivalent Raft ApproachSebastian DraghiciBelum ada peringkat
- Important TemperatefruitsDokumen33 halamanImportant TemperatefruitsjosephinBelum ada peringkat