Anda mungkin juga menyukai
- Relatorio Analise OrganicaDokumen17 halamanRelatorio Analise Organicavilmar konageski jr100% (4)
- Aula #01 - Sensores (Digitais e Analógicos) Tipos e Características.Dokumen131 halamanAula #01 - Sensores (Digitais e Analógicos) Tipos e Características.João Marcos OliveiraBelum ada peringkat
- Projeto de Um Controlador PID para o Controle de Luminosidade de Faróis de Um VeículoDokumen6 halamanProjeto de Um Controlador PID para o Controle de Luminosidade de Faróis de Um VeículoNetto Lopes100% (1)
- 002 - Criminologia AMBIENTALDokumen19 halaman002 - Criminologia AMBIENTALf_f_claudio100% (2)
- Proced Criar NOVA CONTA No FusionSolar MONODokumen4 halamanProced Criar NOVA CONTA No FusionSolar MONOCharles CardosoBelum ada peringkat
- Resumo - CLPDokumen14 halamanResumo - CLPNAURI LEITEBelum ada peringkat
- Exp - 02 - LuminosidadeDokumen8 halamanExp - 02 - LuminosidadeJoseilton SouzaBelum ada peringkat
- Fotocelula e TemporizadorDokumen12 halamanFotocelula e TemporizadorAmérico TivaneBelum ada peringkat
- Avalia o Do Desempenho de Metodologias de Aplica o OOS 1681383988Dokumen12 halamanAvalia o Do Desempenho de Metodologias de Aplica o OOS 1681383988brunocedupBelum ada peringkat
- WETZEL ebook-CONCEPTOS DE ILUMINACION LEDDokumen10 halamanWETZEL ebook-CONCEPTOS DE ILUMINACION LEDpicolindoBelum ada peringkat
- Aula 2 Introdução de TransdutoresDokumen50 halamanAula 2 Introdução de TransdutoresAdler LinharesBelum ada peringkat
- Relatorio Maquinas Pratica 3Dokumen7 halamanRelatorio Maquinas Pratica 3GustavoOliveiraBelum ada peringkat
- Relatorio Certo AtualizadoDokumen15 halamanRelatorio Certo AtualizadoLuiz Gustavo Oliveira MartinsBelum ada peringkat
- Aula 01 - Sensores IndustriaisDokumen16 halamanAula 01 - Sensores IndustriaisAntónio OliveiraBelum ada peringkat
- Sensor de Sombra: Out inDokumen6 halamanSensor de Sombra: Out inricarddorochaBelum ada peringkat
- Aula 2 Automacao Industrial IDokumen84 halamanAula 2 Automacao Industrial IMarcelo Lima CardosoBelum ada peringkat
- Sensores Leitura Ótica e ComparadorDokumen1 halamanSensores Leitura Ótica e ComparadorYoseph MichaelBelum ada peringkat
- Sensores e CompressoresDokumen12 halamanSensores e CompressoresKaic GuedesBelum ada peringkat
- A Comparação Entre Um Microfone de Eletreto e Um LDR Como Detectores de Luz Num Sistema de Espectroscopia Ótica PDFDokumen58 halamanA Comparação Entre Um Microfone de Eletreto e Um LDR Como Detectores de Luz Num Sistema de Espectroscopia Ótica PDFSamuel PivaBelum ada peringkat
- Cap 1 Introducao - Sistemas de MediçãoDokumen30 halamanCap 1 Introducao - Sistemas de MediçãoRuan Henrique ColomboBelum ada peringkat
- Comandos EletricosDokumen5 halamanComandos EletricosanaderBelum ada peringkat
- Manual DK-8 Instalações ElétricasDokumen38 halamanManual DK-8 Instalações ElétricasFrancisco MeloBelum ada peringkat
- Tutorial Eletronica - Aplicacoes e Funcionamento de SensoresDokumen84 halamanTutorial Eletronica - Aplicacoes e Funcionamento de Sensoresph_lopsBelum ada peringkat
- Sensores e Transdutores - ResumoDokumen15 halamanSensores e Transdutores - ResumojplmarquesBelum ada peringkat
- WEG Multimedidor MMW03 CH Manual Do Usuario 10006647116 PTDokumen36 halamanWEG Multimedidor MMW03 CH Manual Do Usuario 10006647116 PTJbprofessor BatistaBelum ada peringkat
- Resumo Sobre SensoresDokumen13 halamanResumo Sobre SensoresCélio JuniorBelum ada peringkat
- 02 Elem SensoresDokumen10 halaman02 Elem SensoresjesusBelum ada peringkat
- Manoellds ArtDokumen11 halamanManoellds ArtWillian RibasBelum ada peringkat
- Trabalho Solar Tracker PDFDokumen19 halamanTrabalho Solar Tracker PDFluiliosmBelum ada peringkat
- Relatorio Guia 3 - Apllicações HCS12Dokumen8 halamanRelatorio Guia 3 - Apllicações HCS12Eduardo SerenoBelum ada peringkat
- Sandra Silva Eletrônica Linear IDokumen54 halamanSandra Silva Eletrônica Linear I979104025Belum ada peringkat
- Lab9, Sensores de PresençaDokumen6 halamanLab9, Sensores de PresençaGabriel RibeiroBelum ada peringkat
- Guia de EstudosDokumen59 halamanGuia de EstudosmoreiraviniciBelum ada peringkat
- Sensores MecânicosDokumen8 halamanSensores MecânicosAnisio ManhiçaBelum ada peringkat
- Medidas Electricas Job Retificado FinalDokumen14 halamanMedidas Electricas Job Retificado FinalEdmilson Rui ChauqueBelum ada peringkat
- Sensores MagneticosDokumen21 halamanSensores MagneticosEdlásio HenriquesBelum ada peringkat
- Relatório 3 - Medição de DeslocamentoDokumen9 halamanRelatório 3 - Medição de DeslocamentoNathan LuizBelum ada peringkat
- Slide Aula 1-Instrumentação - IndustrialDokumen32 halamanSlide Aula 1-Instrumentação - IndustrialcakimaviBelum ada peringkat
- Sensores Controladores e Atuadores em PcaDokumen21 halamanSensores Controladores e Atuadores em PcaAdozindo FF7 SASUKEBelum ada peringkat
- Sinotruk - Sensores e AtuadoresDokumen31 halamanSinotruk - Sensores e Atuadorestadeu100% (2)
- Apostila de SensoresDokumen93 halamanApostila de SensoresAna Carolina Kutika67% (3)
- FINALDokumen50 halamanFINALRAFAEL CASSIOBelum ada peringkat
- Felipe Dos Santos - Relatório Regulador MonolíticoDokumen8 halamanFelipe Dos Santos - Relatório Regulador MonolíticoFelipe SantosBelum ada peringkat
- Trabalho de Pesquisa 02 - MedidoresDokumen5 halamanTrabalho de Pesquisa 02 - Medidoresana.souza.cefetBelum ada peringkat
- Trabalho de Comandos Elétricos SensoresDokumen15 halamanTrabalho de Comandos Elétricos SensoresBruna GuimarãesBelum ada peringkat
- LDR 1Dokumen3 halamanLDR 1Augusto HenriqueBelum ada peringkat
- TemporizadoresDokumen9 halamanTemporizadores3v4ndroBelum ada peringkat
- Apostila Completa de InstrumentaçãoDokumen148 halamanApostila Completa de Instrumentaçãommd3Belum ada peringkat
- Sensores Indústriais 5Dokumen20 halamanSensores Indústriais 5Igor FelipeBelum ada peringkat
- RESUMAODokumen50 halamanRESUMAOCristiano DellazariBelum ada peringkat
- Girassol Eletronico 15-1Dokumen29 halamanGirassol Eletronico 15-1DudurebaBelum ada peringkat
- Trabalho 1 - DefinitivoDokumen9 halamanTrabalho 1 - DefinitivoZacarias NotaBelum ada peringkat
- Ebook Cálculo Luminotécnico Método SimplificadoDokumen20 halamanEbook Cálculo Luminotécnico Método SimplificadoRui Ferreira100% (1)
- 2688 e 2799 - Manual de EletricidadeDokumen31 halaman2688 e 2799 - Manual de EletricidadeDaniel Santiago Saavedra Salazar100% (1)
- Programação Em C Para Controle De Ângulo De DisparoDari EverandProgramação Em C Para Controle De Ângulo De DisparoBelum ada peringkat
- Como Testar Componentes EletrônicosDari EverandComo Testar Componentes EletrônicosPenilaian: 4.5 dari 5 bintang4.5/5 (2)
- Projetos Em Clp Ladder Baseado No Twidosuite Parte ViiiDari EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte ViiiBelum ada peringkat
- Projetos Com Esp8266 Programado Em Arduino - Parte XvDari EverandProjetos Com Esp8266 Programado Em Arduino - Parte XvBelum ada peringkat
- Projetos Em Clp Ladder Baseado Na Placa Arduino Uno Parte ViiiDari EverandProjetos Em Clp Ladder Baseado Na Placa Arduino Uno Parte ViiiBelum ada peringkat
- RoteiroDokumen7 halamanRoteiroGeraldoPugialliBelum ada peringkat
- Programa PDFDokumen1 halamanPrograma PDFGeraldoPugialliBelum ada peringkat
- ArhxbejDokumen4 halamanArhxbejGeraldoPugialliBelum ada peringkat
- TesteDokumen1 halamanTesteGeraldoPugialliBelum ada peringkat
- Partida Triângulo EstrelaDokumen1 halamanPartida Triângulo EstrelaGeraldoPugialliBelum ada peringkat
- F10 Hfen11 em Guia Prof Resumo Al 10anoDokumen3 halamanF10 Hfen11 em Guia Prof Resumo Al 10anoCatarina StelmashchukBelum ada peringkat
- Apreciação CríticaDokumen1 halamanApreciação CríticaSílvia OliveiraBelum ada peringkat
- Extensao Counitaria IDokumen17 halamanExtensao Counitaria Idércio nevesBelum ada peringkat
- Guia de Identificação Das Pastagens Nativas Do Pantanal (2019)Dokumen223 halamanGuia de Identificação Das Pastagens Nativas Do Pantanal (2019)Andreia CostaBelum ada peringkat
- Proteção de Sistemas PDFDokumen23 halamanProteção de Sistemas PDFRafael De Lima Gabardo100% (1)
- Curso Técnico de RestauraçãoDokumen2 halamanCurso Técnico de RestauraçãoVítorFernandoMarquesCoitoBelum ada peringkat
- Programa de Hipertrofia Feminina GRATIS Nivel 1 MescladoDokumen11 halamanPrograma de Hipertrofia Feminina GRATIS Nivel 1 MescladoCasa na VilaBelum ada peringkat
- Óquio: Istema Etro ErroviárioDokumen96 halamanÓquio: Istema Etro ErroviárioJLBelum ada peringkat
- Yago CastroDokumen21 halamanYago CastroYago CastroBelum ada peringkat
- EmpreenderismoDokumen16 halamanEmpreenderismoLúcia Silva Silva100% (1)
- Trabalho de TGA - Handy, Fayol e FordDokumen9 halamanTrabalho de TGA - Handy, Fayol e FordMarcos Roberto RosaBelum ada peringkat
- Moldes - Chapeu de MarinheiroDokumen3 halamanMoldes - Chapeu de Marinheiroph mixBelum ada peringkat
- Registro Na Jucesp de Armazém GeralDokumen3 halamanRegistro Na Jucesp de Armazém Geralabertura de empresaBelum ada peringkat
- Ramos de Uma Grande Arvore PDFDokumen145 halamanRamos de Uma Grande Arvore PDFRafael OliveiraBelum ada peringkat
- AutoP03158216425 PDFDokumen1 halamanAutoP03158216425 PDFwitalo taveiraBelum ada peringkat
- AD1Música 2021.2 CEDERJ UNIRIO PEDAGOGIADokumen5 halamanAD1Música 2021.2 CEDERJ UNIRIO PEDAGOGIAMaria da Conceição SilvaBelum ada peringkat
- Relatório de Levantamento MaterialDokumen2 halamanRelatório de Levantamento MaterialHeltonsubrg SystemBelum ada peringkat
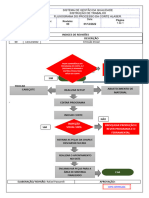
- 10 FLUXO CORTE LASER - Revisado 21-07-2020Dokumen1 halaman10 FLUXO CORTE LASER - Revisado 21-07-2020Rafael PassarelliBelum ada peringkat
- RESGATE HISTÓRICO DE UMA COMUNIDADE: Um Olhar Sobre A História e Os Patrimônios Culturais Material e Natural Do Bairro Ponte AltaDokumen39 halamanRESGATE HISTÓRICO DE UMA COMUNIDADE: Um Olhar Sobre A História e Os Patrimônios Culturais Material e Natural Do Bairro Ponte AltaPeterson Mendes PaulinoBelum ada peringkat
- 02 - Princípios Da RadioterapiaDokumen6 halaman02 - Princípios Da RadioterapiaForwomenBelum ada peringkat
- Cartilha FNS - Acesso A Recursos Da Saúde 2022Dokumen166 halamanCartilha FNS - Acesso A Recursos Da Saúde 2022vieiraianaBelum ada peringkat
- Estrutura Remuneratoria Senai (74131)Dokumen7 halamanEstrutura Remuneratoria Senai (74131)Lucimari SuzukiBelum ada peringkat
- Gestão Tributaria Da Cadeia de Suprimentos - 2013 - Cap - 6Dokumen2 halamanGestão Tributaria Da Cadeia de Suprimentos - 2013 - Cap - 6hawks 5.0Belum ada peringkat
- Prova Teorica NR 06Dokumen2 halamanProva Teorica NR 06Lih AssisBelum ada peringkat
- Geometria ÁtomoDokumen4 halamanGeometria Átomoemarchesi2012Belum ada peringkat
- Poemas - Pablo NerudaDokumen2 halamanPoemas - Pablo NerudaDenise SiqueiraBelum ada peringkat
- Apostila Projeção Da Consciência - Waldo VieiraDokumen12 halamanApostila Projeção Da Consciência - Waldo VieiraRanilson Angelo100% (1)