Anda mungkin juga menyukai
- MC Lab ManualDokumen74 halamanMC Lab Manualrahul shindeBelum ada peringkat
- Project Report 2Dokumen57 halamanProject Report 2brijpatel909Belum ada peringkat
- AGV Project ReportDokumen46 halamanAGV Project ReportPratheesh Pala100% (7)
- Project Report On Microcontroller Based Traffic Light ControllerDokumen23 halamanProject Report On Microcontroller Based Traffic Light Controllerالموعظة الحسنه chanelBelum ada peringkat
- Maadhav IT Front PaperDokumen97 halamanMaadhav IT Front PaperSRL MECHBelum ada peringkat
- Seminar Report On 8051 MicrocontrollerDokumen21 halamanSeminar Report On 8051 MicrocontrollerChiyan RanjithBelum ada peringkat
- Analog To Digital Convertor Interface With 8051 MicrocontrollerDokumen28 halamanAnalog To Digital Convertor Interface With 8051 MicrocontrollerbbbbgcbgbeBelum ada peringkat
- Microcontroller Lab ManualDokumen50 halamanMicrocontroller Lab ManualR ABelum ada peringkat
- IOT Assignment Final ReportDokumen20 halamanIOT Assignment Final ReportPrathusha ReddyBelum ada peringkat
- 8051 MicrocontrollerDokumen10 halaman8051 Microcontrollerfirodiya121Belum ada peringkat
- Interfacing The Led Using 8086 MicroprocessorDokumen12 halamanInterfacing The Led Using 8086 MicroprocessorSingarayyaBelum ada peringkat
- Devloper BoardDokumen82 halamanDevloper Boardpukhraj titreBelum ada peringkat
- Mpi Final Report V FinalDokumen16 halamanMpi Final Report V FinalAsim AslamBelum ada peringkat
- Project Report On Microcontroller Based Traffic Light ControllerDokumen22 halamanProject Report On Microcontroller Based Traffic Light ControllerMohitpariharBelum ada peringkat
- Project Report DoorDokumen48 halamanProject Report Doornehadudeja14100% (3)
- Hardware Training Report NEWDokumen45 halamanHardware Training Report NEWhr. infotechnogenplBelum ada peringkat
- Mca Etc Jdcoem Lab Manual AkiDokumen26 halamanMca Etc Jdcoem Lab Manual AkiAshwini MateBelum ada peringkat
- Solar Grass CutterDokumen22 halamanSolar Grass CutterPrathik AkkapallyBelum ada peringkat
- RS 485Dokumen51 halamanRS 485mgitecetech100% (1)
- Brown Final PPT FinalDokumen36 halamanBrown Final PPT FinalDarshan100% (2)
- Line Follwer RobotDokumen32 halamanLine Follwer RobotSahil DhingraBelum ada peringkat
- Prototype For Automation Locomotive: Submitted byDokumen42 halamanPrototype For Automation Locomotive: Submitted byIrene ThanisBelum ada peringkat
- Energy Monitoring SystemDokumen26 halamanEnergy Monitoring SystemFebzBelum ada peringkat
- 8085 Microprocessor and 8051 MicrocontrollerDokumen107 halaman8085 Microprocessor and 8051 Microcontrollerparandaman.mechBelum ada peringkat
- FinalDokumen33 halamanFinalnaveenaBelum ada peringkat
- "Computer Controlled" Home Appliance Control: B.Tech Project ReportDokumen26 halaman"Computer Controlled" Home Appliance Control: B.Tech Project ReportashishBelum ada peringkat
- Micro Controller Based Traffic Light Controller: Er. Sunimerjit KaurDokumen26 halamanMicro Controller Based Traffic Light Controller: Er. Sunimerjit KaurRahul Sharma100% (1)
- PROJECT Mislestone 1Dokumen8 halamanPROJECT Mislestone 1Kirankumar ReddyBelum ada peringkat
- Project FileDokumen6 halamanProject Filefirodiya121Belum ada peringkat
- Gokaraju Rangaraju Institute of Engineering and Technology (Autonomous) Project ReportDokumen28 halamanGokaraju Rangaraju Institute of Engineering and Technology (Autonomous) Project ReportJeevan KumarBelum ada peringkat
- Minor Project On: Gas Detection and Alert SystemDokumen43 halamanMinor Project On: Gas Detection and Alert SystemAnonymous ytZsBOVBelum ada peringkat
- 14EE490 - MC Lab Manual 2019 PDFDokumen57 halaman14EE490 - MC Lab Manual 2019 PDFkavithaBelum ada peringkat
- MIcrocontroller Based Embedded System E - ContentsDokumen54 halamanMIcrocontroller Based Embedded System E - ContentsLokesh SharmaBelum ada peringkat
- "Speed Control and Protection of Induction Motor Using Internet of ThingDokumen34 halaman"Speed Control and Protection of Induction Motor Using Internet of ThingDarshan0% (1)
- Project Report On Repaired)Dokumen48 halamanProject Report On Repaired)Robert White67% (3)
- Institute of Engineering and Technology, Alwar, Rajasthan: Wireless Keypad Controlled RobotDokumen44 halamanInstitute of Engineering and Technology, Alwar, Rajasthan: Wireless Keypad Controlled RobotTwinkle SinghBelum ada peringkat
- Microcontrollers 2017-18 Lab ManualDokumen58 halamanMicrocontrollers 2017-18 Lab ManualSUNIL KUMAR100% (1)
- FM Based Long Range Remote Control: Project Work ONDokumen42 halamanFM Based Long Range Remote Control: Project Work ONVenkatesh DoppalapudiBelum ada peringkat
- Report (1) (2) Anti Loss DeviceDokumen18 halamanReport (1) (2) Anti Loss DeviceakshayBelum ada peringkat
- Report On Scrolling Led Board Using 8051Dokumen13 halamanReport On Scrolling Led Board Using 8051harsha vardhan satyanaryanaBelum ada peringkat
- Project Report On Microcontroller Based Traffic Light Controller.Dokumen22 halamanProject Report On Microcontroller Based Traffic Light Controller.Ayan Samanta80% (10)
- Harsh AlDokumen81 halamanHarsh AlSmit VahalkarBelum ada peringkat
- Report Fire AlarmDokumen33 halamanReport Fire AlarmakshayBelum ada peringkat
- MS Mid-Term Presentation (K-18EL101)Dokumen15 halamanMS Mid-Term Presentation (K-18EL101)Noor SabaBelum ada peringkat
- 8051 Microcontroller Based RFID Car Parking SystemDokumen4 halaman8051 Microcontroller Based RFID Car Parking SystemRahul AwariBelum ada peringkat
- Jesmi MiniProjectDokumen31 halamanJesmi MiniProjectAayush SthaBelum ada peringkat
- School of Electrical Engineering: The University of Faisalabad, Faisalabad, PakistanDokumen12 halamanSchool of Electrical Engineering: The University of Faisalabad, Faisalabad, PakistanSHAROON SARDAR GHULAMBelum ada peringkat
- Team 4 Technical ReportDokumen12 halamanTeam 4 Technical Reportabdelrahmanmoataz0Belum ada peringkat
- Radha Govind Engineering College, MeerutDokumen19 halamanRadha Govind Engineering College, MeerutHarshit SharmaBelum ada peringkat
- Microprocessor and Interfacing CSE-2006: TOPIC - Water Level Indicator Using 8051 MicrocontrollerDokumen13 halamanMicroprocessor and Interfacing CSE-2006: TOPIC - Water Level Indicator Using 8051 MicrocontrollerPrayBelum ada peringkat
- EC334 Microcontrollers Lab-Manual FinalDokumen52 halamanEC334 Microcontrollers Lab-Manual FinalSanjid ElahiBelum ada peringkat
- Final Year Project ReportDokumen14 halamanFinal Year Project ReportARPAN GHOSHBelum ada peringkat
- SensorprojectDokumen19 halamanSensorprojectMoulindu SahaBelum ada peringkat
- Project ReviewDokumen17 halamanProject ReviewSiva KumarBelum ada peringkat
- 8Ch Relay PDFDokumen8 halaman8Ch Relay PDFFandi DwiBelum ada peringkat
- Electronics Sem - 4 Gtu SyllabusDokumen19 halamanElectronics Sem - 4 Gtu SyllabusKarishma SavBelum ada peringkat
- Department of Electronics and Communication Engineering Faculty of Engineering and Technology, SRM ISTDokumen6 halamanDepartment of Electronics and Communication Engineering Faculty of Engineering and Technology, SRM ISTAnjali ShankarBelum ada peringkat
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsDari EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsBelum ada peringkat
- Modern Component Families and Circuit Block DesignDari EverandModern Component Families and Circuit Block DesignPenilaian: 5 dari 5 bintang5/5 (1)
- Microprocessors & their Operating Systems: A Comprehensive Guide to 8, 16 & 32 Bit Hardware, Assembly Language & Computer ArchitectureDari EverandMicroprocessors & their Operating Systems: A Comprehensive Guide to 8, 16 & 32 Bit Hardware, Assembly Language & Computer ArchitecturePenilaian: 1 dari 5 bintang1/5 (1)
- 42BYGH SeriesDokumen2 halaman42BYGH SeriesBeni SaputraBelum ada peringkat
- Hake ViscoTester VT550Dokumen6 halamanHake ViscoTester VT550Jiral PatelBelum ada peringkat
- 103H6701 0140 SanyoDenkiDokumen2 halaman103H6701 0140 SanyoDenkiADRIANO SILVABelum ada peringkat
- Engineering Failure Analysis: SciencedirectDokumen12 halamanEngineering Failure Analysis: SciencedirectTarun KumarBelum ada peringkat
- Experiment #09 Stepper Motor Interfacing With Arduino/ Microcontroller Energy ObjectivesDokumen8 halamanExperiment #09 Stepper Motor Interfacing With Arduino/ Microcontroller Energy ObjectivesAyaz FaisalBelum ada peringkat
- Stepper MotorDokumen9 halamanStepper MotorHasan Mahmood100% (1)
- Instruction Manual: QS Series Stepper Motor Driver QS-10N QS-10P QS-10HDokumen10 halamanInstruction Manual: QS Series Stepper Motor Driver QS-10N QS-10P QS-10HNhậtQuangNguyễn100% (1)
- Isystem Hardware: Robotics: Screen 1Dokumen9 halamanIsystem Hardware: Robotics: Screen 1Francisco Rodriguez CozarBelum ada peringkat
- PWMDokumen17 halamanPWMSwarnalatha Radhakrishnan100% (2)
- Stepper Driver r202-42 enDokumen2 halamanStepper Driver r202-42 enjosefkrejcarekBelum ada peringkat
- MS-L3P-L4P Servo-Stepper DriverDokumen9 halamanMS-L3P-L4P Servo-Stepper DriverAsistencia Técnica JLFBelum ada peringkat
- Bipolar Stepper MotorDokumen3 halamanBipolar Stepper Motordirty_harry1992Belum ada peringkat
- Sensors and Actuator NotesDokumen5 halamanSensors and Actuator NotesSatya SinhaBelum ada peringkat
- 'Bahria University, Islamabad: Name: - EnrolmentDokumen3 halaman'Bahria University, Islamabad: Name: - EnrolmentHumza ZahidBelum ada peringkat
- Bee Solved 2019Dokumen26 halamanBee Solved 2019UkashaBelum ada peringkat
- Datasheet Motor PapDokumen1 halamanDatasheet Motor PapMarcos Garcia YsuizaBelum ada peringkat
- VIISemester2016-2017ODD - Handbook - EEE PDFDokumen126 halamanVIISemester2016-2017ODD - Handbook - EEE PDFsaiBelum ada peringkat
- RF Operated Swimming Bot With Pick & Place FacilityDokumen11 halamanRF Operated Swimming Bot With Pick & Place FacilityVijayKumarVijayBelum ada peringkat
- Make A CNC Hot Wire Foam Cutter - CNCDokumen17 halamanMake A CNC Hot Wire Foam Cutter - CNCKem SorrellBelum ada peringkat
- EE311 Electric Drives Control For Automation PDFDokumen2 halamanEE311 Electric Drives Control For Automation PDFAmalBelum ada peringkat
- Fundamentals of Mechatronics: Mechanical Actuators, Electrical Actuators, Hydraulic and Pneumatic ActuatorsDokumen39 halamanFundamentals of Mechatronics: Mechanical Actuators, Electrical Actuators, Hydraulic and Pneumatic Actuatorsanuhas wanigasekaraBelum ada peringkat
- EE 2403 SPECIAL ELECTRICAL MACHINES Regulation 2008 SyllabusDokumen1 halamanEE 2403 SPECIAL ELECTRICAL MACHINES Regulation 2008 SyllabusMuruga RajBelum ada peringkat
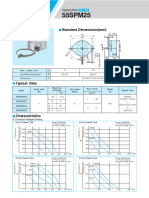
- 55SPM25Dokumen2 halaman55SPM25ouldmanBelum ada peringkat
- Stepper Motor: Stepping Motors Step MotorsDokumen6 halamanStepper Motor: Stepping Motors Step MotorsShoaib KhanBelum ada peringkat
- Linear Stepper MotorsDokumen3 halamanLinear Stepper MotorsmichaelguzziBelum ada peringkat
- MODULE-5: Interfacing: Microcontroller Notes:18EE52Dokumen51 halamanMODULE-5: Interfacing: Microcontroller Notes:18EE52SuprithaBelum ada peringkat
- CNCDesign Coil Winder Software Manual V1 2 PDFDokumen46 halamanCNCDesign Coil Winder Software Manual V1 2 PDFDeaferrant50% (2)
- Stepper Motor Controller Using 8051Dokumen37 halamanStepper Motor Controller Using 8051gutzz0079197100% (2)
- Paper Presentation On Detection by RADAR byDokumen4 halamanPaper Presentation On Detection by RADAR byJanmayjay SwetankBelum ada peringkat
- Gear Clock Assembly Instructions and User Guide: Rev 1.0 February 2010Dokumen55 halamanGear Clock Assembly Instructions and User Guide: Rev 1.0 February 2010Thomas SmithBelum ada peringkat