Anda mungkin juga menyukai
- Respuesta en el tiempo de sistemas de 1o ordenDokumen27 halamanRespuesta en el tiempo de sistemas de 1o ordenMiguel GuerreroBelum ada peringkat
- DETECCION-SENSORESDokumen17 halamanDETECCION-SENSORESMiguel GuerreroBelum ada peringkat
- Practica 2 Laboratorio Teoria de Control y Robotica FescDokumen7 halamanPractica 2 Laboratorio Teoria de Control y Robotica FescDelgado Hernández DanielBelum ada peringkat
- Previo 3 de Teoria de Control y RoboticaDokumen8 halamanPrevio 3 de Teoria de Control y Roboticajorge hernandezBelum ada peringkat
- Previo Práctica 5Dokumen4 halamanPrevio Práctica 5Alejandro Garcia Perez0% (1)
- Previo 3 TCyRDokumen6 halamanPrevio 3 TCyRJan García100% (1)
- Practica 2 Electronica BasicaDokumen12 halamanPractica 2 Electronica BasicaMiguel GuerreroBelum ada peringkat
- Practica 1 Labo Teoria de Control y RoboticaDokumen9 halamanPractica 1 Labo Teoria de Control y RoboticaMiguel GuerreroBelum ada peringkat
- Practica 2TCyR FESCDokumen9 halamanPractica 2TCyR FESCCarlos SanchezBelum ada peringkat
- Reporte 5 TCyRDokumen7 halamanReporte 5 TCyRJan GarcíaBelum ada peringkat
- Practica No.3 Labo. Máquinas TérmicasDokumen14 halamanPractica No.3 Labo. Máquinas TérmicasJoshua A. Ruiz Ramírez0% (1)
- Práctica 7 Aire Acondicionado BienDokumen9 halamanPráctica 7 Aire Acondicionado BienAnaPatriciaCardenasQuezadaBelum ada peringkat
- Laboratorio de Máquinas Térmicas: Práctica 4Dokumen8 halamanLaboratorio de Máquinas Térmicas: Práctica 4John R. Dos PassosBelum ada peringkat
- Previo No.2 (Detección Mediante Sensores)Dokumen9 halamanPrevio No.2 (Detección Mediante Sensores)Noeli R100% (1)
- Previo Practica 3 Electronica Basica (Venegas Mendoza Javier Adrian)Dokumen3 halamanPrevio Practica 3 Electronica Basica (Venegas Mendoza Javier Adrian)Javier VenegasBelum ada peringkat
- Practica 5 Labo Teoria de ControlDokumen17 halamanPractica 5 Labo Teoria de ControlMiguel Guerrero100% (1)
- Reporte 7 TCyRDokumen6 halamanReporte 7 TCyRJan GarcíaBelum ada peringkat
- Previo 4 TCyRDokumen4 halamanPrevio 4 TCyRJan GarcíaBelum ada peringkat
- Previo 5 Laboratorio de Electronica BasicaDokumen3 halamanPrevio 5 Laboratorio de Electronica BasicaMiguel Guerrero100% (1)
- UNAM-FES Cuautitlán Teoremas básicos electrónica previoDokumen10 halamanUNAM-FES Cuautitlán Teoremas básicos electrónica previoTupapito100% (1)
- Practica No.1 (Lab. Control Electromecánico)Dokumen10 halamanPractica No.1 (Lab. Control Electromecánico)Alexis MuñozBelum ada peringkat
- Practica No.1 Labo. Máquinas TérmicasDokumen13 halamanPractica No.1 Labo. Máquinas TérmicasJoshua A. Ruiz RamírezBelum ada peringkat
- Practica 6 TEORIA DE CONTROLDokumen11 halamanPractica 6 TEORIA DE CONTROLMiguel GuerreroBelum ada peringkat
- Practica 9Dokumen14 halamanPractica 9Miguel GuerreroBelum ada peringkat
- Previo 6 Laboratorio de Electronica BasicaDokumen4 halamanPrevio 6 Laboratorio de Electronica BasicaMiguel GuerreroBelum ada peringkat
- Practica 3 PDFDokumen28 halamanPractica 3 PDFMiguel Guerrero100% (2)
- Practica No.2 Labo. Máquinas TérmicasDokumen9 halamanPractica No.2 Labo. Máquinas TérmicasJoshua A. Ruiz RamírezBelum ada peringkat
- Previo 7 Laboratorio de Electronica BasicaDokumen5 halamanPrevio 7 Laboratorio de Electronica BasicaMiguel GuerreroBelum ada peringkat
- Practica No.2 Labo. Mecanica de FluidosDokumen18 halamanPractica No.2 Labo. Mecanica de FluidosJoshua A. Ruiz RamírezBelum ada peringkat
- 1-10 Practicas de Maquinas TermicasDokumen91 halaman1-10 Practicas de Maquinas TermicasSalvador Hernandez Colorado100% (1)
- Laboratorio de Mecánica de Fluidos: Curva característica del ventiladorDokumen22 halamanLaboratorio de Mecánica de Fluidos: Curva característica del ventiladorDavid Pineda Mares100% (2)
- Practica No. 6 (Parametros de Lectura de Un Sistema Trifasico)Dokumen5 halamanPractica No. 6 (Parametros de Lectura de Un Sistema Trifasico)Alexis Muñoz100% (1)
- PRACTICA7 Generador en Derivacion de CD Con AutoexcitacionDokumen11 halamanPRACTICA7 Generador en Derivacion de CD Con AutoexcitacionJavier Alejandro Guzman ReyesBelum ada peringkat
- Practica 1 Sincronas Ime FescDokumen8 halamanPractica 1 Sincronas Ime FescDiego RGBelum ada peringkat
- SERIE1 Parte2Dokumen24 halamanSERIE1 Parte2moniBelum ada peringkat
- Practica 6 Maquinas Termicas UnamDokumen10 halamanPractica 6 Maquinas Termicas UnamMiguel Guerrero100% (1)
- Práctica 2 Polaridad Del TransformadorDokumen8 halamanPráctica 2 Polaridad Del TransformadormiguelBelum ada peringkat
- Medir Sistema Monofásico con Analizador Energía PR300Dokumen6 halamanMedir Sistema Monofásico con Analizador Energía PR300Alexis Muñoz100% (1)
- Turbina Pelton UNAM CuautitlánDokumen18 halamanTurbina Pelton UNAM CuautitlánJorch HC100% (1)
- Practica 3 Mecánica de Fluidos UNAMDokumen9 halamanPractica 3 Mecánica de Fluidos UNAMVictor Ivan Andrade PradoBelum ada peringkat
- Practica 5Dokumen7 halamanPractica 5Miguel Guerrero100% (1)
- Previo 3 Electronica BasicaDokumen3 halamanPrevio 3 Electronica BasicaMiguel GuerreroBelum ada peringkat
- Practica 7 PDF Laboratorio de Teoria de Control y Robotica UnamDokumen12 halamanPractica 7 PDF Laboratorio de Teoria de Control y Robotica UnamMiguel GuerreroBelum ada peringkat
- Introducción Al Sistema de Simulación de Circuitos ElectrónicosDokumen7 halamanIntroducción Al Sistema de Simulación de Circuitos ElectrónicosAxl Gutiérrez100% (1)
- Practica 2 RevenidoDokumen7 halamanPractica 2 RevenidoJosé Luis Ang SotoBelum ada peringkat
- Práctica 3 EBDokumen10 halamanPráctica 3 EBJorge Daniel MercadoBelum ada peringkat
- Practica N0 6Dokumen9 halamanPractica N0 6Daniel Omar CorreaBelum ada peringkat
- Lab de Fluidos 5Dokumen11 halamanLab de Fluidos 5BrandonFuentesJuarez100% (1)
- Practica#3, Calidad Del VaporobjetivoDokumen7 halamanPractica#3, Calidad Del VaporobjetivoJavier Alejandro Guzman ReyesBelum ada peringkat
- Previo 8 Laboratorio de Electronica BasicaDokumen7 halamanPrevio 8 Laboratorio de Electronica BasicaMiguel GuerreroBelum ada peringkat
- Practica 4Dokumen12 halamanPractica 4Miguel GuerreroBelum ada peringkat
- Practica 8 LABO DE TEORIA DE CONTROL UNAMDokumen14 halamanPractica 8 LABO DE TEORIA DE CONTROL UNAMMiguel GuerreroBelum ada peringkat
- Sistemas de Primer OrdenDokumen15 halamanSistemas de Primer OrdenjavierBelum ada peringkat
- Análisis temporal de sistemas continuos: respuesta escalón y especificaciones transitoriasDokumen56 halamanAnálisis temporal de sistemas continuos: respuesta escalón y especificaciones transitoriasJuan GallardoBelum ada peringkat
- Icc Uni 3Dokumen17 halamanIcc Uni 3marcos calixtoBelum ada peringkat
- Guion de Clase # 3.analisis de La Respuesta Transitoria.Dokumen7 halamanGuion de Clase # 3.analisis de La Respuesta Transitoria.Alexander MendezBelum ada peringkat
- Análisis de la respuesta temporal de sistemas de segundo ordenDokumen42 halamanAnálisis de la respuesta temporal de sistemas de segundo ordenJuan Camilo NaranjoBelum ada peringkat
- Entrada Tipo ParabolaDokumen28 halamanEntrada Tipo ParabolaJuan Camilo NaranjoBelum ada peringkat
- Señales de EntradaDokumen34 halamanSeñales de EntradaJuan Camilo NaranjoBelum ada peringkat
- Evaluacion Por Puntos Eon MotorsDokumen10 halamanEvaluacion Por Puntos Eon MotorsMiguel GuerreroBelum ada peringkat
- Organigrama Eon MotorsDokumen1 halamanOrganigrama Eon MotorsMiguel GuerreroBelum ada peringkat
- PRESENTACIONDokumen82 halamanPRESENTACIONMiguel GuerreroBelum ada peringkat
- Actividad 3 Balance GeneralDokumen2 halamanActividad 3 Balance GeneralMiguel GuerreroBelum ada peringkat
- Manual de Acceso A Platafoma H@bitat PUMADokumen5 halamanManual de Acceso A Platafoma H@bitat PUMAMiguel GuerreroBelum ada peringkat
- 6 - Método Evaluación Por Puntos Ejercicio ParticipanteDokumen11 halaman6 - Método Evaluación Por Puntos Ejercicio ParticipanteMiguel GuerreroBelum ada peringkat
- 3 Grid GerencialDokumen1 halaman3 Grid GerencialMiguel GuerreroBelum ada peringkat
- Actividad 1 Clasificacion de CuentasDokumen1 halamanActividad 1 Clasificacion de CuentasMiguel Guerrero100% (1)
- Entregable Modulo 6Dokumen29 halamanEntregable Modulo 6Miguel GuerreroBelum ada peringkat
- Entregable Modulo 6Dokumen29 halamanEntregable Modulo 6Miguel GuerreroBelum ada peringkat
- Formato UnicoDokumen2 halamanFormato Unicoiszsabellaa100% (2)
- Actividad 2 Decisiones ContablesDokumen1 halamanActividad 2 Decisiones ContablesMiguel GuerreroBelum ada peringkat
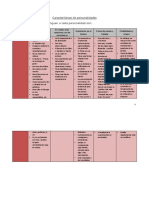
- Caracteristicas PersonalidadesDokumen6 halamanCaracteristicas PersonalidadesMiguel GuerreroBelum ada peringkat
- DocumentDokumen4 halamanDocumentMiguel GuerreroBelum ada peringkat
- LiverpoolDokumen6 halamanLiverpoolMiguel GuerreroBelum ada peringkat
- Transistor 2 EjercicioDokumen7 halamanTransistor 2 EjercicioMiguel GuerreroBelum ada peringkat
- Entregable Del Modulo ViDokumen1 halamanEntregable Del Modulo ViMiguel GuerreroBelum ada peringkat
- Problema 12-165Dokumen1 halamanProblema 12-165Miguel GuerreroBelum ada peringkat
- Guía Mercado ForexDokumen24 halamanGuía Mercado Forexzaccaro_86Belum ada peringkat
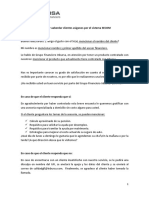
- Clientes SecomDokumen1 halamanClientes SecomMiguel GuerreroBelum ada peringkat
- Manual BancoDokumen109 halamanManual BancoMiguel GuerreroBelum ada peringkat
- Solicitud AutotalDokumen6 halamanSolicitud AutotalMiguel GuerreroBelum ada peringkat
- Pagar examen ENES-CIE en BBVA BancomerDokumen1 halamanPagar examen ENES-CIE en BBVA BancomerMiguel GuerreroBelum ada peringkat
- Mi Empresa en Unas LineasDokumen1 halamanMi Empresa en Unas LineasMiguel GuerreroBelum ada peringkat
- Carta de Presentacion VOLVODokumen1 halamanCarta de Presentacion VOLVOMiguel GuerreroBelum ada peringkat
- TEMAIIDokumen3 halamanTEMAIIMiguel GuerreroBelum ada peringkat
- Carta de Presentacion FORDDokumen1 halamanCarta de Presentacion FORDMiguel GuerreroBelum ada peringkat
- Ejercicio Transistores 2Dokumen7 halamanEjercicio Transistores 2Miguel GuerreroBelum ada peringkat
- Temaiii 1Dokumen9 halamanTemaiii 1Miguel GuerreroBelum ada peringkat
- Ejercicio TransistoresDokumen7 halamanEjercicio TransistoresMiguel GuerreroBelum ada peringkat
- Anexo 3 - Actividad de Nivelación E2 y E3 PDFDokumen4 halamanAnexo 3 - Actividad de Nivelación E2 y E3 PDFKevin Duban Aguilar VargasBelum ada peringkat
- Filtro FIR ReporteDokumen17 halamanFiltro FIR ReporteCarlos MelchorBelum ada peringkat
- Transformada LaplaceDokumen9 halamanTransformada LaplaceAndres AguazacoBelum ada peringkat
- Introducción a Simulink: Guía de inicioDokumen28 halamanIntroducción a Simulink: Guía de inicioDani BielsaBelum ada peringkat
- Tarea3 Grupo203042 40Dokumen36 halamanTarea3 Grupo203042 40angi baronBelum ada peringkat
- Sist Control Autom v5.0Dokumen97 halamanSist Control Autom v5.0Mariza BritoBelum ada peringkat
- Diagramas de Bloques-ClasesDokumen45 halamanDiagramas de Bloques-ClasesAnonymous MhuINvODnBelum ada peringkat
- GuiaEjercicios 5Dokumen14 halamanGuiaEjercicios 5Rywer Luna choqueBelum ada peringkat
- Tema 3 SMRDokumen66 halamanTema 3 SMRflano273Belum ada peringkat
- Diagrama de BloquesDokumen13 halamanDiagrama de Bloquesjesus antepazBelum ada peringkat
- Ingenieria de ControlDokumen7 halamanIngenieria de ControlStälin FlöggersîtöBelum ada peringkat
- Lab3 SandovalDokumen12 halamanLab3 SandovalFELIPE CAMILO SANDOVAL PAINENBelum ada peringkat
- Lab Nº4 - TZ - V2022 - ParDokumen3 halamanLab Nº4 - TZ - V2022 - ParWerner Vega AscuňaBelum ada peringkat
- Investigación Control IIDokumen87 halamanInvestigación Control IImario gomezBelum ada peringkat
- Función de transferencia circuito RCDokumen18 halamanFunción de transferencia circuito RCArthur Santiago TostadoBelum ada peringkat
- 1 Técnicas de Control para Sistemas SISO No Clásicos - (YA)Dokumen28 halaman1 Técnicas de Control para Sistemas SISO No Clásicos - (YA)tirat_aunpozoBelum ada peringkat
- SILABODokumen6 halamanSILABOWilmer More PalominoBelum ada peringkat
- Sist. de Control Discreto IIDokumen141 halamanSist. de Control Discreto IIEstephany Morales BermudesBelum ada peringkat
- Señales y SistemasDokumen10 halamanSeñales y SistemasYafeth De Jesús Ramos CañizaresBelum ada peringkat
- SimulinkDokumen50 halamanSimulinkIsmael Fco100% (1)
- Tarea N°2 de ControlDokumen14 halamanTarea N°2 de ControlJohn SalchiconBelum ada peringkat
- INGENIERIA DE CONTROL: SILABO DEL CURSODokumen152 halamanINGENIERIA DE CONTROL: SILABO DEL CURSOChristian Vasquez Medrano100% (1)
- 3 Estabilidad Discreta Transferencia PulsoDokumen9 halaman3 Estabilidad Discreta Transferencia PulsoDANIEL DIAZBelum ada peringkat
- Libro Tratamiento Digital de SeñalesDokumen378 halamanLibro Tratamiento Digital de SeñalesJesus Villamil100% (2)
- Dinamica de Sistemas de Control, Variable de Estado, Cap 2Dokumen17 halamanDinamica de Sistemas de Control, Variable de Estado, Cap 2Tony YespaBelum ada peringkat
- Lab 2. Curva Característica de Un Proceso y Parámetros de Un Proceso de Primer Orden.Dokumen10 halamanLab 2. Curva Característica de Un Proceso y Parámetros de Un Proceso de Primer Orden.Pedro Luis Contreras EgusquizaBelum ada peringkat
- Respuesta en El Tiempo de Un Sistema de ControlDokumen26 halamanRespuesta en El Tiempo de Un Sistema de ControlMIGUEL ANGEL QUIMBITA PANCHIBelum ada peringkat
- Fase 1 Reconocer Señales de Prueba en FuncionesDokumen8 halamanFase 1 Reconocer Señales de Prueba en Funcionesjorge640908Belum ada peringkat
- Señales y Sistemas II: Resolución de Problemas de Primer ParcialDokumen2 halamanSeñales y Sistemas II: Resolución de Problemas de Primer ParcialAndresAvilanBelum ada peringkat