Anda mungkin juga menyukai
- Controladores Lógico Programable: Simulación de circuitos de control, potencia y programación LadderDokumen14 halamanControladores Lógico Programable: Simulación de circuitos de control, potencia y programación Laddernohemy condo machaca100% (1)
- Controladores AutosintonizablesDokumen24 halamanControladores AutosintonizablesJose Antonio PinGlo MarkzBelum ada peringkat
- Go30 Manual PDFDokumen11 halamanGo30 Manual PDFCarlosBelum ada peringkat
- LABORATORIO N°3 PARTE 2 - Grupo 5Dokumen9 halamanLABORATORIO N°3 PARTE 2 - Grupo 5MARTIN ZAPANABelum ada peringkat
- AscensorDokumen6 halamanAscensorfernando0% (1)
- Automatización Industrial: Práctica 3Dokumen8 halamanAutomatización Industrial: Práctica 3pacol123Belum ada peringkat
- AutomatizacionesDokumen3 halamanAutomatizacionescarlos4mora-7Belum ada peringkat
- AutomatizacionDokumen3 halamanAutomatizacionJuan David Franco FrancoBelum ada peringkat
- Examen Parcial - Preguntas para ResolverDokumen5 halamanExamen Parcial - Preguntas para ResolverAV Milagros100% (1)
- Reporte Proyecto Final Automatizacion de TolvasDokumen10 halamanReporte Proyecto Final Automatizacion de TolvasAlejandro GuerreroBelum ada peringkat
- Laboratorio 10 - Topologia de Red1.1Dokumen14 halamanLaboratorio 10 - Topologia de Red1.1edwin floresBelum ada peringkat
- Guia 4 PLC (LADDER)Dokumen6 halamanGuia 4 PLC (LADDER)JOHAN SEBASTIAN SUAREZ VALENCIABelum ada peringkat
- Laboratorio n11 Sensores de Temperatura Tipo K y RTD Sensor de Presion 1 PDFDokumen6 halamanLaboratorio n11 Sensores de Temperatura Tipo K y RTD Sensor de Presion 1 PDFJohannManuelBelum ada peringkat
- AP3. SMR2. Montaje y Desarrollo de Un Detector Inductivo de 3 HilosDokumen1 halamanAP3. SMR2. Montaje y Desarrollo de Un Detector Inductivo de 3 HilosPatriciaBlázquezGarcíaBelum ada peringkat
- Act. Sem2Dokumen3 halamanAct. Sem2Leimer Martinez Pinto100% (1)
- Actuadores - Grupo 9-Sesión03Dokumen10 halamanActuadores - Grupo 9-Sesión03Ma JeBelum ada peringkat
- Pracctica 4 Timer y ContadorDokumen8 halamanPracctica 4 Timer y ContadorSarai Mendez MeloBelum ada peringkat
- Informe #03 de Control de Motores (Porton, Semaforo y Ascensor)Dokumen14 halamanInforme #03 de Control de Motores (Porton, Semaforo y Ascensor)Leisy SpitiaBelum ada peringkat
- Banco de PreguntasDokumen6 halamanBanco de PreguntasGabriela C. MirandaBelum ada peringkat
- Trabajo Final 2P Embotellado PLC NRC2681 Equipo 6Dokumen9 halamanTrabajo Final 2P Embotellado PLC NRC2681 Equipo 6CFPerezBelum ada peringkat
- Práctica #9 - Automatización IndustrialDokumen6 halamanPráctica #9 - Automatización IndustrialKEvinLalanGuiBelum ada peringkat
- Traduccion VirtualmarkTCPDokumen4 halamanTraduccion VirtualmarkTCPFrancisco MendozaBelum ada peringkat
- Control automático elementosDokumen41 halamanControl automático elementosdanielaBelum ada peringkat
- Manual ControladorDokumen7 halamanManual Controladoralex100pre100% (1)
- Sistema de Llenado Automatico de AguaDokumen16 halamanSistema de Llenado Automatico de AguaFreddyLMBelum ada peringkat
- PLC AvanzadoDokumen32 halamanPLC AvanzadoCristian Giovanni Gomez ParadaBelum ada peringkat
- Sensores de ContactoDokumen10 halamanSensores de ContactoJuan CarlosBelum ada peringkat
- Control de Nivel de Un Tanque Con Dos SensoresDokumen5 halamanControl de Nivel de Un Tanque Con Dos Sensoresotakun100% (1)
- Guia Lab3 SensoresDokumen11 halamanGuia Lab3 SensoresRonaldoBelum ada peringkat
- PNOZ XV2 Operating Manual 19438-ES-11Dokumen29 halamanPNOZ XV2 Operating Manual 19438-ES-11Gilberto Domingo Corrales AmesBelum ada peringkat
- f67357728 Control de Servo Motor Con PIC 16F84 y LabViewDokumen5 halamanf67357728 Control de Servo Motor Con PIC 16F84 y LabViewRonald Duéñez OrtizBelum ada peringkat
- Taller - 4 Aplicaciones Con RSLOGIX5000 Control ContinuoDokumen9 halamanTaller - 4 Aplicaciones Con RSLOGIX5000 Control ContinuoJulio Ce CBelum ada peringkat
- CMV Manual de operación y prácticas del centro de maquinado verticalDokumen204 halamanCMV Manual de operación y prácticas del centro de maquinado verticalPeter GonzalesBelum ada peringkat
- Detector de ObjetosDokumen17 halamanDetector de ObjetosDaniel Torres Quispe100% (1)
- Lab 4. Ingeniería Básica Alcance, Programación y CostoDokumen15 halamanLab 4. Ingeniería Básica Alcance, Programación y CostoAlex ChuctayaBelum ada peringkat
- 10 Selección de PIADokumen2 halaman10 Selección de PIACarlos Gleen FerreiroBelum ada peringkat
- Depósito de Agua Teoría PreviaDokumen8 halamanDepósito de Agua Teoría PreviaMARCO2XXXBelum ada peringkat
- Control Electrónico Del Equipo Pesado Lap 7Dokumen11 halamanControl Electrónico Del Equipo Pesado Lap 7Jordy Jonatan Ramos GasparBelum ada peringkat
- Guia 1 - Crear Un Proyecto Con Tia PortalDokumen4 halamanGuia 1 - Crear Un Proyecto Con Tia PortalAlejandro LeonBelum ada peringkat
- 05 Sensores FotoelectricosDokumen13 halaman05 Sensores FotoelectricosFran FranBelum ada peringkat
- Reporte de Examen VII - Inversor de Giro de Un Motor TrifásicoDokumen30 halamanReporte de Examen VII - Inversor de Giro de Un Motor TrifásicoOscar Manuel Quiroz De La Vega50% (2)
- TEMA 3. Programación de Robots Ejercicios Solucion - OCWDokumen5 halamanTEMA 3. Programación de Robots Ejercicios Solucion - OCWmarivel ochoa cortezBelum ada peringkat
- Clase 3 Esquemas EléctricosDokumen44 halamanClase 3 Esquemas EléctricosfranklingiovanniBelum ada peringkat
- LAB 3 SIC NeumaticaIDokumen7 halamanLAB 3 SIC NeumaticaInkBelum ada peringkat
- Guia IVDokumen7 halamanGuia IVFranklin Turpo HuallipeBelum ada peringkat
- Túnel de Lavado AutomáticoDokumen1 halamanTúnel de Lavado AutomáticoArnol Sayas ZubietaBelum ada peringkat
- PLC Control DiscretoDokumen7 halamanPLC Control DiscretoSofia DelgadoBelum ada peringkat
- Control GarajeDokumen4 halamanControl GarajeDaniel Toroche100% (1)
- Proyecto Final Automatizaci N IndustrialDokumen15 halamanProyecto Final Automatizaci N IndustrialIsa ReyesBelum ada peringkat
- Informe PLCDokumen10 halamanInforme PLCSebastian SanchezBelum ada peringkat
- Módulo de Entrenamiento de Maniobras Eléctricas: Circuitos de Control y Seguridad EléctricaDokumen47 halamanMódulo de Entrenamiento de Maniobras Eléctricas: Circuitos de Control y Seguridad EléctricaERICK ARMANDO ALEGRIA ACEVEDOBelum ada peringkat
- Unit5 - Akbar Naufal Makarim - 40040318650039Dokumen18 halamanUnit5 - Akbar Naufal Makarim - 40040318650039sisilain profesor100% (1)
- Ejercicios S7 1200 - para AIDokumen5 halamanEjercicios S7 1200 - para AIPérez De la Fuente José DavidBelum ada peringkat
- Awl PDFDokumen30 halamanAwl PDFEdo RossBelum ada peringkat
- Televisión digital y telecomunicaciones en comunidades de propietariosDari EverandTelevisión digital y telecomunicaciones en comunidades de propietariosBelum ada peringkat
- EJER T5 Instalaciones Domóticas Autómatas ProgramablesDokumen7 halamanEJER T5 Instalaciones Domóticas Autómatas ProgramablestrunkslvlBelum ada peringkat
- Informe Proyecto Final Lab Control 1Dokumen5 halamanInforme Proyecto Final Lab Control 1Andres Felipe GBelum ada peringkat
- Proyecto PLCDokumen11 halamanProyecto PLCanthony3alvarez3ovieBelum ada peringkat
- Laberinto robotDokumen8 halamanLaberinto robotAnonymous vzsPCPDF6bBelum ada peringkat
- Practicas Circuitos DIgitales-Luis UrdanetaDokumen102 halamanPracticas Circuitos DIgitales-Luis UrdanetaLuis D. Urdaneta G.100% (3)
- Control Electrico 2Dokumen7 halamanControl Electrico 2GuardiaBelum ada peringkat
- Electricidad 1Dokumen6 halamanElectricidad 1GuardiaBelum ada peringkat
- Control Electrico 5Dokumen2 halamanControl Electrico 5GuardiaBelum ada peringkat
- Control Electrico 4Dokumen2 halamanControl Electrico 4GuardiaBelum ada peringkat
- Control Electrico 3Dokumen4 halamanControl Electrico 3GuardiaBelum ada peringkat
- Usar La Electricidad para Energizar y Hacer Funcionar Muchos Equipos Monófasicos oDokumen19 halamanUsar La Electricidad para Energizar y Hacer Funcionar Muchos Equipos Monófasicos oGuardiaBelum ada peringkat
- CCTVDokumen17 halamanCCTVGuardiaBelum ada peringkat
- Circuitos de Ladder ZelioDokumen4 halamanCircuitos de Ladder ZelionarutoBelum ada peringkat
- AsdadasDokumen11 halamanAsdadasGuardiaBelum ada peringkat
- Tecnología de FabricaciónDokumen23 halamanTecnología de FabricaciónGuardiaBelum ada peringkat
- Tarea1 2parcial Investigación UberBaque 15.12.2022Dokumen5 halamanTarea1 2parcial Investigación UberBaque 15.12.2022Uber Baque AlmeidaBelum ada peringkat
- Cicloconvertidor ComercialDokumen25 halamanCicloconvertidor ComercialCarlos Asem100% (1)
- PLC 01 03 Entradas y SalidasDokumen27 halamanPLC 01 03 Entradas y SalidasCHESEDBelum ada peringkat
- Material Sistemas Monitoreo CaterpillarDokumen31 halamanMaterial Sistemas Monitoreo CaterpillarestesgfeBelum ada peringkat
- Salidas Analógicas S7Dokumen5 halamanSalidas Analógicas S7Angela EscateBelum ada peringkat
- Pico Controller programable ideal aplicaciones PLC exageradoDokumen94 halamanPico Controller programable ideal aplicaciones PLC exageradoFranco LudueñaBelum ada peringkat
- Unidad 1Dokumen63 halamanUnidad 1RobertLopezFudoBelum ada peringkat
- OSCILOSCOPIO InformeDokumen36 halamanOSCILOSCOPIO Informeestefano ochoaBelum ada peringkat
- Multilim 350 Capitulo 2Dokumen17 halamanMultilim 350 Capitulo 2GuillermoAlejandroCajal100% (1)
- Informe Laboratorio de ElectronicaDokumen14 halamanInforme Laboratorio de ElectronicaAlex SalazarBelum ada peringkat
- Cap01-Sistemas y SeñalesDokumen38 halamanCap01-Sistemas y SeñalesFREDERICK QUISPE HIPOLITOBelum ada peringkat
- Dispositivos de Entrada Del ECMDokumen20 halamanDispositivos de Entrada Del ECMDavid TurpoBelum ada peringkat
- Manual de Pinnacle Studio 10Dokumen324 halamanManual de Pinnacle Studio 10Ojitos VerdesBelum ada peringkat
- So-Anexo I-Clasificacion de Las AsDokumen5 halamanSo-Anexo I-Clasificacion de Las AsNico StefanelliBelum ada peringkat
- MICROCONTROLADORES PIC16F690Dokumen13 halamanMICROCONTROLADORES PIC16F690Carlos RomoBelum ada peringkat
- 04-Convertidores AD1Dokumen103 halaman04-Convertidores AD1cesar37dBelum ada peringkat
- Sistema de SeguridadDokumen108 halamanSistema de SeguridadHernández Pérez Jonathan RenéBelum ada peringkat
- Data Sheet Atmega328p Entradas y Salidas en EspañolDokumen16 halamanData Sheet Atmega328p Entradas y Salidas en EspañolJean Pol SegalesBelum ada peringkat
- Control NumericoDokumen58 halamanControl Numericofrankbiker100% (1)
- Conexión de sensores y LED RGB con ArduinoDokumen15 halamanConexión de sensores y LED RGB con ArduinoMauricio GonzalezBelum ada peringkat
- Uso Del Voltimetro y El OsciloscopioDokumen8 halamanUso Del Voltimetro y El OsciloscopioJeferson OlanoBelum ada peringkat
- Informe ADC DACDokumen5 halamanInforme ADC DACNaim RejalBelum ada peringkat
- S111 Introduccion A Los Sistemas de InstrumentacionDokumen36 halamanS111 Introduccion A Los Sistemas de InstrumentacionStefhano Jara MoralesBelum ada peringkat
- Laboratorio PCMDokumen3 halamanLaboratorio PCMJORGE ELIECER MOLINA CERVANTESBelum ada peringkat
- R06D - U1S4 - Inputs, Outputs, DDRDokumen26 halamanR06D - U1S4 - Inputs, Outputs, DDRHugo quiñonesBelum ada peringkat
- Diapositivas - Sesión 6Dokumen24 halamanDiapositivas - Sesión 6Erik Berrospi RodriguezBelum ada peringkat
- Funciones Del Fusible EléctricoDokumen6 halamanFunciones Del Fusible EléctricoAdrian100% (1)
- La Comunicación Hombre-MáquinaDokumen9 halamanLa Comunicación Hombre-MáquinaKyota IshiroBelum ada peringkat
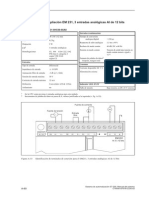
- A.33 Módulo de Ampliación EM 231, 3 Entradas Analógicas AI de 12 BitsDokumen9 halamanA.33 Módulo de Ampliación EM 231, 3 Entradas Analógicas AI de 12 BitsmcsecBelum ada peringkat
- Sico Prone TDokumen38 halamanSico Prone TNéstor Huerta CastilloBelum ada peringkat