Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Hotel Asset Management - Pricipals & PracticesDokumen30 halamanHotel Asset Management - Pricipals & PracticesTrungHa NgoBelum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Housing BOQDokumen149 halamanHousing BOQfaiqkhoso89% (9)
- Ultimate Guide To The PTE Academic SampleDokumen15 halamanUltimate Guide To The PTE Academic SampleRaghunath Reddy61% (38)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Ielts 42 Topics For Speaking Part 1Dokumen32 halamanIelts 42 Topics For Speaking Part 1Zaryab Nisar100% (1)
- Prefab House ProfileDokumen25 halamanPrefab House ProfilespellbindguyBelum ada peringkat
- Objective Fact SheetDokumen6 halamanObjective Fact SheetspellbindguyBelum ada peringkat
- Dinesh Jee PlanDokumen1 halamanDinesh Jee PlanspellbindguyBelum ada peringkat
- Structure of School-ModelDokumen1 halamanStructure of School-ModelspellbindguyBelum ada peringkat
- 20171005011Dokumen1 halaman20171005011spellbindguyBelum ada peringkat
- A2 Ket Vocabulary List PDFDokumen33 halamanA2 Ket Vocabulary List PDFAdriana BialisBelum ada peringkat
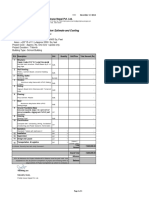
- Detailed Specification/ Estimate and Costing: Prefab House Nepal Pvt. LTDDokumen1 halamanDetailed Specification/ Estimate and Costing: Prefab House Nepal Pvt. LTDspellbindguyBelum ada peringkat
- Thesis Report FinalDokumen75 halamanThesis Report FinalspellbindguyBelum ada peringkat
- For Those Who Are Struggling With CDRDokumen2 halamanFor Those Who Are Struggling With CDRspellbindguyBelum ada peringkat
- 2008 AugustDokumen12 halaman2008 AugustspellbindguyBelum ada peringkat
- Originally Posted byDokumen2 halamanOriginally Posted byspellbindguyBelum ada peringkat
- Detailed Specification/ Estimate and Costing: Prefab House Nepal Pvt. LTDDokumen1 halamanDetailed Specification/ Estimate and Costing: Prefab House Nepal Pvt. LTDspellbindguyBelum ada peringkat
- PDF - EKT 357 Digital Communications - Chapter 5 (Part 1) - UpdateDokumen24 halamanPDF - EKT 357 Digital Communications - Chapter 5 (Part 1) - UpdatespellbindguyBelum ada peringkat
- Random Signals and NoiseDokumen83 halamanRandom Signals and NoisespellbindguyBelum ada peringkat
- O - 3S XDC.T LCL Is A &/0/) IJ - :LDokumen4 halamanO - 3S XDC.T LCL Is A &/0/) IJ - :LspellbindguyBelum ada peringkat
- Salary CitizenDokumen5 halamanSalary CitizenspellbindguyBelum ada peringkat
- ECEN 5682 Theory and Practice of Error Control CodesDokumen56 halamanECEN 5682 Theory and Practice of Error Control CodesspellbindguyBelum ada peringkat
- Concept Note Nepal PanaromicDokumen20 halamanConcept Note Nepal PanaromicspellbindguyBelum ada peringkat
- Salary LettersDokumen4 halamanSalary LettersspellbindguyBelum ada peringkat
- Error Coding: 18-849b Dependable Embedded Systems Charles P. Shelton February 9, 1999Dokumen15 halamanError Coding: 18-849b Dependable Embedded Systems Charles P. Shelton February 9, 1999spellbindguyBelum ada peringkat
- ContentsDokumen7 halamanContentsspellbindguyBelum ada peringkat
- DocDokumen12 halamanDockopljanikBelum ada peringkat
- Air Cargo Shed NoticeDokumen4 halamanAir Cargo Shed NoticespellbindguyBelum ada peringkat
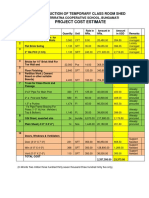
- Construction of Temporary Class Room ShedDokumen2 halamanConstruction of Temporary Class Room ShedspellbindguyBelum ada peringkat
- DetailsDokumen1 halamanDetailsspellbindguyBelum ada peringkat
- Proposal TemplateDokumen15 halamanProposal TemplateFaaiz ShabbirBelum ada peringkat
- MS-7B49-1.1 (Intel - Coffeelake Plamform Z370)Dokumen65 halamanMS-7B49-1.1 (Intel - Coffeelake Plamform Z370)Carlos GomesBelum ada peringkat
- 6es7153 2ba02 0XB0Dokumen3 halaman6es7153 2ba02 0XB0HarunBelum ada peringkat
- 27030422-ACOMT2A04 DatasheetDokumen3 halaman27030422-ACOMT2A04 DatasheetJorge VieiraBelum ada peringkat
- E283C2Dokumen22 halamanE283C2Steven YuBelum ada peringkat
- MOD1 Manual ENDokumen11 halamanMOD1 Manual ENTomy Daniel Ramirez AlvarezBelum ada peringkat
- Error Code Error Cause Elimination E53: 50 650 69 0101E - REV A (GROVE RT-TM) .DOC / Rev. A / 2007-08-17 / RKDokumen1 halamanError Code Error Cause Elimination E53: 50 650 69 0101E - REV A (GROVE RT-TM) .DOC / Rev. A / 2007-08-17 / RKSaraiva EquipamentosBelum ada peringkat
- Ds Esprimo Mobile v6535Dokumen4 halamanDs Esprimo Mobile v6535kasem_beBelum ada peringkat
- PotentiometerDokumen12 halamanPotentiometerkarthikeyan19470% (1)
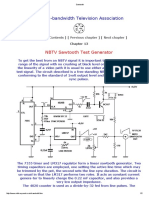
- Narrow Bandwidth Television Association: NBTV Sawtooth Test GeneratorDokumen2 halamanNarrow Bandwidth Television Association: NBTV Sawtooth Test GeneratorSebastian CostaBelum ada peringkat
- Komunikasi Data: TEE 843 - Sistem TelekomunikasiDokumen69 halamanKomunikasi Data: TEE 843 - Sistem Telekomunikasi1A R. Moch Rizky Sunandar SaputraBelum ada peringkat
- VAMP 140. Overcurrent - and Earthfault Relay. Technical Data SheetDokumen20 halamanVAMP 140. Overcurrent - and Earthfault Relay. Technical Data SheetIbrar Hussain100% (1)
- MCP130 300 PDFDokumen16 halamanMCP130 300 PDFdenisandreiBelum ada peringkat
- SPTS 2.3 - Performance Specification For Transformers For Connection To The Company System BETTA-11-004 Issue 1Dokumen9 halamanSPTS 2.3 - Performance Specification For Transformers For Connection To The Company System BETTA-11-004 Issue 1sojib0079Belum ada peringkat
- Aoc f22sDokumen43 halamanAoc f22sJoao Jose Santos NetoBelum ada peringkat
- Presente en PG 26 C Funciona Igual Con Solo 5VDokumen33 halamanPresente en PG 26 C Funciona Igual Con Solo 5VmmarfullBelum ada peringkat
- Pass KV-123Dokumen31 halamanPass KV-123vidamorjuniorBelum ada peringkat
- 04 Introduction To The Cisco IOS PDFDokumen67 halaman04 Introduction To The Cisco IOS PDFamitsinghBelum ada peringkat
- Rn5Rf Series: OutlineDokumen14 halamanRn5Rf Series: OutlineVlady Lopez CastroBelum ada peringkat
- cw29z408pq Chassis S63a PDFDokumen151 halamancw29z408pq Chassis S63a PDFDarcio Dar100% (1)
- Vi Characteristics of PN Junction DiodeDokumen17 halamanVi Characteristics of PN Junction DiodePranay PathadeBelum ada peringkat
- Smiths Connectors Medical BrochureDokumen12 halamanSmiths Connectors Medical BrochureSmiths ConnectorsBelum ada peringkat
- Calculation of System Noise Temperature and Noise PowerDokumen13 halamanCalculation of System Noise Temperature and Noise PowerSaptarshi GhoshBelum ada peringkat
- SC792Dokumen2 halamanSC792michaelguzziBelum ada peringkat
- Transmission LinesDokumen19 halamanTransmission LinesSherwin CatolosBelum ada peringkat
- SJ-20150203110107-040-ZXSDR R8862A (V1.0) Product Description - 808178Dokumen37 halamanSJ-20150203110107-040-ZXSDR R8862A (V1.0) Product Description - 808178MuhammadTouseefBelum ada peringkat
- Presentation List Int 2023Dokumen16 halamanPresentation List Int 2023125Jonwin Fidelis FamBelum ada peringkat
- SOLUTIONS FOR REVIEW QUESTIONS: SPECIAL FOR ICT 1111 at MZUMBE UNIVERSITYDokumen20 halamanSOLUTIONS FOR REVIEW QUESTIONS: SPECIAL FOR ICT 1111 at MZUMBE UNIVERSITYKubalyenda SilajiBelum ada peringkat
- Lab 3 Flexi Force SensorDokumen3 halamanLab 3 Flexi Force SensorazizBelum ada peringkat
- Design and Implementation of CMOS Full Adder Circuit With ECRL and Sleepy Keeper TechniqueDokumen6 halamanDesign and Implementation of CMOS Full Adder Circuit With ECRL and Sleepy Keeper TechniqueBibartan DasBelum ada peringkat
- Optical Fiber Technology: SciencedirectDokumen7 halamanOptical Fiber Technology: SciencedirectsamiaBelum ada peringkat