Anda mungkin juga menyukai
- Como Verificar Componentes Eletrônicos Básicos Usando Um MultimetroDokumen9 halamanComo Verificar Componentes Eletrônicos Básicos Usando Um MultimetroNilton MendesBelum ada peringkat
- Et001 PDFDokumen66 halamanEt001 PDFJose Alberto100% (1)
- Sensores Automotivos 1Dokumen24 halamanSensores Automotivos 1THE MOTORSBelum ada peringkat
- Divirta-Se Com A Eletrônica Vol 05Dokumen34 halamanDivirta-Se Com A Eletrônica Vol 05jimmytrold100% (2)
- Aprendendo e Praticando Eletronica 19Dokumen52 halamanAprendendo e Praticando Eletronica 19felisbinox67% (3)
- Medidor de indutância simples e barato para projetos eletrônicosDokumen4 halamanMedidor de indutância simples e barato para projetos eletrônicoseduolfer100% (1)
- EncoderDokumen17 halamanEncoderRoberto VerhagenBelum ada peringkat
- Projetos Em Clp Ladder Baseado No Twidosuite Parte ViiiDari EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte ViiiBelum ada peringkat
- Montagem Robô Seguidor de Linhas com Sensor CNY71 e Circuito ComparadorDokumen13 halamanMontagem Robô Seguidor de Linhas com Sensor CNY71 e Circuito ComparadorRamede Justo Dos SantosBelum ada peringkat
- PNP Ou NPNDokumen4 halamanPNP Ou NPNSocialBits TecnologiaBelum ada peringkat
- NPN Ou PNPDokumen9 halamanNPN Ou PNPFrancisco MárcioBelum ada peringkat
- Monitor de Batimentos Cardíacos - Parte 1Dokumen5 halamanMonitor de Batimentos Cardíacos - Parte 1careca1984Belum ada peringkat
- Guiado do Yokozuna: Sensores e Controle de MotoresDokumen12 halamanGuiado do Yokozuna: Sensores e Controle de MotoreskikeplaysBelum ada peringkat
- Teste TransistorDokumen6 halamanTeste TransistorDarilho Batista IgnacioBelum ada peringkat
- Sonda Detector RFDokumen7 halamanSonda Detector RFJosuel MarquesBelum ada peringkat
- Circuito Montagem Jogo Corrida EletrônicaDokumen12 halamanCircuito Montagem Jogo Corrida EletrônicaIvoBelum ada peringkat
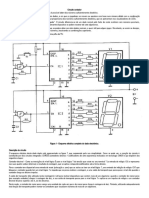
- Circuito contador aleatório de dois númerosDokumen5 halamanCircuito contador aleatório de dois númerosRonaldo RochaBelum ada peringkat
- Transistor DigitalDokumen19 halamanTransistor DigitaltecjadirBelum ada peringkat
- Sensores de proximidade: tipos, aplicações e configuraçõesDokumen20 halamanSensores de proximidade: tipos, aplicações e configuraçõesHumberto Medeiros CordeiroBelum ada peringkat
- Como funciona o PLLDokumen8 halamanComo funciona o PLLFrancisco SantosBelum ada peringkat
- Manual CatracaDokumen20 halamanManual CatracaJonathan DOS SANTOS CALDEIRABelum ada peringkat
- Traçador de curvasDokumen7 halamanTraçador de curvasPatrik1968Belum ada peringkat
- 1 - Curso de Manutencao. PS IiDokumen18 halaman1 - Curso de Manutencao. PS IiAnderson Bach100% (2)
- KMV 333Dokumen3 halamanKMV 333Marcilio Santos da SilvaBelum ada peringkat
- O Programa MMANA de Makoto Mori JE3HHT - Parte 1Dokumen7 halamanO Programa MMANA de Makoto Mori JE3HHT - Parte 1Tomi Pasin100% (1)
- Projetos Em Clp Ladder Baseado Na Placa Arduino Uno Parte XiiiDari EverandProjetos Em Clp Ladder Baseado Na Placa Arduino Uno Parte XiiiBelum ada peringkat
- Medidor de Baixa ResistenciaDokumen5 halamanMedidor de Baixa ResistenciaLuciano PereiraBelum ada peringkat
- Osciloscópio e suas aplicaçõesDokumen9 halamanOsciloscópio e suas aplicaçõesCheilaSilvaBelum ada peringkat
- AV1 OsciloscópioDokumen9 halamanAV1 OsciloscópioCheilaSilvaBelum ada peringkat
- Documento 2Dokumen59 halamanDocumento 2Lucas Daniel Natalia HelenaBelum ada peringkat
- Teste TransistoresDokumen4 halamanTeste TransistoresLutiane Cunha0% (1)
- Traçador de Curvas para SemicondutoresDokumen10 halamanTraçador de Curvas para SemicondutoresPatrik1968Belum ada peringkat
- Eletrônica - Sensores Magneto-ResistivosDokumen5 halamanEletrônica - Sensores Magneto-ResistivosFilipe Marques MacedoBelum ada peringkat
- Geradores Pulso EncodersDokumen35 halamanGeradores Pulso EncodersMateusMendonca100% (1)
- Circuito de ApagamentoDokumen4 halamanCircuito de Apagamentoapi-3800166Belum ada peringkat
- Configuração e testes do simulador portátil de ECG Handy SimDokumen19 halamanConfiguração e testes do simulador portátil de ECG Handy SimClub2011Belum ada peringkat
- Como Usar Displays de Leds Multiplexados PDFDokumen71 halamanComo Usar Displays de Leds Multiplexados PDFrenanzsBelum ada peringkat
- Manual Catraca ATZ200Dokumen24 halamanManual Catraca ATZ200RouberioRolim100% (1)
- Tradução ConstrucaoDokumen11 halamanTradução Construcaocarlos50% (2)
- Detector de MetalDokumen9 halamanDetector de MetalWELIGTON GOMESBelum ada peringkat
- Monte seu PLL sem mistériosDokumen8 halamanMonte seu PLL sem mistériosGuilhermeBelum ada peringkat
- AIWA Parte 6Dokumen3 halamanAIWA Parte 6SilviaBelum ada peringkat
- ADXL335 Accelerometer Interfacing With Arduino-2Dokumen14 halamanADXL335 Accelerometer Interfacing With Arduino-2sthefaniafBelum ada peringkat
- Manual Do Usuário Simulador de ECG SX-20Dokumen19 halamanManual Do Usuário Simulador de ECG SX-20Club2011Belum ada peringkat
- Construindo Uma Ponta Lógica para Verificar Circuitos DigitaisDokumen6 halamanConstruindo Uma Ponta Lógica para Verificar Circuitos DigitaisPaulo MartinsBelum ada peringkat
- Osciloscópio em Uma Caixa de Fósforos - Arduino - 14 Etapas (Com Imagens) - 2021Dokumen15 halamanOsciloscópio em Uma Caixa de Fósforos - Arduino - 14 Etapas (Com Imagens) - 2021nelsonBelum ada peringkat
- Motor Brushless DC-PauloDokumen5 halamanMotor Brushless DC-PauloSilso Paulo da SilvaBelum ada peringkat
- Projetos Em Clp Ladder Baseado No Twidosuite Parte IvDari EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte IvBelum ada peringkat
- Cnc3ax - CópiaDokumen11 halamanCnc3ax - CópiaAdalberto EvangelistaBelum ada peringkat
- 2.01 Instalação Detalhada 148 GTLDokumen14 halaman2.01 Instalação Detalhada 148 GTLSpecialarts ArcadeBelum ada peringkat
- A roda fônica: sensor digital que revolucionou a injeção eletrônicaDokumen9 halamanA roda fônica: sensor digital que revolucionou a injeção eletrônicaRuanWheeling50% (2)
- LED efeitos guiaDokumen20 halamanLED efeitos guiaRoldao AlmeidaBelum ada peringkat
- 18 - Informativo Sensor de Rotação - WebDokumen8 halaman18 - Informativo Sensor de Rotação - WebWilker costaBelum ada peringkat
- Wattimetro IK3OIL Rascunho FinalDokumen13 halamanWattimetro IK3OIL Rascunho FinalCospefogoBelum ada peringkat
- Circuito HorizontalDokumen5 halamanCircuito Horizontalapi-3800166100% (1)
- Ajustement BRDokumen2 halamanAjustement BRminattoBelum ada peringkat
- O Projeto MecânicoDokumen24 halamanO Projeto MecânicoFilipe BastosBelum ada peringkat
- lm335 t0Dokumen17 halamanlm335 t0minattoBelum ada peringkat
- CT-SA Ata 24 Ord 24-10-07 01Dokumen2 halamanCT-SA Ata 24 Ord 24-10-07 01minattoBelum ada peringkat
- Dispositivo DRDokumen2 halamanDispositivo DRMaltzael SilvaBelum ada peringkat
- RoHS PTDokumen5 halamanRoHS PTminattoBelum ada peringkat