Anda mungkin juga menyukai
- Numerical For Practice MidtermDokumen3 halamanNumerical For Practice MidtermSiddhant SinhaBelum ada peringkat
- Gate 2006 PDFDokumen21 halamanGate 2006 PDFVammsy Manikanta SaiBelum ada peringkat
- CH Process-CalculationsDokumen11 halamanCH Process-CalculationsHrutik NimbalkarBelum ada peringkat
- Gate 2001 PDFDokumen14 halamanGate 2001 PDFVammsy Manikanta SaiBelum ada peringkat
- Momentum TransferDokumen5 halamanMomentum TransferHens Christian FuentesBelum ada peringkat
- CRE GATE Question Paper PDFDokumen28 halamanCRE GATE Question Paper PDFChandra prakash GuptaBelum ada peringkat
- Tutorial 1 - SolutionDokumen9 halamanTutorial 1 - SolutionerewrewrBelum ada peringkat
- ME 346 Lab Final ExamDokumen9 halamanME 346 Lab Final ExamSaad RasheedBelum ada peringkat
- Ferementer DesignDokumen38 halamanFerementer DesignMilton Dela Rosa JrBelum ada peringkat
- Surveying - 2 July 2013Dokumen0 halamanSurveying - 2 July 2013Prasad C MBelum ada peringkat
- PM8082 - Model Exam Question Papers.Dokumen4 halamanPM8082 - Model Exam Question Papers.PCT HABEEBURRAHMANBelum ada peringkat
- Gate 1994 PDFDokumen16 halamanGate 1994 PDFVammsy Manikanta SaiBelum ada peringkat
- Isothermal Reactor Design: 1. Batch OperationDokumen3 halamanIsothermal Reactor Design: 1. Batch Operationنزار الدهاميBelum ada peringkat
- Rr320802chemicalreactionengineeringiDokumen8 halamanRr320802chemicalreactionengineeringiSanthosh KumarBelum ada peringkat
- Chapter 5 AdsorptionDokumen46 halamanChapter 5 AdsorptionSyahmiBelum ada peringkat
- Exam Weekly Exam5Dokumen4 halamanExam Weekly Exam5Gab LibetarioBelum ada peringkat
- Set 4Dokumen3 halamanSet 4Ibtisam FarhaniBelum ada peringkat
- Ex0 Questions SolutionsDokumen7 halamanEx0 Questions SolutionsBiniyam haileBelum ada peringkat
- Semester-6 3360503 CRE MCQ KRD PDFDokumen9 halamanSemester-6 3360503 CRE MCQ KRD PDFDhruv RanaBelum ada peringkat
- Fluid Mechanics Question BankDokumen6 halamanFluid Mechanics Question BankDinesh KumarBelum ada peringkat
- Lect 2 Response of First Order SystemsDokumen19 halamanLect 2 Response of First Order SystemsZaidoon MohsinBelum ada peringkat
- Energy Balance On Reactive ProcessesDokumen21 halamanEnergy Balance On Reactive ProcessesSantosErnestoMamaniApazaBelum ada peringkat
- 1 Units and Dimensions 54Dokumen24 halaman1 Units and Dimensions 54SSBelum ada peringkat
- Soln Sa Adsorption PDFDokumen2 halamanSoln Sa Adsorption PDFRee ValeraBelum ada peringkat
- CME 3303 HW 6 Solution PDFDokumen4 halamanCME 3303 HW 6 Solution PDFrum kaunBelum ada peringkat
- Mass Transfer Operations II Rr320801Dokumen8 halamanMass Transfer Operations II Rr320801Nagwa MansyBelum ada peringkat
- Day 2 Part 2 PDFDokumen3 halamanDay 2 Part 2 PDF5ChEA DriveBelum ada peringkat
- Momentum Transfer PDFDokumen5 halamanMomentum Transfer PDFonyxBelum ada peringkat
- FLR8 - Unsteady Flow HeadDokumen9 halamanFLR8 - Unsteady Flow HeadElijah SorianoBelum ada peringkat
- Chapter 6 SolutionsDokumen11 halamanChapter 6 Solutionskdd1218wBelum ada peringkat
- Gas Absorption Problems and SolutionsDokumen11 halamanGas Absorption Problems and Solutionskokorojiminie connectBelum ada peringkat
- Assignment 1 Air PollutionDokumen21 halamanAssignment 1 Air PollutionAqilah Hanim100% (1)
- Unit Operations Tutorial 2015-2016Dokumen13 halamanUnit Operations Tutorial 2015-2016hazimraad0% (1)
- MCQ For Mass TransferDokumen95 halamanMCQ For Mass TransferSatyam MarvaniyaBelum ada peringkat
- Heat TransferDokumen3 halamanHeat TransferAlbert Junior EvangelistaBelum ada peringkat
- 3Dokumen10 halaman3JaeDukAndrewSeoBelum ada peringkat
- Problem DrillDokumen3 halamanProblem DrillEina Scarlet0% (2)
- 1 - Energy and Energy BalancesDokumen135 halaman1 - Energy and Energy BalancesHabib Al-Aziz100% (2)
- Internal Forced ConvectionDokumen18 halamanInternal Forced ConvectionMohd Jamal Mohd MoktarBelum ada peringkat
- Chapter 4 - Distributed-Parameters Models: Profa. Liliane Lona - em RevisãoDokumen39 halamanChapter 4 - Distributed-Parameters Models: Profa. Liliane Lona - em RevisãoMônica CarneiroBelum ada peringkat
- CH E 511A: Separation Processes and Introduction To Particulate Technology LeachingDokumen8 halamanCH E 511A: Separation Processes and Introduction To Particulate Technology LeachingKhayie Victoriano100% (1)
- CH138P WS 1.2 Geromo HALDokumen11 halamanCH138P WS 1.2 Geromo HALLora Bell100% (1)
- BAB 9 Rajiv DuttaDokumen86 halamanBAB 9 Rajiv DuttaYuhin meidina ocsaBelum ada peringkat
- Gate Questions Bank ME HMTDokumen4 halamanGate Questions Bank ME HMTTaanzBelum ada peringkat
- 2 Cell Kinetics and Fermenter Design Part 2 DiscussionDokumen4 halaman2 Cell Kinetics and Fermenter Design Part 2 DiscussionEzekielBelum ada peringkat
- CHFEN 3553 Chemical Reaction Engineering: April 28, 2003 1:00 PM - 3:00 PM Answer All QuestionsDokumen4 halamanCHFEN 3553 Chemical Reaction Engineering: April 28, 2003 1:00 PM - 3:00 PM Answer All QuestionsJiahui TanBelum ada peringkat
- Rr410802 Chemical Reaction Engineering IIDokumen8 halamanRr410802 Chemical Reaction Engineering IISrinivasa Rao G100% (3)
- Homework 2: U KQ Where:u Btu H FT Q FT H K ConstantDokumen6 halamanHomework 2: U KQ Where:u Btu H FT Q FT H K ConstantkatelynBelum ada peringkat
- AgitationDokumen3 halamanAgitationSC TagleBelum ada peringkat
- Gate 1993 PDFDokumen11 halamanGate 1993 PDFVammsy Manikanta SaiBelum ada peringkat
- Questions On Transport PhenomenaDokumen6 halamanQuestions On Transport PhenomenaRatanBelum ada peringkat
- Nadar Saraswathi College of Engineering and Technology, TheniDokumen55 halamanNadar Saraswathi College of Engineering and Technology, TheniPatel TBelum ada peringkat
- CompilationDokumen17 halamanCompilationAnonymous 1VhXp1Belum ada peringkat
- Chemical Engineering KineticsDokumen45 halamanChemical Engineering KineticsMelissa Marie DimaculanganBelum ada peringkat
- Ps2 in PDCDokumen3 halamanPs2 in PDClily august0% (1)
- A Step Change of Magnitude 4 Is Introduced Into A System Having The Transfer FunctionDokumen8 halamanA Step Change of Magnitude 4 Is Introduced Into A System Having The Transfer FunctionFarid SarrafBelum ada peringkat
- QB PDC-1 PDFDokumen21 halamanQB PDC-1 PDFBalu BalireddiBelum ada peringkat
- Worksheet 2Dokumen5 halamanWorksheet 2Theødřøš ÄbBelum ada peringkat
- Tutorial 5.1 (Questions)Dokumen4 halamanTutorial 5.1 (Questions)Sabrina AzharBelum ada peringkat
- 1 Fields and FirstOrderLinear PDEDokumen19 halaman1 Fields and FirstOrderLinear PDESourav SutradharBelum ada peringkat
- Passport Size Color Photo With White BackgroundDokumen2 halamanPassport Size Color Photo With White BackgroundSourav SutradharBelum ada peringkat
- Brick KashfiaDokumen6 halamanBrick KashfiaSourav SutradharBelum ada peringkat
- Course Title: Course Code: CEP-457: ProcessDokumen4 halamanCourse Title: Course Code: CEP-457: ProcessSourav SutradharBelum ada peringkat
- Shahjalal University of Science and Technology, SylhetDokumen3 halamanShahjalal University of Science and Technology, SylhetSourav SutradharBelum ada peringkat
- Sign in To Your FREE Google Account - Select From The Menu "File Make A Copy" To Make Your Own Diagram! Remove This Text and The Default DrawingDokumen1 halamanSign in To Your FREE Google Account - Select From The Menu "File Make A Copy" To Make Your Own Diagram! Remove This Text and The Default DrawingSourav SutradharBelum ada peringkat
- Poster-Nanogel Short From Sourav+mimDokumen10 halamanPoster-Nanogel Short From Sourav+mimSourav SutradharBelum ada peringkat
- Silo - Tips - Optimising Glass Melting Processes With Energy Mass Balance CalculationsDokumen5 halamanSilo - Tips - Optimising Glass Melting Processes With Energy Mass Balance CalculationsSourav SutradharBelum ada peringkat
- Shahjalal University of Science and Technology, SylhetDokumen3 halamanShahjalal University of Science and Technology, SylhetSourav SutradharBelum ada peringkat
- Shahjalal University of Science and Technology, Sylhet Dept. of Chemical Engineering and Polymer Science Assignment No: 01Dokumen7 halamanShahjalal University of Science and Technology, Sylhet Dept. of Chemical Engineering and Polymer Science Assignment No: 01Sourav SutradharBelum ada peringkat
- 10 Viscoelasticity 01 Intro PDFDokumen4 halaman10 Viscoelasticity 01 Intro PDFSourav SutradharBelum ada peringkat
- CUFLDokumen9 halamanCUFLSourav SutradharBelum ada peringkat
- Assignment: Submit Hard Copy To My PigeonholeDokumen1 halamanAssignment: Submit Hard Copy To My PigeonholeSourav SutradharBelum ada peringkat
- Glass Industry: Presented ToDokumen46 halamanGlass Industry: Presented ToSourav SutradharBelum ada peringkat
- KPM ReportDokumen3 halamanKPM ReportSourav SutradharBelum ada peringkat
- Textile Chemical Safety and Security OverviewDokumen1 halamanTextile Chemical Safety and Security OverviewSourav SutradharBelum ada peringkat
- Cufl-Pfd 2Dokumen1 halamanCufl-Pfd 2Sourav SutradharBelum ada peringkat
- AutoCAD Commands Cheat Sheet by CivilCircleDokumen6 halamanAutoCAD Commands Cheat Sheet by CivilCircleSourav SutradharBelum ada peringkat
- Exp No. 11 Chem Process Lab ReportDokumen5 halamanExp No. 11 Chem Process Lab ReportSourav SutradharBelum ada peringkat
- Earth Electrode Resistance PDFDokumen28 halamanEarth Electrode Resistance PDFChathura PriyankaBelum ada peringkat
- MercerizationDokumen2 halamanMercerizationLohit MohapatraBelum ada peringkat
- BICYCLE DESIGN AND FRAME BUILDING Student Handout Jan 2020 PDFDokumen9 halamanBICYCLE DESIGN AND FRAME BUILDING Student Handout Jan 2020 PDFRikkinBelum ada peringkat
- Mark Scheme (Results) January 2007: GCE Mathematics Core Mathematics C3 (6665)Dokumen7 halamanMark Scheme (Results) January 2007: GCE Mathematics Core Mathematics C3 (6665)Fahema ShafiBelum ada peringkat
- Digital To Analog Converter (DAC)Dokumen32 halamanDigital To Analog Converter (DAC)Rajesh PaudyalBelum ada peringkat
- Introduction BearingDokumen4 halamanIntroduction BearingtonojsgpBelum ada peringkat
- Contoh SoalanDokumen5 halamanContoh SoalanPa ManjaBelum ada peringkat
- Chapt 6Dokumen15 halamanChapt 6morphos777Belum ada peringkat
- Physics CHP T 19Dokumen39 halamanPhysics CHP T 19RmyBelum ada peringkat
- Funteachtic Learning Center Bulalacao Bldg. P. Zamora ST., Batangas CityDokumen2 halamanFunteachtic Learning Center Bulalacao Bldg. P. Zamora ST., Batangas CityLorna HerillaBelum ada peringkat
- FM Lab ManualDokumen70 halamanFM Lab ManualRishi PatilBelum ada peringkat
- Glassomelt - Indian CalumiteDokumen5 halamanGlassomelt - Indian CalumiteSourabh JainBelum ada peringkat
- 00030316-Correlaciones PVT Crudo PesadoDokumen16 halaman00030316-Correlaciones PVT Crudo PesadoJohn Edinson Rodriguez FajardoBelum ada peringkat
- Structural Report BMU 13 Revere Place Brooklyn.Dokumen10 halamanStructural Report BMU 13 Revere Place Brooklyn.Laura MajjulBelum ada peringkat
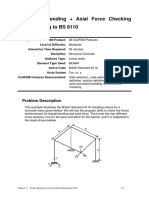
- Biaxial Bending + Axial Force Checking According To BS 8110Dokumen39 halamanBiaxial Bending + Axial Force Checking According To BS 8110HectoreRodriguezlBelum ada peringkat
- Kepes Gyorgy 1967 Light and DesignDokumen31 halamanKepes Gyorgy 1967 Light and DesignAnonymous TOMo4s100% (1)
- Sepharial - The Science of Foreknowledge Cd13 Id 1928069166 Size603Dokumen114 halamanSepharial - The Science of Foreknowledge Cd13 Id 1928069166 Size603makarandmone100% (9)
- Chapter 1Dokumen69 halamanChapter 1AlifNRBelum ada peringkat
- MA5630 Term Project ReportDokumen22 halamanMA5630 Term Project ReportvamshiBelum ada peringkat
- Cell Biology Cell Structures and Their FunctionsDokumen30 halamanCell Biology Cell Structures and Their FunctionsMing Shahir SalehBelum ada peringkat
- SEM 1 MCA 11 MathematicsDokumen379 halamanSEM 1 MCA 11 MathematicsMalatesh HavanagiBelum ada peringkat
- Production Engineering Reference Books For GATEDokumen3 halamanProduction Engineering Reference Books For GATEkavi_soniiBelum ada peringkat
- Heat SPM Mind MapDokumen6 halamanHeat SPM Mind MapAzaizulAhmadBelum ada peringkat
- 02-729-Pt5 Iss2Dokumen80 halaman02-729-Pt5 Iss2br1ggsyBelum ada peringkat
- PID Control Dynamics of A Robotic Arm Manipulator With Two Degrees of Freedom.Dokumen7 halamanPID Control Dynamics of A Robotic Arm Manipulator With Two Degrees of Freedom.David Isai Robles Gonzalez100% (1)
- (ACS Symposium Volume 923) Sönke Svenson (Eds.) - Polymeric Drug Delivery I. Particulate Drug Carriers (2006, American Chemical Society) PDFDokumen350 halaman(ACS Symposium Volume 923) Sönke Svenson (Eds.) - Polymeric Drug Delivery I. Particulate Drug Carriers (2006, American Chemical Society) PDFHeber AndradaBelum ada peringkat
- Three Dimensional Cutting Force Analysis in End MillingDokumen11 halamanThree Dimensional Cutting Force Analysis in End Millingamsubra8874Belum ada peringkat
- DLM ValidationDokumen7 halamanDLM ValidationSandilya KambampatiBelum ada peringkat
- Identification and Elimination of Hygro-Thermo - Mechanical Stress-Effects in A High-Precision MEMS Pressure Sensor - IEEE Xplore DocumentDokumen2 halamanIdentification and Elimination of Hygro-Thermo - Mechanical Stress-Effects in A High-Precision MEMS Pressure Sensor - IEEE Xplore DocumentEnrique OsorioBelum ada peringkat
- Medium Voltage - CELLPACKDokumen12 halamanMedium Voltage - CELLPACKfreddysh4330Belum ada peringkat