Anda mungkin juga menyukai
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (120)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Foundation Design Handbook - Hydrocarbon Processing - 1974Dokumen96 halamanFoundation Design Handbook - Hydrocarbon Processing - 1974VS2712100% (4)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Slope StabilityDokumen45 halamanSlope StabilityCherie Daniel0% (1)
- Homework SolutionDokumen25 halamanHomework SolutionHirman De NovaBelum ada peringkat
- Introduction To Time Wave Form AnalysisDokumen19 halamanIntroduction To Time Wave Form Analysissaidha4568483Belum ada peringkat
- Design of 765kv Transmission LineDokumen10 halamanDesign of 765kv Transmission LineNaveen SabbavarapuBelum ada peringkat
- 1988 Analysis and Design of Single Pole Transmission StructureDokumen12 halaman1988 Analysis and Design of Single Pole Transmission StructureChandara KOEMBelum ada peringkat
- Single Phase Liquid Flow - Water Hammer and Surge Pressure Design GuideDokumen11 halamanSingle Phase Liquid Flow - Water Hammer and Surge Pressure Design GuideCivil FriendBelum ada peringkat
- Tuned Mass Damper Report PDFDokumen21 halamanTuned Mass Damper Report PDFRitu t Raj100% (1)
- 09-Advanced Transport PhenomenaDokumen1 halaman09-Advanced Transport Phenomenasudhakar kBelum ada peringkat
- Physics For Computer Science Students With Emphasis On Atomic and Semiconductor Physics - A. Damask e S. SchwarzDokumen246 halamanPhysics For Computer Science Students With Emphasis On Atomic and Semiconductor Physics - A. Damask e S. SchwarzMichel AndradeBelum ada peringkat
- Gsa NotesDokumen4 halamanGsa NotesLeenaBelum ada peringkat
- Relay: Relay Is Basically A Magnetism Based Switch. It Consists of A Coil Through Which Current Passes and OnDokumen9 halamanRelay: Relay Is Basically A Magnetism Based Switch. It Consists of A Coil Through Which Current Passes and OnAnonymous v5QjDW2eHxBelum ada peringkat
- ANGEN - En005 Restricted Earth Fault Protection Using An I0 Input of A VAMP RelayDokumen3 halamanANGEN - En005 Restricted Earth Fault Protection Using An I0 Input of A VAMP RelaySubhasis ChandBelum ada peringkat
- Robert Caldwell - Dark Energy CosmologyDokumen21 halamanRobert Caldwell - Dark Energy CosmologyLopmazBelum ada peringkat
- Light Emitting Diode (LED) - Working, Construction and Symbol - DiodeDokumen19 halamanLight Emitting Diode (LED) - Working, Construction and Symbol - DiodehavejsnjBelum ada peringkat
- Assignment N1Dokumen9 halamanAssignment N1Rania ChBelum ada peringkat
- Tugas Perpindahan PanasDokumen20 halamanTugas Perpindahan PanasLiyan Fajar GintaraBelum ada peringkat
- OATBooster Formula Sheet (July 2022) PDokumen11 halamanOATBooster Formula Sheet (July 2022) PzainabBelum ada peringkat
- V. Bernoulli EquationDokumen31 halamanV. Bernoulli EquationNugraha RizkiBelum ada peringkat
- 17 Eh PH DiagramsDokumen16 halaman17 Eh PH Diagramsmuhammad yusufBelum ada peringkat
- 1.3 Mass and Weight - SET 01 (Marking Scheme)Dokumen6 halaman1.3 Mass and Weight - SET 01 (Marking Scheme)Navyana ArenjaBelum ada peringkat
- Internal Combustion Engines - H. B. Keswani - 2Dokumen169 halamanInternal Combustion Engines - H. B. Keswani - 2Salman ShaxShax HeissBelum ada peringkat
- Evaporation: Isohyetal MethodDokumen9 halamanEvaporation: Isohyetal MethodAnonymous aE0YYlCOKBelum ada peringkat
- UNITS AND MEASUREMENTS Assignment PDFDokumen3 halamanUNITS AND MEASUREMENTS Assignment PDFvanshika MorBelum ada peringkat
- Lame ConstantsDokumen2 halamanLame ConstantsAldi NurseptaBelum ada peringkat
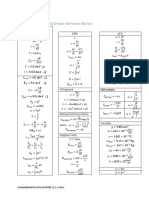
- FormulaSheet For EM and SHM v1.1.1Dokumen1 halamanFormulaSheet For EM and SHM v1.1.1陳輝王Belum ada peringkat
- 63996.indd - KVSApplDesign - CatalogDokumen56 halaman63996.indd - KVSApplDesign - CatalogTeu SoklengBelum ada peringkat
- 09 - Chapter 2 PDFDokumen34 halaman09 - Chapter 2 PDFrajkumarBelum ada peringkat
- Modeling and Altitude Control of Quad-Rotor UAVDokumen6 halamanModeling and Altitude Control of Quad-Rotor UAVescanusBelum ada peringkat