Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- "Job Evaluation"Dokumen68 halaman"Job Evaluation"Anusha Reddy100% (2)
- Manual de Usuario 4010ESDokumen1 halamanManual de Usuario 4010ESRobel MTBelum ada peringkat
- ExampleApp Functional SpecificationDokumen119 halamanExampleApp Functional SpecificationmilosvarakBelum ada peringkat
- HSE Communication ProcedureDokumen7 halamanHSE Communication ProcedureWanda QurniaBelum ada peringkat
- Colegio Tecnico Profesional Santo DomingoDokumen3 halamanColegio Tecnico Profesional Santo DomingoStaling BFloresBelum ada peringkat
- Lesson Plan Civic Form 3Dokumen1 halamanLesson Plan Civic Form 3Nurul Liyana Abdullah100% (2)
- MATLab Manual PDFDokumen40 halamanMATLab Manual PDFAkhil C.O.Belum ada peringkat
- Outlook Errors & SMTP ListDokumen19 halamanOutlook Errors & SMTP Listdixityog0% (1)
- Chapter 14 Multiple Choice QuestionsDokumen6 halamanChapter 14 Multiple Choice QuestionsDawlat SalamaBelum ada peringkat
- ISO 30401 MandateDokumen4 halamanISO 30401 MandateTheerapan CBelum ada peringkat
- 220-229 Muhammad Hilal SudarbiDokumen10 halaman220-229 Muhammad Hilal SudarbiMuh Hilal Sudarbi NewBelum ada peringkat
- Bharat 101 User ManualDokumen48 halamanBharat 101 User ManualRaghu NathBelum ada peringkat
- Alfredo Espin1Dokumen10 halamanAlfredo Espin1Ciber Genesis Rosario de MoraBelum ada peringkat
- Autism Awareness Carousel Project ProposalDokumen5 halamanAutism Awareness Carousel Project ProposalMargaret Franklin100% (1)
- Specific Volume, M /KG Internal Energy, KJ/KG Temp. Press. Sat. Liquid Evap. Sat. Vapor Sat. Liquid Evap. Sat. Vapor (C) (Kpa)Dokumen6 halamanSpecific Volume, M /KG Internal Energy, KJ/KG Temp. Press. Sat. Liquid Evap. Sat. Vapor Sat. Liquid Evap. Sat. Vapor (C) (Kpa)sidhartha dasBelum ada peringkat
- Combinatorial Geometry PDFDokumen2 halamanCombinatorial Geometry PDFLarryBelum ada peringkat
- 2815 Jan 08 QP6Dokumen12 halaman2815 Jan 08 QP6Philip_830Belum ada peringkat
- Back To Basics - The Fundamentals of 4-20 MA Current Loops - Precision DigitalDokumen5 halamanBack To Basics - The Fundamentals of 4-20 MA Current Loops - Precision DigitalJason FloydBelum ada peringkat
- Converting .Mp4 Movies With VLCDokumen5 halamanConverting .Mp4 Movies With VLCrazvan_nBelum ada peringkat
- Webmethods Flow Service Design and Practice PDFDokumen11 halamanWebmethods Flow Service Design and Practice PDFJagadeeshwar ReddyBelum ada peringkat
- Gestalt Peeling The Onion Csi Presentatin March 12 2011Dokumen6 halamanGestalt Peeling The Onion Csi Presentatin March 12 2011Adriana Bogdanovska ToskicBelum ada peringkat
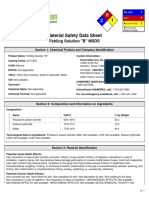
- Fehling Solution "B" MSDS: Section 1: Chemical Product and Company IdentificationDokumen6 halamanFehling Solution "B" MSDS: Section 1: Chemical Product and Company IdentificationAnnisaBelum ada peringkat
- VK1000 Quick Start Guide v52 - 3 7Dokumen11 halamanVK1000 Quick Start Guide v52 - 3 7Kirk WonBelum ada peringkat
- University of The CordillerasDokumen2 halamanUniversity of The Cordillerasmj Canilang100% (1)
- Judgement and PripositionsDokumen7 halamanJudgement and Pripositionschememartinez29Belum ada peringkat
- Kings' Montessori School: Guidelines in Administering / Taking Examinations Before ExaminationsDokumen4 halamanKings' Montessori School: Guidelines in Administering / Taking Examinations Before ExaminationsLar BataldoBelum ada peringkat
- Legal PhilosophyDokumen22 halamanLegal Philosophygentlejosh_316100% (2)
- Proceedings of The Society For Medieval Logic & Metaphysics 3Dokumen81 halamanProceedings of The Society For Medieval Logic & Metaphysics 3MeatredBelum ada peringkat
- P. Cartier, D. Foata (Auth.) - Problèmes Combinatoires de Commutation Et RéarrangementsDokumen81 halamanP. Cartier, D. Foata (Auth.) - Problèmes Combinatoires de Commutation Et RéarrangementsDJEHA14Belum ada peringkat
- Ich GuidelinesDokumen5 halamanIch GuidelinesdrdeeptisharmaBelum ada peringkat