Anda mungkin juga menyukai
- Knowledge is "Real Power": Introduction to Power QualityDari EverandKnowledge is "Real Power": Introduction to Power QualityBelum ada peringkat
- Last PDF of Project ReportDokumen18 halamanLast PDF of Project ReportRAVINA MANGAL100% (1)
- Life Cycle Testing of Electrical Loads by Down Counter: AbstractDokumen4 halamanLife Cycle Testing of Electrical Loads by Down Counter: AbstractTRIAD TECHNO SERVICESBelum ada peringkat
- Sphere GapDokumen10 halamanSphere GapAnonymous gbaQBP100% (1)
- EEE 805 Assignment Questions For Chapter 20Dokumen11 halamanEEE 805 Assignment Questions For Chapter 20ayeniBelum ada peringkat
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsDari EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsBelum ada peringkat
- HVDC Unit IIIDokumen22 halamanHVDC Unit IIISreenivas Reddy BodimallaBelum ada peringkat
- Auto Selection of Any Available PhaseDokumen16 halamanAuto Selection of Any Available PhaseRyan HarrisBelum ada peringkat
- Three Phase Fault Analysis Project with Auto ResetDokumen16 halamanThree Phase Fault Analysis Project with Auto ResetFirstLearnBelum ada peringkat
- Cascaded Multilevel Inverters With DCDokumen31 halamanCascaded Multilevel Inverters With DCAnand KumarBelum ada peringkat
- Rao Bahadur Y Mahabaleswarappa Engineering College, Ballari: Digital Phase SelectorDokumen14 halamanRao Bahadur Y Mahabaleswarappa Engineering College, Ballari: Digital Phase SelectorRaashi Kolgal0% (1)
- 2.1 History and Development of Facts DevicesDokumen22 halaman2.1 History and Development of Facts DevicesmianBelum ada peringkat
- SRCEM Three level H-bridge inverter reportDokumen7 halamanSRCEM Three level H-bridge inverter reportAnil ShahBelum ada peringkat
- Efficient SMPS Topologies ExplainedDokumen33 halamanEfficient SMPS Topologies ExplainedGeorge AntonyBelum ada peringkat
- Resonant TransformerDokumen15 halamanResonant TransformerfelogonzaBelum ada peringkat
- Over Voltage ProtectionDokumen15 halamanOver Voltage ProtectionSridharan MBelum ada peringkat
- Implementation of A Microcontroller Based 5 KVA Automatic Voltage StabilizerDokumen8 halamanImplementation of A Microcontroller Based 5 KVA Automatic Voltage StabilizerMawunyo100% (1)
- PSOC Question BankDokumen18 halamanPSOC Question Bankfvijayami100% (1)
- Construction and Working of Brushless DC PDFDokumen12 halamanConstruction and Working of Brushless DC PDFaswardi8756Belum ada peringkat
- Figure 2.71: First Order Low-Pass Butterworth FilterDokumen18 halamanFigure 2.71: First Order Low-Pass Butterworth Filternavkar_nisitBelum ada peringkat
- Matlab-Simulink Controller DesignDokumen4 halamanMatlab-Simulink Controller DesignMohamed SomaiBelum ada peringkat
- DC Motor CTRL Using Single SwitchDokumen44 halamanDC Motor CTRL Using Single SwitchAbhijeet NayakBelum ada peringkat
- Power Electronic Inverter - ReportDokumen9 halamanPower Electronic Inverter - ReportPrateek AgarwalBelum ada peringkat
- Power Quality Improvement in Distribution Network Using DSTATCOM With Battery Energy Storage SystemDokumen22 halamanPower Quality Improvement in Distribution Network Using DSTATCOM With Battery Energy Storage Systemvipin chandBelum ada peringkat
- Triangular Wave Generator Using Op Amp - EEEGUIDE PDFDokumen6 halamanTriangular Wave Generator Using Op Amp - EEEGUIDE PDFDeepanshi RuhelaBelum ada peringkat
- Pe Final Ex SS 2010-2011Dokumen8 halamanPe Final Ex SS 2010-2011Saif Uddin100% (1)
- Automatic Load SharingDokumen41 halamanAutomatic Load SharingSaravanan ViswakarmaBelum ada peringkat
- Project Presentation PDFDokumen22 halamanProject Presentation PDFARIF KANONBelum ada peringkat
- LVDT - Working Principle Construction Types, Advantages and ApplicationsDokumen11 halamanLVDT - Working Principle Construction Types, Advantages and ApplicationsKunal AhiwaleBelum ada peringkat
- Experiment No.5-Determination of XD and XQ of Synchronous Machine by Slip TestDokumen3 halamanExperiment No.5-Determination of XD and XQ of Synchronous Machine by Slip Test61EEPrabhat PalBelum ada peringkat
- 17ee82 - Ida - Mod 4 NotesDokumen18 halaman17ee82 - Ida - Mod 4 NotesManish Kumar SahaniBelum ada peringkat
- MATLAB Simulation of Controlled and Uncontrolled RectifiersDokumen32 halamanMATLAB Simulation of Controlled and Uncontrolled RectifiersAnime XBelum ada peringkat
- Multiple Transformers Oil Temperature Monitoring With Automatic CircuitDokumen25 halamanMultiple Transformers Oil Temperature Monitoring With Automatic CircuitPrem Narayan Singh100% (1)
- AC POWER WIRELESSLY BY HFDokumen3 halamanAC POWER WIRELESSLY BY HFa d100% (1)
- Simplified Analysis of Graetz CircuitDokumen42 halamanSimplified Analysis of Graetz CircuitKaran Singhania100% (3)
- Power Factor Thesis ReportDokumen70 halamanPower Factor Thesis ReportAsad AsifBelum ada peringkat
- GSM Based Fault Monitoring SystemDokumen23 halamanGSM Based Fault Monitoring SystemSanjana Singh100% (1)
- Arduino-based cable fault detection system locates issuesDokumen7 halamanArduino-based cable fault detection system locates issuesUmair Mansoor100% (1)
- Why We Need Power Supplies and Batteries for Telecom EquipmentDokumen18 halamanWhy We Need Power Supplies and Batteries for Telecom Equipmentsamad_omidvar629250% (2)
- Brake Load Test of Squirel Cage Induction Motor 3 PhaseDokumen7 halamanBrake Load Test of Squirel Cage Induction Motor 3 Phasejassisc100% (1)
- Shreyash Bhimanwar 111907050 Entc Experiment No. 1 Characterization of RTDDokumen49 halamanShreyash Bhimanwar 111907050 Entc Experiment No. 1 Characterization of RTDshreyash100% (1)
- Nba C6Dokumen23 halamanNba C6Satya NarayanaBelum ada peringkat
- LC5296 LC5296-H 5006RN LC5248E User Manual PDFDokumen36 halamanLC5296 LC5296-H 5006RN LC5248E User Manual PDFPankaj MauryaBelum ada peringkat
- Impedance RelayDokumen3 halamanImpedance Relayarjuna4306100% (1)
- Static RelaysDokumen11 halamanStatic RelaysBharathwaj SreedharBelum ada peringkat
- Final Report (Akash)Dokumen36 halamanFinal Report (Akash)Akash TaradaleBelum ada peringkat
- Voltage Stability With The Help of STATCOMDokumen6 halamanVoltage Stability With The Help of STATCOMijsretBelum ada peringkat
- Digital Energy MeterDokumen1 halamanDigital Energy MetersskendreBelum ada peringkat
- Arduino Solar Tracker Using LDR and Servo MotorDokumen9 halamanArduino Solar Tracker Using LDR and Servo MotorAvnish SharmaBelum ada peringkat
- DC Link CurrentDokumen8 halamanDC Link CurrentsubbannaBelum ada peringkat
- PLC & 8051Dokumen22 halamanPLC & 8051Sunil Patel100% (1)
- Power Systems Protection Course: Al-Balqa Applied UniversityDokumen36 halamanPower Systems Protection Course: Al-Balqa Applied UniversityAayush PatidarBelum ada peringkat
- Ac DrivesDokumen36 halamanAc Drivesaswardi50% (2)
- Protection and Monitoring of Three Phase Induction Motor From Over Voltage, Under Voltage, Single Phasing, Phase Reversal, and Overheating ReviewDokumen4 halamanProtection and Monitoring of Three Phase Induction Motor From Over Voltage, Under Voltage, Single Phasing, Phase Reversal, and Overheating ReviewAnonymous CUPykm6DZBelum ada peringkat
- Unit 4 Power Quality Management in Smart Grid Emc - Electromagnetic CompatibilityDokumen18 halamanUnit 4 Power Quality Management in Smart Grid Emc - Electromagnetic CompatibilityMathumathi TBelum ada peringkat
- Lecture 4 Diode Circuits NewDokumen76 halamanLecture 4 Diode Circuits Newصدام حسینBelum ada peringkat
- Automatic Control of Street LightDokumen63 halamanAutomatic Control of Street LightMani RaoBelum ada peringkat
- Removal of CR (VI) From Waste Water Using Hyacinth Roots Kinetic, Equilibrium and Thermodynamic StudiesDokumen9 halamanRemoval of CR (VI) From Waste Water Using Hyacinth Roots Kinetic, Equilibrium and Thermodynamic StudiesS Bharadwaj ReddyBelum ada peringkat
- Kinetics of Condensation Reaction of Crude Glycerol With Acetaldehyde in A Reactive Extraction ProcessDokumen10 halamanKinetics of Condensation Reaction of Crude Glycerol With Acetaldehyde in A Reactive Extraction ProcessS Bharadwaj ReddyBelum ada peringkat
- Equilibrium, Kinetic and Thermodynamic Studies On Ion of Copper and Zinc From Mixed Solution by Erythrina Variegata Oriental Is Leaf PowderDokumen24 halamanEquilibrium, Kinetic and Thermodynamic Studies On Ion of Copper and Zinc From Mixed Solution by Erythrina Variegata Oriental Is Leaf PowderS Bharadwaj ReddyBelum ada peringkat
- Waste-Water Reuse by Improved Application of Existing TechnoDokumen11 halamanWaste-Water Reuse by Improved Application of Existing TechnoS Bharadwaj ReddyBelum ada peringkat
- Friedel-Crafts Alkylation of Xylenes With Tert-Butanol Over Me So Porous Superacid UDCaT-5Dokumen22 halamanFriedel-Crafts Alkylation of Xylenes With Tert-Butanol Over Me So Porous Superacid UDCaT-5S Bharadwaj ReddyBelum ada peringkat
- Removal of Tetra Hydro Fur An Using Isolated Strain From Municipal Seweage EffulentDokumen11 halamanRemoval of Tetra Hydro Fur An Using Isolated Strain From Municipal Seweage EffulentS Bharadwaj ReddyBelum ada peringkat
- Study of Economic Viability of Using Ammonium Hydroxide As Part Replacement of Sodium Hydroxide in Regeneration Media in Water Treatment PlantDokumen12 halamanStudy of Economic Viability of Using Ammonium Hydroxide As Part Replacement of Sodium Hydroxide in Regeneration Media in Water Treatment PlantS Bharadwaj ReddyBelum ada peringkat
- Treatment of Textile Waste Water Containing Black Sulfur Dye Using Ceramic Membrane Based Separation ProcessDokumen5 halamanTreatment of Textile Waste Water Containing Black Sulfur Dye Using Ceramic Membrane Based Separation ProcessS Bharadwaj ReddyBelum ada peringkat
- The Manufacture of Ethanol From Casein Whey A Two-Fold Solution To The Dilemmas of Waste Disposal and Energy CrunchDokumen19 halamanThe Manufacture of Ethanol From Casein Whey A Two-Fold Solution To The Dilemmas of Waste Disposal and Energy CrunchS Bharadwaj ReddyBelum ada peringkat
- Potential Use of Eichhornia Crassipes For Treatment of Highly Toxic Sulphur Black EffluentDokumen7 halamanPotential Use of Eichhornia Crassipes For Treatment of Highly Toxic Sulphur Black EffluentS Bharadwaj ReddyBelum ada peringkat
- Studies in Adsorptiondesorption of Carbon DioxideDokumen6 halamanStudies in Adsorptiondesorption of Carbon DioxideS Bharadwaj ReddyBelum ada peringkat
- Experimental Studies On Remediation of Arsenic Contaminated Soils Using A Novel Solvent Extract Ant MixtureDokumen6 halamanExperimental Studies On Remediation of Arsenic Contaminated Soils Using A Novel Solvent Extract Ant MixtureS Bharadwaj ReddyBelum ada peringkat
- Study For Recovery of Uranium From Waste Effluent by Nitrogen Based SorbentDokumen7 halamanStudy For Recovery of Uranium From Waste Effluent by Nitrogen Based SorbentS Bharadwaj ReddyBelum ada peringkat
- Selectivity Engineering in On of Mesitylene With Isopropyl Alcohol Over Cesium Substituted Hetero Pol Ya Cid Supported On K-10 ClayDokumen18 halamanSelectivity Engineering in On of Mesitylene With Isopropyl Alcohol Over Cesium Substituted Hetero Pol Ya Cid Supported On K-10 ClayS Bharadwaj ReddyBelum ada peringkat
- Pollution Sources From Petrochemial PlantsDokumen6 halamanPollution Sources From Petrochemial PlantsS Bharadwaj ReddyBelum ada peringkat
- Photo Catalytic Degradation of Organic Pollutants in Dairy EffluentDokumen8 halamanPhoto Catalytic Degradation of Organic Pollutants in Dairy EffluentS Bharadwaj ReddyBelum ada peringkat
- Ion of Basic Dye Using Industrial Waste Spent Brewery YeastDokumen26 halamanIon of Basic Dye Using Industrial Waste Spent Brewery YeastS Bharadwaj ReddyBelum ada peringkat
- Modeling and Simulation For S.S. Re-Rolling Mills Waste TreatmentDokumen11 halamanModeling and Simulation For S.S. Re-Rolling Mills Waste TreatmentS Bharadwaj ReddyBelum ada peringkat
- Assessment of Water Quality of Tolly's Nullah Using CCME Water Quality Index MethodDokumen7 halamanAssessment of Water Quality of Tolly's Nullah Using CCME Water Quality Index MethodS Bharadwaj ReddyBelum ada peringkat
- Atom Economical Synthesis of 4'-Methylpropiophenone by Friedel-Crafts Acylation of Toluene With Propionic Anhydride Over Solid Me So Porous Superacid UDCaT-5Dokumen17 halamanAtom Economical Synthesis of 4'-Methylpropiophenone by Friedel-Crafts Acylation of Toluene With Propionic Anhydride Over Solid Me So Porous Superacid UDCaT-5S Bharadwaj ReddyBelum ada peringkat
- Equilibrium Studies For Ion of Zinc Onto Gallus Domestic Us Shell PowderDokumen7 halamanEquilibrium Studies For Ion of Zinc Onto Gallus Domestic Us Shell PowderS Bharadwaj ReddyBelum ada peringkat
- Evaluation of A Novel Sorbent For Recovery of Radio-Nuclides - A Comparison of Batch and Column OperationDokumen6 halamanEvaluation of A Novel Sorbent For Recovery of Radio-Nuclides - A Comparison of Batch and Column OperationS Bharadwaj ReddyBelum ada peringkat
- Defluoridation of Water Using Phosphoric Acid Modified Activated Carbon Obtained From Sugarcane-ThrashDokumen7 halamanDefluoridation of Water Using Phosphoric Acid Modified Activated Carbon Obtained From Sugarcane-ThrashS Bharadwaj ReddyBelum ada peringkat
- Adsorption of CD (II) and PB (II) From Aqueous Solutions On Saw Dust and Neem BarkDokumen11 halamanAdsorption of CD (II) and PB (II) From Aqueous Solutions On Saw Dust and Neem BarkS Bharadwaj ReddyBelum ada peringkat
- A Novel Approach For Toxicity Removal Through Tailor-Made SorbentDokumen6 halamanA Novel Approach For Toxicity Removal Through Tailor-Made SorbentS Bharadwaj ReddyBelum ada peringkat
- Activated Carbon From Corn Cobs and Coconut Shell For Heavy Metal Ions AdsorptionDokumen8 halamanActivated Carbon From Corn Cobs and Coconut Shell For Heavy Metal Ions AdsorptionS Bharadwaj Reddy100% (1)
- Sensitivity Analysis of A 500 W Proton Exchange Membrane Fuel Cell Stack by Design of ExperimentsDokumen9 halamanSensitivity Analysis of A 500 W Proton Exchange Membrane Fuel Cell Stack by Design of ExperimentsS Bharadwaj ReddyBelum ada peringkat
- Experimental Studies On Saline Waste Water Treatment Using Electrochemical Catalytic ReactorsDokumen9 halamanExperimental Studies On Saline Waste Water Treatment Using Electrochemical Catalytic ReactorsS Bharadwaj ReddyBelum ada peringkat
- Preparation of Tri-Metallic Catalyst For Direct Ethanol Fuel CellDokumen4 halamanPreparation of Tri-Metallic Catalyst For Direct Ethanol Fuel CellS Bharadwaj ReddyBelum ada peringkat
- Electrochemical Importance of Anode and Cathode Coating in A Membrane Cell Chlor Alkali IndustryDokumen8 halamanElectrochemical Importance of Anode and Cathode Coating in A Membrane Cell Chlor Alkali IndustryS Bharadwaj Reddy100% (1)
- Volkswagen Tiguan DeutschlandDokumen437 halamanVolkswagen Tiguan Deutschlandtekkiegti100% (1)
- TyreSense Hardware-Install-GuideDokumen52 halamanTyreSense Hardware-Install-GuideCristian Villegas RuizBelum ada peringkat
- 1 Power Electronics - IntroductionDokumen10 halaman1 Power Electronics - Introductionggomathi2004Belum ada peringkat
- TM1115 - STM32F103ZE - Chapter 6 (I2C - LCD)Dokumen23 halamanTM1115 - STM32F103ZE - Chapter 6 (I2C - LCD)Safwat KhairBelum ada peringkat
- HCD-GRX9000/RX900: Service ManualDokumen86 halamanHCD-GRX9000/RX900: Service ManualVitorio LogoBelum ada peringkat
- Toyota Rav4 (2001-2005), Celica Head Units Pinout and Wiring @Dokumen2 halamanToyota Rav4 (2001-2005), Celica Head Units Pinout and Wiring @Guy GlasBelum ada peringkat
- MZ TuningDokumen24 halamanMZ TuningJawaCz100% (2)
- HMGS Medium Voltage Gas-Insulated Switchgear Cubicle Type, Internal Arc-ResistantDokumen24 halamanHMGS Medium Voltage Gas-Insulated Switchgear Cubicle Type, Internal Arc-ResistantLOI HOBelum ada peringkat
- 2 WaydistributorDokumen53 halaman2 WaydistributormbhaditBelum ada peringkat
- ID226 User Manual R1.04 PH5 20180402 PDFDokumen53 halamanID226 User Manual R1.04 PH5 20180402 PDFdaex nixon100% (1)
- Vehicle (Car) Checklist: Mechanical Check Engine Engine BayDokumen3 halamanVehicle (Car) Checklist: Mechanical Check Engine Engine Bayjandy salazarBelum ada peringkat
- Wecon VD2 SA Series Servo Drives Manual (Full V1.2) VfinalDokumen226 halamanWecon VD2 SA Series Servo Drives Manual (Full V1.2) VfinalJose Gregorio Lira SerranoBelum ada peringkat
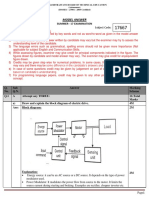
- 2017 Summer Model Answer PaperDokumen22 halaman2017 Summer Model Answer PaperAbhishek ChavanBelum ada peringkat
- OT180UNV800C2DIMLT2P6Dokumen11 halamanOT180UNV800C2DIMLT2P6Ezequiel FregaBelum ada peringkat
- Wire Gauge and Current Limits PDFDokumen3 halamanWire Gauge and Current Limits PDFShahbazBelum ada peringkat
- Ford Mustang 1988-2006Dokumen16 halamanFord Mustang 1988-2006meng798651100% (1)
- Questions & Answers On Electromechanical Energy ConversionsDokumen14 halamanQuestions & Answers On Electromechanical Energy Conversionskibrom atsbhaBelum ada peringkat
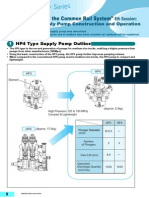
- HP4 high-pressure compact pump overviewDokumen4 halamanHP4 high-pressure compact pump overviewpepeladazoBelum ada peringkat
- Tensor-GO Battery Column Array v1.2Dokumen2 halamanTensor-GO Battery Column Array v1.2RaulBelum ada peringkat
- Nlight Hardware ManualDokumen42 halamanNlight Hardware Manualtberg32Belum ada peringkat
- ATyS CatalogueDokumen31 halamanATyS CatalogueDenekew GetahunBelum ada peringkat
- Motores Auxiliares Marinos Cat Mma c18 Lehm8147 00Dokumen4 halamanMotores Auxiliares Marinos Cat Mma c18 Lehm8147 00Manuel Armando Salazar BravoBelum ada peringkat
- List Tool Mekanik MRCDokumen2 halamanList Tool Mekanik MRCDeny IrawanBelum ada peringkat
- Light Commercial (Eu) : Ningbo Electric Co.,LtdDokumen32 halamanLight Commercial (Eu) : Ningbo Electric Co.,LtdAlexandru ABelum ada peringkat
- Make A Rocking Muskoka Chair Out of Composite Wood 2 PDFDokumen8 halamanMake A Rocking Muskoka Chair Out of Composite Wood 2 PDFCocis CosminBelum ada peringkat
- Home Circuits Other: SchematicDokumen6 halamanHome Circuits Other: SchematicGrafo Bogdanov Novi SadBelum ada peringkat
- SB1200 Tomahawk Hard LandingDokumen8 halamanSB1200 Tomahawk Hard LandingfelipeBelum ada peringkat
- RLC 1st ManualDokumen141 halamanRLC 1st Manualjaved shaikh chaandBelum ada peringkat
- Echometer Acoustic Wellhead Parts List: Part Number Part Name PictureDokumen4 halamanEchometer Acoustic Wellhead Parts List: Part Number Part Name PictureBoyke SaptaBelum ada peringkat
- Cameron Conventional WellheadDokumen25 halamanCameron Conventional WellheadQaiser Hafeez100% (4)
- Build Your Own Electric Vehicle, Third EditionDari EverandBuild Your Own Electric Vehicle, Third EditionPenilaian: 4.5 dari 5 bintang4.5/5 (3)
- The Rare Metals War: the dark side of clean energy and digital technologiesDari EverandThe Rare Metals War: the dark side of clean energy and digital technologiesPenilaian: 5 dari 5 bintang5/5 (2)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionDari EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionPenilaian: 4.5 dari 5 bintang4.5/5 (542)
- Industrial Piping and Equipment Estimating ManualDari EverandIndustrial Piping and Equipment Estimating ManualPenilaian: 5 dari 5 bintang5/5 (7)
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsDari EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsPenilaian: 4 dari 5 bintang4/5 (1)
- Asset Integrity Management for Offshore and Onshore StructuresDari EverandAsset Integrity Management for Offshore and Onshore StructuresBelum ada peringkat
- Digital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsDari EverandDigital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsPenilaian: 5 dari 5 bintang5/5 (3)
- Understanding Automotive Electronics: An Engineering PerspectiveDari EverandUnderstanding Automotive Electronics: An Engineering PerspectivePenilaian: 3.5 dari 5 bintang3.5/5 (16)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Dari EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Penilaian: 5 dari 5 bintang5/5 (1)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeDari EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgePenilaian: 5 dari 5 bintang5/5 (8)
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemDari EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemBelum ada peringkat
- The Graphene Revolution: The Weird Science of the Ultra-thinDari EverandThe Graphene Revolution: The Weird Science of the Ultra-thinPenilaian: 4.5 dari 5 bintang4.5/5 (4)
- Electronics All-in-One For Dummies, 3rd EditionDari EverandElectronics All-in-One For Dummies, 3rd EditionPenilaian: 5 dari 5 bintang5/5 (2)
- Operational Amplifier Circuits: Analysis and DesignDari EverandOperational Amplifier Circuits: Analysis and DesignPenilaian: 4.5 dari 5 bintang4.5/5 (2)
- Automotive Electronic Diagnostics (Course 2)Dari EverandAutomotive Electronic Diagnostics (Course 2)Penilaian: 4 dari 5 bintang4/5 (2)
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingDari EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingPenilaian: 4 dari 5 bintang4/5 (1)
- 8051 Microcontroller: An Applications Based IntroductionDari Everand8051 Microcontroller: An Applications Based IntroductionPenilaian: 5 dari 5 bintang5/5 (6)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionDari EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionPenilaian: 4 dari 5 bintang4/5 (331)
- Wearable Sensors: Fundamentals, Implementation and ApplicationsDari EverandWearable Sensors: Fundamentals, Implementation and ApplicationsEdward SazonovBelum ada peringkat
- Winning in 2025: Digital and Data Transformation: The Keys to SuccessDari EverandWinning in 2025: Digital and Data Transformation: The Keys to SuccessBelum ada peringkat
- Power Density: A Key to Understanding Energy Sources and UsesDari EverandPower Density: A Key to Understanding Energy Sources and UsesPenilaian: 4.5 dari 5 bintang4.5/5 (2)
- Lithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsDari EverandLithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsPenilaian: 5 dari 5 bintang5/5 (2)