Anda mungkin juga menyukai
- How to Rebuild & Modify Ford C4 & C6 Automatic TransmissionsDari EverandHow to Rebuild & Modify Ford C4 & C6 Automatic TransmissionsPenilaian: 5 dari 5 bintang5/5 (5)
- Automotive Machining: A Guide to Boring, Decking, Honing & MoreDari EverandAutomotive Machining: A Guide to Boring, Decking, Honing & MorePenilaian: 4.5 dari 5 bintang4.5/5 (11)
- Small Block Chevrolet: Stock and High-Performance RebuildsDari EverandSmall Block Chevrolet: Stock and High-Performance RebuildsPenilaian: 4 dari 5 bintang4/5 (6)
- Operation+Manual English 1Dokumen41 halamanOperation+Manual English 1phoenix6048Belum ada peringkat
- GM Automatic Overdrive Transmission Builder's and Swapper's GuideDari EverandGM Automatic Overdrive Transmission Builder's and Swapper's GuidePenilaian: 4.5 dari 5 bintang4.5/5 (8)
- Performance Exhaust Systems: How to Design, Fabricate, and Install: How to Design, Fabricate, and InstallDari EverandPerformance Exhaust Systems: How to Design, Fabricate, and Install: How to Design, Fabricate, and InstallPenilaian: 4 dari 5 bintang4/5 (8)
- Agitator HandbookDokumen44 halamanAgitator Handbookrajmaneamit100% (1)
- Seleccion y Diseño GerotorDokumen28 halamanSeleccion y Diseño GerotoremersonBelum ada peringkat
- Design Basic of Industrial Gear BoxesDokumen84 halamanDesign Basic of Industrial Gear Boxesalfatih1407497100% (2)
- Mold Maintenance StepDokumen0 halamanMold Maintenance StepMonica JoynerBelum ada peringkat
- VIP45Dokumen92 halamanVIP45Román IsraelBelum ada peringkat
- Power HacksawDokumen30 halamanPower Hacksawbilal shaikh100% (2)
- OpenVentilator - Io Spartan Model DocumentationDokumen96 halamanOpenVentilator - Io Spartan Model DocumentationMarcelo SCIBelum ada peringkat
- Motorised Screw JackDokumen4 halamanMotorised Screw JackhidaiBelum ada peringkat
- ManualDokumen8 halamanManualSanchai ProgaeewBelum ada peringkat
- BIOBASE Table-Type Low Speed Centrifuge BKC-TL4II User Manual 202009Dokumen14 halamanBIOBASE Table-Type Low Speed Centrifuge BKC-TL4II User Manual 202009Gustavo QuispeBelum ada peringkat
- Portable Modular Conveyor Belt Speed Control by Arduino: More Info: @absolutelyautomDokumen47 halamanPortable Modular Conveyor Belt Speed Control by Arduino: More Info: @absolutelyautombubitrubiBelum ada peringkat
- Pneumobot: Sprue Picker RobotDokumen37 halamanPneumobot: Sprue Picker RobotAlfandel VillamartinBelum ada peringkat
- CNC AssemblyDokumen9 halamanCNC AssemblyAnjana_EdathadanBelum ada peringkat
- Microcut Basic ManualDokumen59 halamanMicrocut Basic ManualkrishnajielectricBelum ada peringkat
- How To Make A TribometerDokumen7 halamanHow To Make A TribometerHamza ShamsBelum ada peringkat
- Universal 3 Motor Drilling MachineDokumen6 halamanUniversal 3 Motor Drilling MachineMectrosoft Creative technologyBelum ada peringkat
- Methodology of Special Purpose Spot Facing MachineDokumen5 halamanMethodology of Special Purpose Spot Facing MachineInternational Journal of computational Engineering research (IJCER)Belum ada peringkat
- B.TECH. (5 Semester) Production and Industrial Engineering Pi-319 Vocational Training ReportDokumen10 halamanB.TECH. (5 Semester) Production and Industrial Engineering Pi-319 Vocational Training ReportPraveen UpadhyayBelum ada peringkat
- Automated Drilling MachineDokumen14 halamanAutomated Drilling MachineVardhan ChipperBelum ada peringkat
- High Speed Portable Pipe Cutting MachineDokumen4 halamanHigh Speed Portable Pipe Cutting Machine9527530909100% (1)
- Welding Slag CLEANING MachineDokumen5 halamanWelding Slag CLEANING MachineSuganthan IasBelum ada peringkat
- Topics Page NoDokumen11 halamanTopics Page NoMahathir Mohammad BappyBelum ada peringkat
- LaserCutter Rotary ManualDokumen10 halamanLaserCutter Rotary Manualvajaterp2010Belum ada peringkat
- The C3 Mini Lathe IDokumen3 halamanThe C3 Mini Lathe IAnonymous mKdAfWifBelum ada peringkat
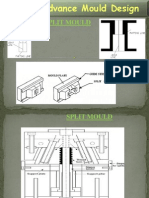
- Advance Mould DesignDokumen35 halamanAdvance Mould DesignKamal Krishna Kashyap100% (6)
- Manual Viscometer Pce Rvi1Dokumen11 halamanManual Viscometer Pce Rvi1emreka82Belum ada peringkat
- Understanding CNC Collet ChucksDokumen5 halamanUnderstanding CNC Collet ChuckssleonBelum ada peringkat
- Lathe Machine 1Dokumen22 halamanLathe Machine 1James UgbesBelum ada peringkat
- (IJET-V1I2P4) Authors :mrs - Rita S. Pimpalkar, Rutuja U. Joshi, Rakesh R. Khandare, Rounak R. Agarwal, Bhushan S. BendaleDokumen8 halaman(IJET-V1I2P4) Authors :mrs - Rita S. Pimpalkar, Rutuja U. Joshi, Rakesh R. Khandare, Rounak R. Agarwal, Bhushan S. BendaleInternational Journal of Engineering and TechniquesBelum ada peringkat
- Automation in BurnishingDokumen3 halamanAutomation in BurnishingdizzilionBelum ada peringkat
- Final Paper Simulation Group Project V1.3Dokumen14 halamanFinal Paper Simulation Group Project V1.3maartenBelum ada peringkat
- AcknowledgementsDokumen55 halamanAcknowledgementsFARAZ NOORBelum ada peringkat
- Drilling ReportDokumen8 halamanDrilling ReportThe white lionBelum ada peringkat
- LDMS Smed SbubDokumen16 halamanLDMS Smed SbubsmitaBelum ada peringkat
- 2020me518 MomDokumen43 halaman2020me518 MomMuhammad HammadBelum ada peringkat
- Eight Steps or Principles For SMEDDokumen3 halamanEight Steps or Principles For SMEDAlex SalazBelum ada peringkat
- CF1711 - Trocador AtcDokumen24 halamanCF1711 - Trocador Atcmec04162Belum ada peringkat
- Case Study of Core and Pluge PreparationDokumen9 halamanCase Study of Core and Pluge PreparationSpeculeBelum ada peringkat
- Xy CoordinatorDokumen33 halamanXy Coordinatorsuraj dhulannavarBelum ada peringkat
- Industrial Training Presentation-1 On Rajkot, Gujarat: ProtecDokumen31 halamanIndustrial Training Presentation-1 On Rajkot, Gujarat: ProtecJAY KACHABelum ada peringkat
- First Block of Projects M3Dokumen22 halamanFirst Block of Projects M3JapaniSBelum ada peringkat
- Heavy Industries Taxila: Internship ReportDokumen31 halamanHeavy Industries Taxila: Internship ReportAnonymous gbP4kU5w3Belum ada peringkat
- Multi Nut Tightner-ReportDokumen26 halamanMulti Nut Tightner-ReportBrightchip Technologies100% (1)
- Report On Workshop Mini ProjectDokumen5 halamanReport On Workshop Mini ProjectSajad KhanBelum ada peringkat
- Gorman Star Winding Machine Operator'S ManualDokumen32 halamanGorman Star Winding Machine Operator'S Manualshafqat ullahBelum ada peringkat
- Proto Copy Finale DraeteDokumen60 halamanProto Copy Finale DraeteAjinkya MoreBelum ada peringkat
- CNC Turning CentreDokumen10 halamanCNC Turning CentreArun100% (1)
- Automatic Break in Hill StationDokumen25 halamanAutomatic Break in Hill Stationsuraj dhulannavarBelum ada peringkat
- Design and Static Analysis of Gearbox For A CNCDokumen9 halamanDesign and Static Analysis of Gearbox For A CNCأحمد دعبسBelum ada peringkat
- Catalogue: Lifting and Installation of MachineDokumen24 halamanCatalogue: Lifting and Installation of MachineGocha KakhniashviliBelum ada peringkat
- Minor Final - PPTDokumen20 halamanMinor Final - PPTHRISHABH CHOPRABelum ada peringkat
- Portable Drilling MachineDokumen34 halamanPortable Drilling Machinechandrajanani05Belum ada peringkat
- AUTOMATIC PIPE CUTTING MACHINE EditedDokumen25 halamanAUTOMATIC PIPE CUTTING MACHINE EditedrajeshBelum ada peringkat
- Prompting Science and Engineering Students in Practical TrigonometryDari EverandPrompting Science and Engineering Students in Practical TrigonometryBelum ada peringkat
- How to Run a Lathe - Volume I (Edition 43) The Care and Operation of a Screw-Cutting LatheDari EverandHow to Run a Lathe - Volume I (Edition 43) The Care and Operation of a Screw-Cutting LathePenilaian: 4.5 dari 5 bintang4.5/5 (2)
- Using A Wet Film ThicknessDokumen2 halamanUsing A Wet Film ThicknesssanoopvkBelum ada peringkat
- Load ScheduleDokumen8 halamanLoad SchedulemerebookBelum ada peringkat
- The Sparkle EffectDokumen22 halamanThe Sparkle EffectVida Betances-ReyesBelum ada peringkat
- CH Six Global Transportation Planning and ExecutionDokumen41 halamanCH Six Global Transportation Planning and ExecutionDsh ShBelum ada peringkat
- Balmatech Go Ep Tds 2022-03 GBDokumen2 halamanBalmatech Go Ep Tds 2022-03 GBAnalista De CalidadBelum ada peringkat
- 5 Kingdoms of OrganismsDokumen13 halaman5 Kingdoms of OrganismsChoirul Anam100% (2)
- Academic Program Required Recommended Academic Program Required RecommendedDokumen1 halamanAcademic Program Required Recommended Academic Program Required Recommendedonur scribdBelum ada peringkat
- Lesson 24 - Laminate Modeling - Rev C PDFDokumen20 halamanLesson 24 - Laminate Modeling - Rev C PDFraduga_fbBelum ada peringkat
- Know Thyself - Jnana Yoga - Par - Omraam Mikhael AivanhovDokumen314 halamanKnow Thyself - Jnana Yoga - Par - Omraam Mikhael AivanhovPedro Ribeiro100% (5)
- TRL Explanations - 1Dokumen4 halamanTRL Explanations - 1Ana DulceBelum ada peringkat
- Engineering Drawings and Plans: Engr. Rolly S. TambeDokumen4 halamanEngineering Drawings and Plans: Engr. Rolly S. TambeFred Joseph G. AlacayanBelum ada peringkat
- Catalogue Mp200Dokumen33 halamanCatalogue Mp200Adrian TudorBelum ada peringkat
- EV Connect What Is EVSE White PaperDokumen13 halamanEV Connect What Is EVSE White PaperEV ConnectBelum ada peringkat
- Quiz - Ionic EquilibriumDokumen2 halamanQuiz - Ionic EquilibriumSiddBelum ada peringkat
- Cad, CamDokumen16 halamanCad, CamRakhi Mol BVBelum ada peringkat
- Oertel - Extracts From The Jāiminīya-Brāhma A and Upanishad-Brāhma A, Parallel To Passages of TheDokumen20 halamanOertel - Extracts From The Jāiminīya-Brāhma A and Upanishad-Brāhma A, Parallel To Passages of Thespongebob2812Belum ada peringkat
- Nature 00869Dokumen3 halamanNature 00869鍾宗霖Belum ada peringkat
- Purgatory and The AbsoluteDokumen18 halamanPurgatory and The AbsoluteCarla MissionaBelum ada peringkat
- Stock+List 6ct8.3g2 Esn#30549237 Cpl#2218 GeneradorDokumen34 halamanStock+List 6ct8.3g2 Esn#30549237 Cpl#2218 GeneradorAlexis SanchezBelum ada peringkat
- Materi B.inggris SMP Kelas 9 Kurikulum 2013Dokumen21 halamanMateri B.inggris SMP Kelas 9 Kurikulum 2013Siti DianurBelum ada peringkat
- Notes Ch. 4 - Folk and Popular CultureDokumen7 halamanNotes Ch. 4 - Folk and Popular CultureVienna WangBelum ada peringkat
- Course Specification Course Title: Basic Architectural DraftingDokumen1 halamanCourse Specification Course Title: Basic Architectural DraftingDinah Fe Tabaranza-OlitanBelum ada peringkat
- 9 Daftar Pustaka VaricelaDokumen2 halaman9 Daftar Pustaka VaricelaAfrina FaziraBelum ada peringkat
- HPLC Columns by SciencixDokumen49 halamanHPLC Columns by SciencixBrett HarrisBelum ada peringkat
- 6RA80 Quick Commissioning Without TachoDokumen7 halaman6RA80 Quick Commissioning Without TachoBaldev SinghBelum ada peringkat
- Samsung Bd-p4600 SMDokumen101 halamanSamsung Bd-p4600 SMIonel CociasBelum ada peringkat
- Ingles y Español Unidad 7Dokumen9 halamanIngles y Español Unidad 7Pier Jhoani Ñañez LlanosBelum ada peringkat
- Ansi/Isa - 75.08.04-2001 (R2013) Face-to-Face Dimensions For Buttweld-End Globe-Style Control Valves (Class 4500)Dokumen16 halamanAnsi/Isa - 75.08.04-2001 (R2013) Face-to-Face Dimensions For Buttweld-End Globe-Style Control Valves (Class 4500)Horas CanmanBelum ada peringkat