Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- OutputDokumen2 halamanOutputJalla RaviBelum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Higher Algebra - Hall & KnightDokumen593 halamanHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Higher Algebra - Hall & KnightDokumen593 halamanHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Higher Algebra - Hall & KnightDokumen593 halamanHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Akruti Marathi MultiFont Engine ReadmeDokumen22 halamanAkruti Marathi MultiFont Engine Readmenmshingote2779% (38)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Iso 6336 5 2016Dokumen54 halamanIso 6336 5 2016Кирилл100% (2)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Mae 1202: Aerospace Practicum: Lecture 4: Introduction To Basic Aerodynamics 3Dokumen38 halamanMae 1202: Aerospace Practicum: Lecture 4: Introduction To Basic Aerodynamics 3زهديابوانسBelum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Option MCQ-Human Resource Management (205) : Clarifying Handling People Maintaing Relationship (C) Both (A) and (B)Dokumen4 halamanOption MCQ-Human Resource Management (205) : Clarifying Handling People Maintaing Relationship (C) Both (A) and (B)MukulBelum ada peringkat
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Chapter 5 (6) Concrete MaterialDokumen134 halamanChapter 5 (6) Concrete Materialraju_420034520Belum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Uniden Bearcat Scanner BC365CRS Owners ManualDokumen32 halamanUniden Bearcat Scanner BC365CRS Owners ManualBenjamin DoverBelum ada peringkat
- Pro-Watch Ecosystem: The Power of TheDokumen1 halamanPro-Watch Ecosystem: The Power of TheNik SiagBelum ada peringkat
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Reviewer in Contact Center Services NC IIDokumen12 halamanReviewer in Contact Center Services NC IIRonalei TañedoBelum ada peringkat
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- AbstractDokumen1 halamanAbstractJignesh PrajapatiBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- 2020 Sec 4 E Math SA2 Anderson Secondary-pages-DeletedDokumen41 halaman2020 Sec 4 E Math SA2 Anderson Secondary-pages-Deletedregi naBelum ada peringkat
- TLE Curriculum MatrixDokumen3 halamanTLE Curriculum MatrixJerrymi TandogBelum ada peringkat
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Ballsim DirectDokumen58 halamanBallsim DirectDiego GaliciaBelum ada peringkat
- Intellectual Property Rights: Indian PerspectiveDokumen20 halamanIntellectual Property Rights: Indian PerspectiveFateh Singh RawatBelum ada peringkat
- JRX118SP SpecsheetDokumen2 halamanJRX118SP SpecsheetLuisBelum ada peringkat
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Resume MullinsDokumen4 halamanResume Mullinsapi-236735643Belum ada peringkat
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Elephant Catalog V13 PDFDokumen96 halamanElephant Catalog V13 PDFsamuelBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Computer Typing History of TypingDokumen9 halamanComputer Typing History of TypingRamBelum ada peringkat
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- 67 - Es - Ut Republic Csalamade BooDokumen47 halaman67 - Es - Ut Republic Csalamade BooTyler LeeBelum ada peringkat
- 4 MFL67658602 00 160519 1Dokumen329 halaman4 MFL67658602 00 160519 1Cédric MorisotBelum ada peringkat
- 78-SAFETY - QUESTIO in PDFDokumen21 halaman78-SAFETY - QUESTIO in PDFIndermohan MehtaBelum ada peringkat
- IEC Certification Kit: Model-Based Design For EN 50128Dokumen31 halamanIEC Certification Kit: Model-Based Design For EN 50128Ícaro VianaBelum ada peringkat
- Surge CounterDokumen2 halamanSurge CounterJavier CuzcoBelum ada peringkat
- 01-Toy Product DesignDokumen54 halaman01-Toy Product DesignJuanBelum ada peringkat
- (Revised) Dale Carnegie-How To Win Friends and Influence People-Simon and Schuster (1981)Dokumen12 halaman(Revised) Dale Carnegie-How To Win Friends and Influence People-Simon and Schuster (1981)TomasUreñaBelum ada peringkat
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Learner's Book Answers: Unit 1 CellsDokumen31 halamanLearner's Book Answers: Unit 1 CellsLyaz Antony91% (91)
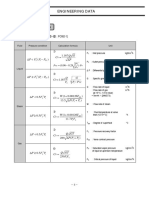
- Engineering Data: 2. CV CalculationDokumen1 halamanEngineering Data: 2. CV Calculationdj22500Belum ada peringkat
- Enabling Secure Broadband Access Anywhere Anytime Access Anywhere, AnytimeDokumen4 halamanEnabling Secure Broadband Access Anywhere Anytime Access Anywhere, AnytimeEmmanuelBelum ada peringkat
- Basic - Concepts - in - Pharmaceutical - Care CLINICAL PHARMACYDokumen17 halamanBasic - Concepts - in - Pharmaceutical - Care CLINICAL PHARMACYPrincess RonsableBelum ada peringkat
- Swot Analysis of Revlon IncDokumen5 halamanSwot Analysis of Revlon IncSubhana AsimBelum ada peringkat
- Fi̇z 137-CH 1-Measurement PDFDokumen27 halamanFi̇z 137-CH 1-Measurement PDFkaskoskasBelum ada peringkat
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)