Anda mungkin juga menyukai
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Iso 16232 10 2007 en PDFDokumen8 halamanIso 16232 10 2007 en PDFyağmurBelum ada peringkat
- Packing List For GermanyDokumen2 halamanPacking List For GermanyarjungangadharBelum ada peringkat
- Bulletin - February 12, 2012Dokumen14 halamanBulletin - February 12, 2012ppranckeBelum ada peringkat
- This Study Resource Was: MCV4U Exam ReviewDokumen9 halamanThis Study Resource Was: MCV4U Exam ReviewNathan WaltonBelum ada peringkat
- 12.3 What Is The Nomenclature System For CFCS/HCFCS/HFCS? (Chemistry)Dokumen3 halaman12.3 What Is The Nomenclature System For CFCS/HCFCS/HFCS? (Chemistry)Riska IndriyaniBelum ada peringkat
- Fluid Mechanics HydraulicsDokumen420 halamanFluid Mechanics Hydraulicsanonymousdi3noBelum ada peringkat
- Firststep To AlaskaDokumen28 halamanFirststep To AlaskaBarbara NelsonBelum ada peringkat
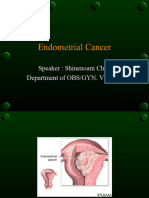
- 陳v Endometrial Cancer 2Dokumen48 halaman陳v Endometrial Cancer 201范芷紜Belum ada peringkat
- David Sacks Resume February 16 2015Dokumen1 halamanDavid Sacks Resume February 16 2015api-279280948Belum ada peringkat
- Resume LittletonDokumen1 halamanResume Littletonapi-309466005Belum ada peringkat
- Homeopatia Vibracional RatesDokumen45 halamanHomeopatia Vibracional RatesAugusto Bd100% (4)
- High School Department PAASCU Accredited Academic Year 2017 - 2018Dokumen6 halamanHigh School Department PAASCU Accredited Academic Year 2017 - 2018Kevin T. OnaroBelum ada peringkat
- 2012 Karshaniya YavaguDokumen4 halaman2012 Karshaniya YavaguRANJEET SAWANTBelum ada peringkat
- LEARNING ACTIVITY SHEET in Oral CommDokumen4 halamanLEARNING ACTIVITY SHEET in Oral CommTinTin100% (1)
- Climate Declaration: For White Corex PlasterboardDokumen1 halamanClimate Declaration: For White Corex PlasterboardAbdullah BeckerBelum ada peringkat
- Charging Station For E-Vehicle Using Solar With IOTDokumen6 halamanCharging Station For E-Vehicle Using Solar With IOTjakeBelum ada peringkat
- Beyond The Breech Trial. Maggie BanksDokumen4 halamanBeyond The Breech Trial. Maggie Bankspurpleanvil100% (2)
- NBCC 2015 Seismic Design Examples in S-FRAME AnalysisDokumen91 halamanNBCC 2015 Seismic Design Examples in S-FRAME AnalysisMike Smith100% (1)
- Bo Sanchez-Turtle Always Wins Bo SanchezDokumen31 halamanBo Sanchez-Turtle Always Wins Bo SanchezCristy Louela Pagapular88% (8)
- The Roti Canai StoryDokumen5 halamanThe Roti Canai StoryDr Bugs TanBelum ada peringkat
- History of The Hadith, Dr. Muhammad HameedullahDokumen0 halamanHistory of The Hadith, Dr. Muhammad HameedullahAMEEN AKBAR100% (4)
- Lay Planning TypesDokumen1 halamanLay Planning TypesGaurav Shakya100% (1)
- Electrostatics Practice ProblemsDokumen4 halamanElectrostatics Practice ProblemsMohammed Aftab AhmedBelum ada peringkat
- The Sword and The Exquisiteness PDFDokumen1.437 halamanThe Sword and The Exquisiteness PDFTaruna UnitaraliBelum ada peringkat
- Equipment Maintenance and Measuring Equipment ProcedureDokumen2 halamanEquipment Maintenance and Measuring Equipment ProcedureRaja Mani100% (1)
- Contents of HvacDokumen2 halamanContents of Hvaclijo johnBelum ada peringkat
- Bhagavatam English Chapter 10bDokumen22 halamanBhagavatam English Chapter 10bsrimatsimhasaneshwarBelum ada peringkat
- Lesson Plan - Sight Word ObservationDokumen2 halamanLesson Plan - Sight Word Observationapi-253277023Belum ada peringkat
- English Lesson Plan Form 4 (Literature: "The Living Photograph")Dokumen2 halamanEnglish Lesson Plan Form 4 (Literature: "The Living Photograph")Maisarah Mohamad100% (3)
- Task 3: New - HTMLDokumen12 halamanTask 3: New - HTMLGONELA SAI LOKESH (RA2011028010100)Belum ada peringkat