Anda mungkin juga menyukai
- Controle De Motor De Passo Unipolar E Bipolar Com Base No Pic18f1220 E MikrocDari EverandControle De Motor De Passo Unipolar E Bipolar Com Base No Pic18f1220 E MikrocBelum ada peringkat
- Drive Profile DeviceNet CFW-09Dokumen22 halamanDrive Profile DeviceNet CFW-09ronaldoBelum ada peringkat
- v20 Opi PT-PB PT-BRDokumen326 halamanv20 Opi PT-PB PT-BRIvan RodrigoBelum ada peringkat
- Sinus K SW PoDokumen208 halamanSinus K SW PoFryntonoBelum ada peringkat
- Drive DC compacto DCS 400 manualDokumen202 halamanDrive DC compacto DCS 400 manualFelipe Lorenzi100% (1)
- PT - Acs550 - 01 - Um - F - Inversor de Frequência AbbDokumen302 halamanPT - Acs550 - 01 - Um - F - Inversor de Frequência AbbGerenciamentoBelum ada peringkat
- Comunicação PLC MPC4004 e Inversor ATV71Dokumen11 halamanComunicação PLC MPC4004 e Inversor ATV71oribataBelum ada peringkat
- OPERAÇÃO Sinumerik 840dDokumen486 halamanOPERAÇÃO Sinumerik 840dedsonfurlaniBelum ada peringkat
- AltaBlue 15 30 50 100 - SapekaDokumen252 halamanAltaBlue 15 30 50 100 - SapekaClaudio Lourenço da SilvaBelum ada peringkat
- Manual Multimedidor de Grandezas Elétricas MRI TF 92 RenzDokumen17 halamanManual Multimedidor de Grandezas Elétricas MRI TF 92 RenzRenz Multimedidores e Controladores de PotênciaBelum ada peringkat
- VLT Drive FC102 - Design Guide PDFDokumen210 halamanVLT Drive FC102 - Design Guide PDFribeirofabianoBelum ada peringkat
- IHM Guia Essencial-2011Dokumen40 halamanIHM Guia Essencial-2011Pedro BarbosaBelum ada peringkat
- Válvula direcional proporcional 4WRK/EDokumen20 halamanVálvula direcional proporcional 4WRK/EEduardo AugustoBelum ada peringkat
- Ai-123-Primeiros Passos Programacao Step7Dokumen32 halamanAi-123-Primeiros Passos Programacao Step7Valdir DerlannBelum ada peringkat
- C-18 ManualDokumen31 halamanC-18 ManualFabio Ramiro33% (3)
- Motion Control USB Card ConfiguraçãoDokumen33 halamanMotion Control USB Card ConfiguraçãoGeison Barroso100% (1)
- Atualização WinSUP v2.53Dokumen6 halamanAtualização WinSUP v2.53stgpereiraBelum ada peringkat
- MCD600 Data SheetDokumen2 halamanMCD600 Data SheetAlisson DiasBelum ada peringkat
- Manual MOD22X2 PDFDokumen24 halamanManual MOD22X2 PDFjcadvBelum ada peringkat
- PT Acs800 Standard FW IDokumen272 halamanPT Acs800 Standard FW Imodelador3dBelum ada peringkat
- WEG Sca06 Manual de Programacao 10000662686 1.4x Manual Portugues BR PDFDokumen106 halamanWEG Sca06 Manual de Programacao 10000662686 1.4x Manual Portugues BR PDFPaulo Cesar ChemelloBelum ada peringkat
- Especificações técnicas controlador temperatura display duploDokumen2 halamanEspecificações técnicas controlador temperatura display duploTiago LeiteBelum ada peringkat
- WEG Wps Software Programacao Weg 10001027753 2.0x Manual Portugues BRDokumen554 halamanWEG Wps Software Programacao Weg 10001027753 2.0x Manual Portugues BRSideparBelum ada peringkat
- Painel MensagensDokumen29 halamanPainel MensagensElton LomboniBelum ada peringkat
- Manual Inversor Abb Acs350 PDFDokumen282 halamanManual Inversor Abb Acs350 PDFAlfredomsjBelum ada peringkat
- Coel Temporizador HWYDokumen2 halamanCoel Temporizador HWYWilliam N. CalfaBelum ada peringkat
- Chloride 80-Net Usermanual For PortugueseDokumen118 halamanChloride 80-Net Usermanual For PortugueseCleiton SouzaBelum ada peringkat
- 1579538804catalogo Ti310 PorDokumen4 halaman1579538804catalogo Ti310 PorcccortizoBelum ada peringkat
- CFW11 Manual de Programação Do Modulo de Expansao plc11 V1.0x PDFDokumen29 halamanCFW11 Manual de Programação Do Modulo de Expansao plc11 V1.0x PDFricardoBelum ada peringkat
- Manual Operacional Alinhador FIFEDokumen124 halamanManual Operacional Alinhador FIFEcarloshunt50% (2)
- Smart Cap 200 Controlador de Fator de Potência. Manual de Instalação e Operação. Julho-2011Dokumen34 halamanSmart Cap 200 Controlador de Fator de Potência. Manual de Instalação e Operação. Julho-2011Diego Selli100% (1)
- VLT 3000 Series Portugues PDFDokumen156 halamanVLT 3000 Series Portugues PDFDiego ManfrediniBelum ada peringkat
- PTBR Acs380 FW D A5Dokumen546 halamanPTBR Acs380 FW D A5deusimarBelum ada peringkat
- Errata - Ndu 01Dokumen178 halamanErrata - Ndu 01Renan EcoPowerBelum ada peringkat
- Manual Técnico SR30A-48V - 09 Rev - A6 PDFDokumen42 halamanManual Técnico SR30A-48V - 09 Rev - A6 PDFMaicon Vinicius NunesBelum ada peringkat
- WEG SSW07 User Manual 0899.5832 en Es PTDokumen56 halamanWEG SSW07 User Manual 0899.5832 en Es PTJoao VianaBelum ada peringkat
- Advan 10Dokumen19 halamanAdvan 10mauroschillingBelum ada peringkat
- Manual DCY-2050 - 51 - 60 Light EM0010-10Dokumen56 halamanManual DCY-2050 - 51 - 60 Light EM0010-10Renan InácioBelum ada peringkat
- Coel Tlk49Dokumen20 halamanCoel Tlk49Essilor_WdealmeiBelum ada peringkat
- Manual de instruções para programação do Unidrive SPDokumen11 halamanManual de instruções para programação do Unidrive SPAnonymous ugCWo0Acz3100% (2)
- Piovan Sseries PTDokumen2 halamanPiovan Sseries PTcaf1024Belum ada peringkat
- Easy Gen 3200 DiagramaDokumen4 halamanEasy Gen 3200 DiagramaAlexandre PereiraBelum ada peringkat
- Man UMILINE V7.20Dokumen15 halamanMan UMILINE V7.20Diego RodriguesBelum ada peringkat
- Manual Citrino ToolsDokumen114 halamanManual Citrino ToolsValberto AraujoBelum ada peringkat
- EASB LAE-800 PTDokumen20 halamanEASB LAE-800 PTRanderson RezierBelum ada peringkat
- CLP Expert BF SchneiderDokumen4 halamanCLP Expert BF SchneiderlgbsousaBelum ada peringkat
- Configuração da função tubo vazio em conversores KrohneDokumen1 halamanConfiguração da função tubo vazio em conversores KrohneJosé Carlos RibeiroBelum ada peringkat
- WEG CFW 11 Manual Do Usuario Mec. e 10000256340 Manual Portugues BRDokumen86 halamanWEG CFW 11 Manual Do Usuario Mec. e 10000256340 Manual Portugues BRWillian Roberto PeixerBelum ada peringkat
- Manual Técnico Centrais DigitaisDokumen24 halamanManual Técnico Centrais DigitaisRomário CaribéBelum ada peringkat
- Manual EB 3015Dokumen10 halamanManual EB 3015fernandoCmacedoBelum ada peringkat
- Manual de Instruções: Cae-FDokumen52 halamanManual de Instruções: Cae-FMauricioDinizBelum ada peringkat
- SSH5 Sensor Hall para segurançaDokumen1 halamanSSH5 Sensor Hall para segurançaFelipe GodinhoBelum ada peringkat
- Manual Do Citrino Tools v.1.0 OKDokumen192 halamanManual Do Citrino Tools v.1.0 OKAna Maria Daza AnteloBelum ada peringkat
- Manual Extractor 54Dokumen56 halamanManual Extractor 54Juan Carlos Alvarez RojasBelum ada peringkat
- Relé Inteligente SRW01Dokumen20 halamanRelé Inteligente SRW01not bookBelum ada peringkat
- Brastemp Coifa BAF10AR Manual Versao Digital-1Dokumen24 halamanBrastemp Coifa BAF10AR Manual Versao Digital-1André Luis K BomfimBelum ada peringkat
- Manual do sistema de enlace de rádio SDH 1xSTM-1Dokumen332 halamanManual do sistema de enlace de rádio SDH 1xSTM-1gbaeta100% (1)
- Programação básica de CLP com memórias internas e simulação de 3 motoresDokumen63 halamanProgramação básica de CLP com memórias internas e simulação de 3 motoresWesley DavidBelum ada peringkat
- Desenvolvendo Uma Interface Ihm Modbus Tcp/ip No ArduinoDari EverandDesenvolvendo Uma Interface Ihm Modbus Tcp/ip No ArduinoBelum ada peringkat
- Manual de Utilizacao Serie Phase PDFDokumen129 halamanManual de Utilizacao Serie Phase PDFbrunoBelum ada peringkat
- Como Utilizar A Ferramenta TRACE Do MasterTool IEC XE - Tutoriais - Base de Conhecimento - Altus6Dokumen1 halamanComo Utilizar A Ferramenta TRACE Do MasterTool IEC XE - Tutoriais - Base de Conhecimento - Altus6Rafael BispoBelum ada peringkat
- Como Utilizar A Ferramenta TRACE Do MasterTool IEC XE - Tutoriais - Base de Conhecimento - Altus5Dokumen1 halamanComo Utilizar A Ferramenta TRACE Do MasterTool IEC XE - Tutoriais - Base de Conhecimento - Altus5Rafael BispoBelum ada peringkat
- Folder Nexto Xpress5Dokumen2 halamanFolder Nexto Xpress5Rafael BispoBelum ada peringkat
- Folder Nexto Xpress5Dokumen2 halamanFolder Nexto Xpress5Rafael BispoBelum ada peringkat
- Como Utilizar A Ferramenta TRACE Do MasterTool IEC XE - Tutoriais - Base de Conhecimento - AltusDokumen1 halamanComo Utilizar A Ferramenta TRACE Do MasterTool IEC XE - Tutoriais - Base de Conhecimento - AltusRafael BispoBelum ada peringkat
- Como Utilizar A Ferramenta TRACE Do MasterTool IEC XE - Tutoriais - Base de Conhecimento - Altus2Dokumen1 halamanComo Utilizar A Ferramenta TRACE Do MasterTool IEC XE - Tutoriais - Base de Conhecimento - Altus2Rafael BispoBelum ada peringkat
- Apresentacao Blueplant PDFDokumen38 halamanApresentacao Blueplant PDFRosimberg Souza SilvaBelum ada peringkat
- Como utilizar o TRACE no MasterTool IEC XEDokumen1 halamanComo utilizar o TRACE no MasterTool IEC XERafael BispoBelum ada peringkat
- Como Utilizar A Ferramenta TRACE Do MasterTool IEC XE - Tutoriais - Base de Conhecimento - Altus4Dokumen1 halamanComo Utilizar A Ferramenta TRACE Do MasterTool IEC XE - Tutoriais - Base de Conhecimento - Altus4Rafael BispoBelum ada peringkat
- Como Utilizar A Ferramenta TRACE Do MasterTool IEC XE - Tutoriais - Base de Conhecimento - Altus5Dokumen1 halamanComo Utilizar A Ferramenta TRACE Do MasterTool IEC XE - Tutoriais - Base de Conhecimento - Altus5Rafael BispoBelum ada peringkat
- Folder Nexto Xpress5Dokumen2 halamanFolder Nexto Xpress5Rafael BispoBelum ada peringkat
- SLC420 E/r1210 30 69 RFBDokumen4 halamanSLC420 E/r1210 30 69 RFBRafael BispoBelum ada peringkat
- SLC420 E/r1210 30 69 RFBDokumen4 halamanSLC420 E/r1210 30 69 RFBRafael BispoBelum ada peringkat
- Folder Nexto Xpress5Dokumen2 halamanFolder Nexto Xpress5Rafael BispoBelum ada peringkat
- Manual 2710 PDokumen49 halamanManual 2710 PAlan FelipiBelum ada peringkat
- Folder Nexto XpressDokumen2 halamanFolder Nexto XpressRafael BispoBelum ada peringkat
- SLC420 E/r1210 30 69 RFBDokumen4 halamanSLC420 E/r1210 30 69 RFBRafael BispoBelum ada peringkat
- BluePlant SCADA SoftwareDokumen13 halamanBluePlant SCADA SoftwareRafael BispoBelum ada peringkat
- SLC420 E/r1210 30 69 RFBDokumen4 halamanSLC420 E/r1210 30 69 RFBRafael BispoBelum ada peringkat
- SLC420 E/r1210 30 69 RFBDokumen4 halamanSLC420 E/r1210 30 69 RFBRafael BispoBelum ada peringkat
- SLC420 E/r1210 30 69 RFBDokumen4 halamanSLC420 E/r1210 30 69 RFBRafael BispoBelum ada peringkat
- SLC420 e - R1210 30 69 RFBDokumen4 halamanSLC420 e - R1210 30 69 RFBRafael BispoBelum ada peringkat
- Como Utilizar A Ferramenta TRACE Do MasterTool IEC XE - Tutoriais - Base de Conhecimento - AltusDokumen5 halamanComo Utilizar A Ferramenta TRACE Do MasterTool IEC XE - Tutoriais - Base de Conhecimento - AltusRafael BispoBelum ada peringkat
- Manual Kit AvançadoDokumen159 halamanManual Kit AvançadoAdilson J. de Assis0% (1)
- Dem Moveis 2Dokumen8 halamanDem Moveis 2Rafael BispoBelum ada peringkat
- Apresentacao Blueplant PDFDokumen38 halamanApresentacao Blueplant PDFRosimberg Souza SilvaBelum ada peringkat
- Vedacit VedaprenDokumen4 halamanVedacit VedaprenRafael BispoBelum ada peringkat
- 0045 MN 12 A PDFDokumen26 halaman0045 MN 12 A PDFMario Plinio CrivelliBelum ada peringkat
- Parque industrial de 95.000m2 com capacidade de 120.000 peçasDokumen44 halamanParque industrial de 95.000m2 com capacidade de 120.000 peçasRafael BispoBelum ada peringkat
- Osram - Lampadas CatalogoDokumen13 halamanOsram - Lampadas CatalogoEliana CostaBelum ada peringkat
- Exemplo Plano de EstágioDokumen4 halamanExemplo Plano de EstágioLucasOliveira100% (2)
- Biblia LinuxDokumen7 halamanBiblia LinuxJose Geraldo Fernandes Alves50% (2)
- Instalações Prediais - Elétricas - Anotação de Aula Ver 2 PDFDokumen51 halamanInstalações Prediais - Elétricas - Anotação de Aula Ver 2 PDFRicardo OliveiraBelum ada peringkat
- FICHA DE SEGURAN+çA MODELO 04 (IND+ÜSTRIA, OFICINAS E ARMAZ+ëNS)Dokumen5 halamanFICHA DE SEGURAN+çA MODELO 04 (IND+ÜSTRIA, OFICINAS E ARMAZ+ëNS)Daniel AraujoBelum ada peringkat
- Procedimento para operação de empilhadeirasDokumen2 halamanProcedimento para operação de empilhadeirasMauro SantosBelum ada peringkat
- UN 6 - Avaliação Objetiva - Revisão Da TentativaDokumen6 halamanUN 6 - Avaliação Objetiva - Revisão Da TentativaFernando SteerBelum ada peringkat
- Manual P7i45gc MDokumen24 halamanManual P7i45gc MSandro de Aguiar100% (2)
- VRV206ADokumen20 halamanVRV206ARenaldo PetlimBelum ada peringkat
- Lista de exercícios de conversão de unidades e problemas de Mecânica dos FluidosDokumen3 halamanLista de exercícios de conversão de unidades e problemas de Mecânica dos FluidosGabriela De JesusBelum ada peringkat
- Projeto Executivo DrenagemDokumen10 halamanProjeto Executivo DrenagemEdgar SchlickmannBelum ada peringkat
- Calorimetria: determinação da capacidade calorífica de um calorímetroDokumen12 halamanCalorimetria: determinação da capacidade calorífica de um calorímetroGabriella GabyBelum ada peringkat
- N-2785 - Monitoramento Corrosão Interna em Dutos (Out 2004)Dokumen60 halamanN-2785 - Monitoramento Corrosão Interna em Dutos (Out 2004)seltonjapaoBelum ada peringkat
- Elucidando o Estado VibracionalDokumen32 halamanElucidando o Estado VibracionalJohn Sue100% (2)
- Fundamentos Da MicrosDokumen18 halamanFundamentos Da MicrosAna Carolina RizziBelum ada peringkat
- Diagnóstico Common Rail - Conceitos e EstratégiasDokumen4 halamanDiagnóstico Common Rail - Conceitos e EstratégiasForteLub100% (1)
- Função Trafego Controlado C3000Dokumen12 halamanFunção Trafego Controlado C3000Dioney AfonsoBelum ada peringkat
- Catálogo-GP 050 LXDokumen6 halamanCatálogo-GP 050 LXLuis Eduardo Zampar FilhoBelum ada peringkat
- Exercicios Resolvidos Aula 1 PDFDokumen17 halamanExercicios Resolvidos Aula 1 PDFEliseteBelum ada peringkat
- Ficha de Segurança de Fluido de Corte para AlumínioDokumen10 halamanFicha de Segurança de Fluido de Corte para AlumínioDarly SouzaBelum ada peringkat
- CRONOS 7023L - Catlogo PDFDokumen5 halamanCRONOS 7023L - Catlogo PDFJoão H. BandeiraBelum ada peringkat
- Restauro Científico de Gustavo GiovannoniDokumen4 halamanRestauro Científico de Gustavo GiovannonilcresadBelum ada peringkat
- Riscos carpinteiro análiseDokumen3 halamanRiscos carpinteiro análiseKatia SardinhaBelum ada peringkat
- Lista de Física 2 com 12 questõesDokumen3 halamanLista de Física 2 com 12 questõesMario PachecoBelum ada peringkat
- Slides-Carlos Heuser - Projecto de Banco de DadosDokumen32 halamanSlides-Carlos Heuser - Projecto de Banco de DadosadilsoncrenteBelum ada peringkat
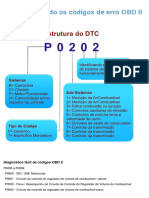
- Compreendendo Os Códigos de Erro OBD IIDokumen121 halamanCompreendendo Os Códigos de Erro OBD IIAnderson JúniorBelum ada peringkat
- Astrocoderfund 27 Anoaula 008 QFD 8031Dokumen8 halamanAstrocoderfund 27 Anoaula 008 QFD 8031Lead0% (1)
- Creager ExemploDokumen6 halamanCreager ExemploRodrigues NetoBelum ada peringkat
- Resumo SODokumen35 halamanResumo SOCarlosBelum ada peringkat
- Manual SMC-TSMC 104-108S-L-EDokumen207 halamanManual SMC-TSMC 104-108S-L-Elorenanegromonte97Belum ada peringkat