Anda mungkin juga menyukai
- NewSyllabus 16420207601685Dokumen2 halamanNewSyllabus 16420207601685Gagandeep KaurBelum ada peringkat
- Implementing and Analyzing Cooperative Communication in Low Power Wide Area Iot NetworkDokumen1 halamanImplementing and Analyzing Cooperative Communication in Low Power Wide Area Iot NetworkGagandeep KaurBelum ada peringkat
- Declaration of Competing InterestsDokumen1 halamanDeclaration of Competing InterestsGagandeep KaurBelum ada peringkat
- Sciencedirect: TM 5 TMDokumen6 halamanSciencedirect: TM 5 TMGagandeep KaurBelum ada peringkat
- Communications Systems: The Topics Within This Unit AreDokumen56 halamanCommunications Systems: The Topics Within This Unit AreGagandeep KaurBelum ada peringkat
- Baseband Pulse and Digital SignalingDokumen74 halamanBaseband Pulse and Digital SignalingRicha SharmaBelum ada peringkat
- Term Paper PythonDokumen10 halamanTerm Paper PythonGagandeep KaurBelum ada peringkat
- Communications Systems: The Topics Within This Unit AreDokumen56 halamanCommunications Systems: The Topics Within This Unit AreGagandeep KaurBelum ada peringkat
- NewSyllabus 16420207601685Dokumen2 halamanNewSyllabus 16420207601685Gagandeep KaurBelum ada peringkat
- Lifetime Maximization For Amplify-and-Forward Cooperative NetworksDokumen6 halamanLifetime Maximization For Amplify-and-Forward Cooperative NetworksGagandeep KaurBelum ada peringkat
- Baseband Pulse and Digital SignalingDokumen74 halamanBaseband Pulse and Digital SignalingRicha SharmaBelum ada peringkat
- Iot NTCCDokumen12 halamanIot NTCCGagandeep KaurBelum ada peringkat
- Basics Of: Annexure CD - 01'Dokumen3 halamanBasics Of: Annexure CD - 01'Gagandeep KaurBelum ada peringkat
- Iot NTCCDokumen12 halamanIot NTCCGagandeep KaurBelum ada peringkat
- Power Allocation of Cooperative Amplify-And-Forward Communications With Multiple RelaysDokumen5 halamanPower Allocation of Cooperative Amplify-And-Forward Communications With Multiple RelaysGagandeep KaurBelum ada peringkat
- Opportunistic Energy Efficient Cooperative Communication: Osama Amin, Member, IEEE, and Lutz Lampe, Senior Member, IEEEDokumen4 halamanOpportunistic Energy Efficient Cooperative Communication: Osama Amin, Member, IEEE, and Lutz Lampe, Senior Member, IEEEGagandeep KaurBelum ada peringkat
- Sensors: Bit Error Rate Closed-Form Expressions For Lora Systems Under Nakagami and Rice Fading ChannelsDokumen11 halamanSensors: Bit Error Rate Closed-Form Expressions For Lora Systems Under Nakagami and Rice Fading ChannelsGagandeep KaurBelum ada peringkat
- Hariprasad 2020Dokumen9 halamanHariprasad 2020Gagandeep KaurBelum ada peringkat
- Joint Power Allocation and Relay Selection For Multiuser Cooperative CommunicationDokumen6 halamanJoint Power Allocation and Relay Selection For Multiuser Cooperative CommunicationGagandeep KaurBelum ada peringkat
- Cooperative Communication Protocol Designs Based On Optimum Power and Time AllocationDokumen14 halamanCooperative Communication Protocol Designs Based On Optimum Power and Time AllocationGagandeep KaurBelum ada peringkat
- Energy-Efficient Cooperative Communication Based On Power Control and Selective Single-Relay in Wireless Sensor NetworksDokumen13 halamanEnergy-Efficient Cooperative Communication Based On Power Control and Selective Single-Relay in Wireless Sensor NetworksGagandeep KaurBelum ada peringkat
- Cooperative Communication Protocol Designs Based On Optimum Power and Time AllocationDokumen14 halamanCooperative Communication Protocol Designs Based On Optimum Power and Time AllocationGagandeep KaurBelum ada peringkat
- Cooperative Relaying Improves LoRa Sensor ReliabilityDokumen5 halamanCooperative Relaying Improves LoRa Sensor ReliabilityGagandeep KaurBelum ada peringkat
- Lifetime Maximization For Amplify-and-Forward Cooperative NetworksDokumen6 halamanLifetime Maximization For Amplify-and-Forward Cooperative NetworksGagandeep KaurBelum ada peringkat
- Exploring Multi-Hop Lora For Green Smart Cities: Accepted From Open CallDokumen7 halamanExploring Multi-Hop Lora For Green Smart Cities: Accepted From Open CallGagandeep KaurBelum ada peringkat
- Matlab OptimizationDokumen9 halamanMatlab OptimizationGagandeep KaurBelum ada peringkat
- Wang-Nie2010 Article EnergyEfficiencyOptimizationOfDokumen8 halamanWang-Nie2010 Article EnergyEfficiencyOptimizationOfGagandeep KaurBelum ada peringkat
- Matlab OptimizationDokumen9 halamanMatlab OptimizationGagandeep KaurBelum ada peringkat
- End To End Latency Incurred in Cooperative Communication SystemDokumen5 halamanEnd To End Latency Incurred in Cooperative Communication SystemGagandeep KaurBelum ada peringkat
- DB CheatsheetDokumen2 halamanDB CheatsheetKaran RajBelum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- An70983 001-70983Dokumen24 halamanAn70983 001-70983अमरेश झाBelum ada peringkat
- List of Linkages2016Dokumen74 halamanList of Linkages2016engrwho0% (1)
- Atmel 42238 Uart Based Sam Ba Bootloader For Sam d20 AP Note At04189Dokumen12 halamanAtmel 42238 Uart Based Sam Ba Bootloader For Sam d20 AP Note At04189manasaBelum ada peringkat
- InductorsDokumen13 halamanInductorsManish AnandBelum ada peringkat
- Library Management System Project ReportDokumen50 halamanLibrary Management System Project ReportSURAJ GAMINGBelum ada peringkat
- Google Analytics Certification Test QuestionsDokumen36 halamanGoogle Analytics Certification Test QuestionsRoberto Delgato100% (1)
- Schedule of Rates 2011 Rev1Dokumen144 halamanSchedule of Rates 2011 Rev1Screen BiruBelum ada peringkat
- Enclosed Product Catalogue 2012Dokumen24 halamanEnclosed Product Catalogue 2012Jon BerryBelum ada peringkat
- Surface Vortices and Pressures in Suction Intakes of Vertical Axial-Flow PumpsDokumen22 halamanSurface Vortices and Pressures in Suction Intakes of Vertical Axial-Flow PumpssauroBelum ada peringkat
- Programmability in SPSS 16 & 17, Jon PeckDokumen36 halamanProgrammability in SPSS 16 & 17, Jon PeckJasmin MaricBelum ada peringkat
- Brief Summary of The Original COCOMO ModelDokumen5 halamanBrief Summary of The Original COCOMO ModelTirthajit SinhaBelum ada peringkat
- RefrigerationDokumen11 halamanRefrigerationBroAmirBelum ada peringkat
- Royal 3KW Solar System: Ref: RSE/SQ/804/2020 Date: 09-28-2020 Sale QuotationDokumen3 halamanRoyal 3KW Solar System: Ref: RSE/SQ/804/2020 Date: 09-28-2020 Sale Quotationmuhammad aliBelum ada peringkat
- Amptec Issue 7Dokumen8 halamanAmptec Issue 7Linda Turner-BoothBelum ada peringkat
- CAT775GDokumen32 halamanCAT775GAndy Chan100% (1)
- A134 PDFDokumen4 halamanA134 PDFJarbas MoraesBelum ada peringkat
- Auto Temp II Heat Pump: Programmable Thermostat For Single and Multistage Heat Pump SystemsDokumen22 halamanAuto Temp II Heat Pump: Programmable Thermostat For Single and Multistage Heat Pump Systemswideband76Belum ada peringkat
- Geo-Informatics and Nano-Technology For Precision FARMING (AGRO-301) 5 SemesterDokumen5 halamanGeo-Informatics and Nano-Technology For Precision FARMING (AGRO-301) 5 SemesterVinod Vincy67% (3)
- Environmentally-Friendly LPG Forklift Trucks with Superior Power & PerformanceDokumen5 halamanEnvironmentally-Friendly LPG Forklift Trucks with Superior Power & PerformanceCarlos Miguel Apipilhuasco GonzálezBelum ada peringkat
- Saudi Arabia Power StationDokumen108 halamanSaudi Arabia Power StationEhab HarbBelum ada peringkat
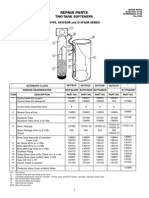
- Star S07FS32DR Water Softener Repair PartsDokumen1 halamanStar S07FS32DR Water Softener Repair PartsBillBelum ada peringkat
- XHB CommFuncDokumen10 halamanXHB CommFuncPalatBelum ada peringkat
- SI Units in Geotechnical EngineeringDokumen7 halamanSI Units in Geotechnical EngineeringfaroeldrBelum ada peringkat
- Man Power PlanningDokumen5 halamanMan Power PlanningKarthik AchinBelum ada peringkat
- Computer Science: FieldsDokumen2 halamanComputer Science: FieldstdoraxBelum ada peringkat
- MGS3750 28FDokumen4 halamanMGS3750 28FAndi Z Pasuloi PatongaiBelum ada peringkat
- CCTV Camera Hack With Google Dork ListDokumen3 halamanCCTV Camera Hack With Google Dork ListsarahdianewhalenBelum ada peringkat
- KernelDokumen326 halamanKernelSkyezine Via Kit FoxBelum ada peringkat
- Industrial HygieneDokumen31 halamanIndustrial HygieneGautam SharmaBelum ada peringkat
- Model Railroad Plans and DrawingsDokumen7 halamanModel Railroad Plans and DrawingsBán ZoltánBelum ada peringkat