Anda mungkin juga menyukai
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- LGU Guidebook For Local Housing ProgramDokumen89 halamanLGU Guidebook For Local Housing ProgramAura Garcia-Gabriel100% (1)
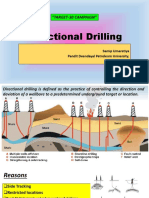
- Directional DrillingDokumen29 halamanDirectional DrillingAkashShuklaBelum ada peringkat
- Surveying 1 Lecture NotesDokumen49 halamanSurveying 1 Lecture NotesSivanesh SK86% (42)
- Topographic Map of New WaverlyDokumen1 halamanTopographic Map of New WaverlyHistoricalMapsBelum ada peringkat
- FMB Technical Bulletin Number 11Dokumen2 halamanFMB Technical Bulletin Number 11Diane De lunaBelum ada peringkat
- Engineering Surveys Module 01Dokumen10 halamanEngineering Surveys Module 01TACLAOAN, Kristian T.Belum ada peringkat
- 01 Total-Station GPS-1 PDFDokumen113 halaman01 Total-Station GPS-1 PDFAdam senoBelum ada peringkat
- Module 5. Taping-Measurement of Horizontal DistanceDokumen5 halamanModule 5. Taping-Measurement of Horizontal DistanceJovin BallesterosBelum ada peringkat
- Antenna Survey 2011 VF MidDokumen11 halamanAntenna Survey 2011 VF MidSophie5Belum ada peringkat
- Ceornt120 History of Ce in The PhilippinesDokumen12 halamanCeornt120 History of Ce in The PhilippinesZowa ZowBelum ada peringkat
- Land SurveyingDokumen174 halamanLand SurveyingalejoelingBelum ada peringkat
- Lab Report v2 New EditedDokumen12 halamanLab Report v2 New EditedMuhammad khairinBelum ada peringkat
- ANALYSIS OF FORCES AND STABILITYCHECKS OF GRAVITY DAMS ProjectDokumen33 halamanANALYSIS OF FORCES AND STABILITYCHECKS OF GRAVITY DAMS ProjectKai Pascal AlibassaBelum ada peringkat
- 08 2007 EstoniaDokumen2 halaman08 2007 EstoniaENAK9000Belum ada peringkat
- Horizon Power Underground Cable Installation Manual 010619Dokumen49 halamanHorizon Power Underground Cable Installation Manual 010619fonseca_af3Belum ada peringkat
- Agam05c 07Dokumen59 halamanAgam05c 07Marko VrkljanBelum ada peringkat
- Skylight ComparisonDokumen362 halamanSkylight ComparisonmarklesterBelum ada peringkat
- Direction Well Trajectory DesignDokumen10 halamanDirection Well Trajectory Designlaxmikant1983Belum ada peringkat
- Site Location Map Reading Lot PlottingDokumen30 halamanSite Location Map Reading Lot PlottingRamil BillonesBelum ada peringkat
- Terms of RefrenceDokumen3 halamanTerms of RefrenceSantosh BasnetBelum ada peringkat
- Kec TheoryDokumen7 halamanKec TheorybaizubirajiBelum ada peringkat
- Topographic Map of Bevil OaksDokumen1 halamanTopographic Map of Bevil OaksHistoricalMapsBelum ada peringkat
- ABS RulesDokumen172 halamanABS RulesKrionikaBelum ada peringkat
- Requirements For Topographical Surveys-WebDokumen16 halamanRequirements For Topographical Surveys-WebDunstan SendiwalaBelum ada peringkat
- Example 2 - Survey Map ReportDokumen3 halamanExample 2 - Survey Map ReportKiprop SimionBelum ada peringkat
- Soil and Water Conservation Engineering1 PDFDokumen118 halamanSoil and Water Conservation Engineering1 PDFIsmail Naufal AzkiaBelum ada peringkat
- (1907) Manual of Land SurveyingDokumen580 halaman(1907) Manual of Land SurveyingHerbert Hillary Booker 2nd100% (1)
- Building Engineering: SurveyingDokumen32 halamanBuilding Engineering: SurveyingPatrick MachariaBelum ada peringkat
- FE 208 Lab #4 - Profile Leveling: CrewDokumen4 halamanFE 208 Lab #4 - Profile Leveling: CrewJefferson Himson0% (1)
- 2012 HCO Oriented Core ProceduresDokumen30 halaman2012 HCO Oriented Core ProceduresPancho Perez100% (1)