Anda mungkin juga menyukai
- Lista Formulas de RecorrênciaDokumen1 halamanLista Formulas de RecorrênciaArnaldo AraújoBelum ada peringkat
- Apresentação Sistemas de Informações Cap 1-Administração Da Empresa DigitalDokumen46 halamanApresentação Sistemas de Informações Cap 1-Administração Da Empresa DigitalArnaldo AraújoBelum ada peringkat
- Paper 03Dokumen2 halamanPaper 03edjtcBelum ada peringkat
- Aula Cinematica de RotaçãoDokumen12 halamanAula Cinematica de RotaçãoArnaldo Araújo100% (1)
- Redes 2 - Redes de Sensores-Gerenciamento de RedesDokumen18 halamanRedes 2 - Redes de Sensores-Gerenciamento de RedesArnaldo Araújo100% (1)
- Programação Linear - Manual LINDODokumen9 halamanProgramação Linear - Manual LINDOArnaldo Araújo100% (2)
- Intel. Artificial - Agente Resolução de ProblemasDokumen31 halamanIntel. Artificial - Agente Resolução de ProblemasArnaldo AraújoBelum ada peringkat
- Apresentação Sistemas de Informações - Cap 8 Telecomunicações e RedesDokumen39 halamanApresentação Sistemas de Informações - Cap 8 Telecomunicações e RedesArnaldo AraújoBelum ada peringkat
- Modelo Baseado em Lógica Fuzzy para o Diagnóstico de Doenças - EnfermagemDokumen5 halamanModelo Baseado em Lógica Fuzzy para o Diagnóstico de Doenças - EnfermagemArnaldo Araújo100% (1)
- Aplicação Pesquisa Operacional-Produção Da CachaçaDokumen7 halamanAplicação Pesquisa Operacional-Produção Da CachaçaArnaldo AraújoBelum ada peringkat
- Aplicação Multi-Nível Baseada Na Caracterização de Tráfego em Uma Rede Sem Fio em Larga EscalaDokumen15 halamanAplicação Multi-Nível Baseada Na Caracterização de Tráfego em Uma Rede Sem Fio em Larga EscalaArnaldo AraújoBelum ada peringkat
- Programação Linear InteiraDokumen62 halamanProgramação Linear InteiraArnaldo Araújo100% (4)
- Analise de Sensibilidade LINDODokumen5 halamanAnalise de Sensibilidade LINDOArnaldo Araújo100% (1)
- Lista de Exercicios de Pesquisa Operacional Com RespostasDokumen14 halamanLista de Exercicios de Pesquisa Operacional Com RespostasArnaldo Araújo87% (119)
- Estrutura de Dados II - Arvores B - (BTREE)Dokumen4 halamanEstrutura de Dados II - Arvores B - (BTREE)Arnaldo AraújoBelum ada peringkat
- Tutorial Cadeias de MarkovDokumen8 halamanTutorial Cadeias de MarkovArnaldo AraújoBelum ada peringkat
- Tutorial Complexidade de AlgoritmosDokumen24 halamanTutorial Complexidade de AlgoritmosArnaldo AraújoBelum ada peringkat
- Sistemas Lineares - Métodos IterativosDokumen33 halamanSistemas Lineares - Métodos IterativosArnaldo AraújoBelum ada peringkat
- Relatório Técnico TinyosDokumen19 halamanRelatório Técnico TinyosArnaldo AraújoBelum ada peringkat
- NP-Completude de AlgoritmosDokumen23 halamanNP-Completude de AlgoritmosArnaldo Araújo100% (1)
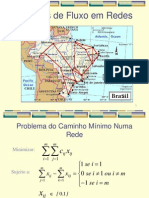
- Aplicação PO-Fluxo em RedesDokumen26 halamanAplicação PO-Fluxo em RedesArnaldo AraújoBelum ada peringkat
- Tutorial Cadeias de MarkovDokumen8 halamanTutorial Cadeias de MarkovArnaldo AraújoBelum ada peringkat
- Metodo de Otimizacão SimplexDokumen12 halamanMetodo de Otimizacão SimplexVinicius SilvaBelum ada peringkat
- OracleDokumen50 halamanOracleedjtcBelum ada peringkat
- Método CholeskyDokumen5 halamanMétodo CholeskyArnaldo AraújoBelum ada peringkat
- Tutorial Gerenciamento de Memória em JavaDokumen96 halamanTutorial Gerenciamento de Memória em JavaArnaldo AraújoBelum ada peringkat
- Guia LMPT LinuxDokumen24 halamanGuia LMPT LinuxEduardo Berbet de AlcantaraBelum ada peringkat
- Estrutura de Dados - Tabelas de DispersãoDokumen15 halamanEstrutura de Dados - Tabelas de DispersãoArnaldo AraújoBelum ada peringkat
- Estimação de Intervalos de ConfiançaDokumen21 halamanEstimação de Intervalos de ConfiançaArnaldo AraújoBelum ada peringkat
- Uma Licao de Vida Meir SchneiderDokumen162 halamanUma Licao de Vida Meir SchneiderOswaldo Ayres SanchiniBelum ada peringkat
- Análise das mensagens ocultas nos clássicos da Disney Cinderela, Hércules e A Bela e a FeraDokumen9 halamanAnálise das mensagens ocultas nos clássicos da Disney Cinderela, Hércules e A Bela e a FeraEder MendesBelum ada peringkat
- A Importância Dos Lubrificantes Automóveis - ROCHA PNEUS - 1621833714923Dokumen5 halamanA Importância Dos Lubrificantes Automóveis - ROCHA PNEUS - 1621833714923JULIOBelum ada peringkat
- Hoodoo FeitiçosDokumen45 halamanHoodoo FeitiçosEduardo Hortenciano83% (12)
- FundamentosDokumen2 halamanFundamentosCleo CoelhoBelum ada peringkat
- A Estrutura de Tomada de Decisão de Política Externa em Moçambique - O Papel Da Opinião PúblicaDokumen63 halamanA Estrutura de Tomada de Decisão de Política Externa em Moçambique - O Papel Da Opinião PúblicaAlves Manjate100% (2)
- Circuito SG3525 conversor CC-CCDokumen7 halamanCircuito SG3525 conversor CC-CCNikolas Augusto100% (1)
- Estudo de Caso - Gestão de EstoquesDokumen38 halamanEstudo de Caso - Gestão de EstoquesRony PetersonBelum ada peringkat
- Gestão do Tempo: Autoavaliação em 40 QuestõesDokumen5 halamanGestão do Tempo: Autoavaliação em 40 QuestõesAndrea CoelhoBelum ada peringkat
- Estudo Dirigido (A1) - Saneamento. GABARITODokumen2 halamanEstudo Dirigido (A1) - Saneamento. GABARITOandersonBelum ada peringkat
- RESOLUÇÃO 996Dokumen6 halamanRESOLUÇÃO 996ritielesimeoliBelum ada peringkat
- DESCRITOR 3 - SimuladoDokumen3 halamanDESCRITOR 3 - SimuladoIsabel RothBelum ada peringkat
- O Menino Selvagem e o processo de socializaçãoDokumen3 halamanO Menino Selvagem e o processo de socializaçãoJose Pereira(12LHCSE)Belum ada peringkat
- AULA 10 Sem Centros Introducao PDFDokumen23 halamanAULA 10 Sem Centros Introducao PDFMarcos SídneyBelum ada peringkat
- Teoria Da Personalidade e Do ComportamentoDokumen37 halamanTeoria Da Personalidade e Do ComportamentoElisângela de AlbuquerqueBelum ada peringkat
- Guia para iniciantes no Muay ThaiDokumen18 halamanGuia para iniciantes no Muay ThaiDoutor NordsonBelum ada peringkat
- Agro Foester Produtos Agricolas e Veterinários LTDA - PGRDokumen25 halamanAgro Foester Produtos Agricolas e Veterinários LTDA - PGRAmarildo paixaoBelum ada peringkat
- Ventilador pulmonar VLP 6000 para emergênciasDokumen1 halamanVentilador pulmonar VLP 6000 para emergênciasailson.marins sl98104120Belum ada peringkat
- Projeto Penha Papeis GLPDokumen1 halamanProjeto Penha Papeis GLPJadson QueiroBelum ada peringkat
- Teoria Dos SistemasDokumen4 halamanTeoria Dos SistemaspghopoBelum ada peringkat
- Programa de Gerenciamento de Riscos: Álvaro Dos Santos Arruda - Engenheiro de Segurança Do TrabalhoDokumen41 halamanPrograma de Gerenciamento de Riscos: Álvaro Dos Santos Arruda - Engenheiro de Segurança Do TrabalhoAlvaro S. Arruda100% (4)
- Sobonfu Some o Espirito Da Intimidade LegívelDokumen141 halamanSobonfu Some o Espirito Da Intimidade LegívelLuisa ArmazémBelum ada peringkat
- 1 Estudo Dirigido HDIDokumen8 halaman1 Estudo Dirigido HDIJullyana BorbaBelum ada peringkat
- Medidas GoreanasDokumen36 halamanMedidas GoreanasPetrov YatsenkoBelum ada peringkat
- FP Ed 279 261123 Digital InterativaDokumen36 halamanFP Ed 279 261123 Digital InterativaFabio Fidelis BilcheBelum ada peringkat
- 580M RetroescavadeiraDokumen6 halaman580M RetroescavadeiraJerônimo RafaelBelum ada peringkat
- TP1 - Hidrologia e Hidraulica ComputacionalDokumen24 halamanTP1 - Hidrologia e Hidraulica ComputacionalThais SallesBelum ada peringkat
- Medindo Vibração GuiaDokumen46 halamanMedindo Vibração GuiaFelipe PimentaBelum ada peringkat
- Laudo Talha ARTDokumen3 halamanLaudo Talha ARTAnonymous zhGvQ867% (3)
- 3º Ano - AngiospermasDokumen52 halaman3º Ano - AngiospermasJhonBelum ada peringkat