Anda mungkin juga menyukai
- Eim377 Ad9850 Signal Generator Module v01Dokumen10 halamanEim377 Ad9850 Signal Generator Module v01Frederico Ribeiro BarnabéBelum ada peringkat
- Analog Inputs and Outputs: Voltage LogicalDokumen29 halamanAnalog Inputs and Outputs: Voltage LogicalmdkhandaveBelum ada peringkat
- Experiment 4, Part 1Dokumen7 halamanExperiment 4, Part 1ollata kalanoBelum ada peringkat
- Experiment 1 Op-Amps and Basics of Signal ConditioningDokumen6 halamanExperiment 1 Op-Amps and Basics of Signal ConditioningAnonymous XZUyueNBelum ada peringkat
- ADIC ExperimentsDokumen41 halamanADIC ExperimentsTushar PatilBelum ada peringkat
- Function Generator Op-Amp Summing Circuits Pulse Width Modulation LM311 ComparatorDokumen7 halamanFunction Generator Op-Amp Summing Circuits Pulse Width Modulation LM311 ComparatorMuhammad JunaidBelum ada peringkat
- Mbed BK Ed2 CH 4Dokumen20 halamanMbed BK Ed2 CH 4NecBelum ada peringkat
- U (T) W (T) Z (T) y (T) : VCCS Input ParametersDokumen14 halamanU (T) W (T) Z (T) y (T) : VCCS Input ParametersQaiser JavedBelum ada peringkat
- Voltage Controlled Current SourceDokumen14 halamanVoltage Controlled Current SourceQaiser JavedBelum ada peringkat
- Chapter-3 Ec II Op AmpDokumen27 halamanChapter-3 Ec II Op AmpmhdfnBelum ada peringkat
- CMOS Inverter Dynamic CharacteristicsDokumen5 halamanCMOS Inverter Dynamic Characteristicsroxy8marie8chan100% (1)
- HC SR08 3Dokumen10 halamanHC SR08 3Juan PerezBelum ada peringkat
- Op AmpsDokumen22 halamanOp AmpsKrishnaveni DhulipalaBelum ada peringkat
- LT SpiceDokumen6 halamanLT SpiceVijay Preetham100% (1)
- Basic Building Blocks of Embedded System: Microcontroller: CPU, I/Os, Memory, Interrupts, Timers, CommunicationsDokumen23 halamanBasic Building Blocks of Embedded System: Microcontroller: CPU, I/Os, Memory, Interrupts, Timers, CommunicationsRagini GuptaBelum ada peringkat
- Module - 08 F2833x Analogue Digital ConverterDokumen28 halamanModule - 08 F2833x Analogue Digital ConverterMaria MEKLIBelum ada peringkat
- MN Comp6e 03Dokumen19 halamanMN Comp6e 03baksof3843Belum ada peringkat
- DC 2317 AfaDokumen10 halamanDC 2317 AfavictorhugoseBelum ada peringkat
- Lab Experiment - Introduction To Switch Mode Power SupplyDokumen9 halamanLab Experiment - Introduction To Switch Mode Power SupplyChris ManahanBelum ada peringkat
- Elec/Tele/Phtn 4123 Electrical/Telecommunications Design Proficiency Lab2Dokumen11 halamanElec/Tele/Phtn 4123 Electrical/Telecommunications Design Proficiency Lab2Joseph NguyenBelum ada peringkat
- Boost AverageDokumen2 halamanBoost AverageLực Lê TấnBelum ada peringkat
- Mbed CH 4 v1Dokumen15 halamanMbed CH 4 v1Brian YehBelum ada peringkat
- Operational Amplifier-IVDokumen40 halamanOperational Amplifier-IVBhalchandra ChandakkarBelum ada peringkat
- Heating Failure Detection PDFDokumen3 halamanHeating Failure Detection PDFHugh MantaBelum ada peringkat
- Tutorial Ultracapacitor Model 1Dokumen8 halamanTutorial Ultracapacitor Model 1VinardoPriyadiRahmanBelum ada peringkat
- ECE 250 Lab 6 Temperature Sensor Subsystem Design: VI.A. Pre-Lab Design and System OperationDokumen7 halamanECE 250 Lab 6 Temperature Sensor Subsystem Design: VI.A. Pre-Lab Design and System OperationHerless FloresBelum ada peringkat
- Introduction To Practical Exercises Using MODICOM 2 ... - LJ Create PDFDokumen8 halamanIntroduction To Practical Exercises Using MODICOM 2 ... - LJ Create PDFAnonymous FKMfvCbBelum ada peringkat
- Operational Amplifiers I: Experiment 11Dokumen4 halamanOperational Amplifiers I: Experiment 11asmonovBelum ada peringkat
- 7.BJT 7 SupplimenteryDokumen9 halaman7.BJT 7 SupplimenteryshilaBelum ada peringkat
- Octave1 StartDokumen5 halamanOctave1 Startsorin0920047329Belum ada peringkat
- 8d-14d PFC Controller Manual PDFDokumen29 halaman8d-14d PFC Controller Manual PDFSergio100% (1)
- Boost Converter and Buck ConverterDokumen11 halamanBoost Converter and Buck Converterf789sgacanonBelum ada peringkat
- EE 4343 Lab#1 Identification of Motor Transfer Function: N R K K K K ADokumen6 halamanEE 4343 Lab#1 Identification of Motor Transfer Function: N R K K K K ASaeed Ahmed BajwaBelum ada peringkat
- Anna University Lab Manuals For Engineering Students - HALF WAVE RECTIFIERDokumen13 halamanAnna University Lab Manuals For Engineering Students - HALF WAVE RECTIFIERDayanand Gowda KrBelum ada peringkat
- Function GeneratorDokumen13 halamanFunction GeneratorDilJalaayBelum ada peringkat
- W27E257 Eprom PDFDokumen15 halamanW27E257 Eprom PDFAvi Ramirez CervantesBelum ada peringkat
- Spice Ii: Prepared by Dr. Wagih GirgisDokumen30 halamanSpice Ii: Prepared by Dr. Wagih GirgisMostafa MohamedBelum ada peringkat
- Discontinuous Flyback Transformer Description and Design ParametersDokumen6 halamanDiscontinuous Flyback Transformer Description and Design Parametersren__1986Belum ada peringkat
- Understanding Output Voltage Limitations of DC/DC Buck ConvertersDokumen4 halamanUnderstanding Output Voltage Limitations of DC/DC Buck ConvertersLatif KurniaBelum ada peringkat
- RealLAB2 ManualDokumen5 halamanRealLAB2 ManualDiscord GrindBelum ada peringkat
- Updated Simlab ManualDokumen46 halamanUpdated Simlab ManualSumanthBelum ada peringkat
- ELEC30x0 Lab8Dokumen6 halamanELEC30x0 Lab8Lûtwàmä JôëBelum ada peringkat
- Analog Devices - LVDT Signal Conditioner AD598Dokumen16 halamanAnalog Devices - LVDT Signal Conditioner AD598maguschBelum ada peringkat
- EEE 4308L Electronics I Laboratory Laboratory #1 Operational Amplifier-Based IntegratorsDokumen19 halamanEEE 4308L Electronics I Laboratory Laboratory #1 Operational Amplifier-Based IntegratorsnoneBelum ada peringkat
- Hardware-in-the-Loop Testing For Power Electronics Control DesignDokumen9 halamanHardware-in-the-Loop Testing For Power Electronics Control DesignPawin lothongBelum ada peringkat
- What Is The Advantages and Disadvantages of Analog and Digital InstrumentDokumen22 halamanWhat Is The Advantages and Disadvantages of Analog and Digital Instrumentabishek_bhardwa866645% (20)
- Sistec: Sagar Group of InstitutionsDokumen28 halamanSistec: Sagar Group of InstitutionsdeeptimalviyaBelum ada peringkat
- EEPROMDokumen16 halamanEEPROMTutankhalmoxeBelum ada peringkat
- Cadence - Virtuoso: Amity UniversityDokumen27 halamanCadence - Virtuoso: Amity UniversityAkhil Aggarwal100% (1)
- BCU TR - 6MD85.rv1Dokumen5 halamanBCU TR - 6MD85.rv1PằngPằngChiuChiuBelum ada peringkat
- Comparator CircuitDokumen6 halamanComparator CircuitMagesh KumarBelum ada peringkat
- AB-30 V-I and I-V Converter: An ISO 9001: 2000 CompanyDokumen23 halamanAB-30 V-I and I-V Converter: An ISO 9001: 2000 CompanyWandi WandaniBelum ada peringkat
- Lectures 16 To 18 - Op-AmpDokumen19 halamanLectures 16 To 18 - Op-AmpAniketsingh MundlothBelum ada peringkat
- Clock GeneratorDokumen11 halamanClock GeneratorswathipushpaBelum ada peringkat
- Lab 6Dokumen7 halamanLab 6Koteswara Rao VaddempudiBelum ada peringkat
- XR 2206 AM ModulatorDokumen4 halamanXR 2206 AM ModulatorMuhammad UmairBelum ada peringkat
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Dari EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Belum ada peringkat
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Dari EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Penilaian: 2.5 dari 5 bintang2.5/5 (3)
- "Firewall": A Written Report in Network ManagementDokumen16 halaman"Firewall": A Written Report in Network ManagementLeah Ann DiazBelum ada peringkat
- iDS-7200HQHI-M2/S SERIES Turbo Acusense DVR: Key FeatureDokumen4 halamaniDS-7200HQHI-M2/S SERIES Turbo Acusense DVR: Key Featuresony_w200Belum ada peringkat
- 2008-N-BP-SP - Deploying SharePoint Server 2013 Using Dell EqualLogic PS Series ISCSI SANDokumen68 halaman2008-N-BP-SP - Deploying SharePoint Server 2013 Using Dell EqualLogic PS Series ISCSI SANbalamurali_aBelum ada peringkat
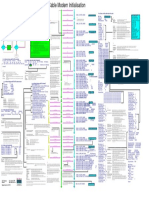
- Cisco CM - Initialization-Pdf-Wallchart PDFDokumen1 halamanCisco CM - Initialization-Pdf-Wallchart PDFjjmazueraBelum ada peringkat
- CII3D4 SisTerPar 07 Indirect CommunicationDokumen32 halamanCII3D4 SisTerPar 07 Indirect CommunicationMUHAMMAD ABU RIJAL KUSNAEDIBelum ada peringkat
- Parallel Wireless Urban Rural DeploymentsDokumen18 halamanParallel Wireless Urban Rural DeploymentsSamudera BuanaBelum ada peringkat
- Case Study of Load Balancing and Relay Coordination of 132KV Transmission GridDokumen6 halamanCase Study of Load Balancing and Relay Coordination of 132KV Transmission GridsivaBelum ada peringkat
- RP 141817Dokumen8 halamanRP 141817evolvingsatBelum ada peringkat
- LG AN-WL100 User Manual - EnglishDokumen27 halamanLG AN-WL100 User Manual - EnglishRon van KleeffBelum ada peringkat
- Puertos para Habilitar para MilestoneDokumen8 halamanPuertos para Habilitar para MilestonejcmarchettiBelum ada peringkat
- Inventory 22 June 2017 1Dokumen16 halamanInventory 22 June 2017 1BysBelum ada peringkat
- E3D 2.1 Model Introduction-Rev0Dokumen58 halamanE3D 2.1 Model Introduction-Rev0Sachin Shinde50% (2)
- Win 7 COOKBOOKDokumen13 halamanWin 7 COOKBOOKSushat KoradaBelum ada peringkat
- International Research Journal of Engineering and Technology (IRJET)Dokumen8 halamanInternational Research Journal of Engineering and Technology (IRJET)Harikrishnan ShunmugamBelum ada peringkat
- XPAIB006EN K InstrSW Lyza 5000 WebDokumen20 halamanXPAIB006EN K InstrSW Lyza 5000 Webdixisa9055 kkoup.comBelum ada peringkat
- Air Wave ReleasenotesDokumen20 halamanAir Wave ReleasenotesajaipaulBelum ada peringkat
- 66 1001 002-7 Quick Guide RFID Encoder and UpdaterDokumen9 halaman66 1001 002-7 Quick Guide RFID Encoder and UpdaterDark devilBelum ada peringkat
- ICT Grade 11-ExamDokumen10 halamanICT Grade 11-ExamEndash HaileBelum ada peringkat
- 4.7.1 Packet Tracer - Connect The Physical LayerDokumen4 halaman4.7.1 Packet Tracer - Connect The Physical Layerkds20850Belum ada peringkat
- Ladalla Srujan 19111979Dokumen3 halamanLadalla Srujan 19111979srujan5316Belum ada peringkat
- BlueStick EDokumen10 halamanBlueStick ERaúl OpazoBelum ada peringkat
- Somaliland Fibre Optic & Berbera GatewayDokumen6 halamanSomaliland Fibre Optic & Berbera GatewayDuale FuuraaBelum ada peringkat
- Abstract:: DisadvantagesDokumen4 halamanAbstract:: Disadvantagesprabhujaya97893Belum ada peringkat
- Web SocketDokumen20 halamanWeb SocketakahBelum ada peringkat
- User Manual: Element T6 Max Bluetooth SpeakerDokumen51 halamanUser Manual: Element T6 Max Bluetooth SpeakerAung Thu LinnBelum ada peringkat
- SMF Admin Cheat Sheet 1714285Dokumen3 halamanSMF Admin Cheat Sheet 1714285TRACKERSOFTBelum ada peringkat
- Simatic: STEP 7 V5.5 Programming Software For SIMATIC S7 / M7 / C7Dokumen36 halamanSimatic: STEP 7 V5.5 Programming Software For SIMATIC S7 / M7 / C7Hoàng HảiBelum ada peringkat
- 5.5 A Quadrature Relaxation Oscillator With A Process-Induced Frequency-Error Compensation LoopDokumen3 halaman5.5 A Quadrature Relaxation Oscillator With A Process-Induced Frequency-Error Compensation Loopeng_abdelghany1979Belum ada peringkat
- Use of Internet and Electronic Communication SystemDokumen7 halamanUse of Internet and Electronic Communication Systempraveenrock1118Belum ada peringkat
- Data Sheet 6GK5004-1BF00-1AB2: Product Type Designation Scalance Xb004-1LdDokumen3 halamanData Sheet 6GK5004-1BF00-1AB2: Product Type Designation Scalance Xb004-1LdAbdul ZahinBelum ada peringkat