Anda mungkin juga menyukai
- Basic Operation Principles and ElectricaDokumen9 halamanBasic Operation Principles and ElectricaTarak BENSLIMANEBelum ada peringkat
- Polinder Epejournal 05Dokumen9 halamanPolinder Epejournal 05Ibrahim HasanBelum ada peringkat
- Wind EnergyDokumen8 halamanWind EnergyValenitnBelum ada peringkat
- Fundamentals of Wind EnergyDokumen12 halamanFundamentals of Wind EnergyMas3odBelum ada peringkat
- 5 Modeling and Control of Variable Speed Wind Turbine Drive System DynamicsDokumen11 halaman5 Modeling and Control of Variable Speed Wind Turbine Drive System DynamicsnguyenngocbanBelum ada peringkat
- Continuous Variable Speed Wind Turbine: Transmission Concept and Robust ControlDokumen17 halamanContinuous Variable Speed Wind Turbine: Transmission Concept and Robust ControlDork654651Belum ada peringkat
- (Ajay Singh) Review On Control Techniques For VSWT NewDokumen6 halaman(Ajay Singh) Review On Control Techniques For VSWT NewAjay SinghBelum ada peringkat
- A Study of MPPT Schemes in PMSG Based Wind Turbine System: Joydeep Sarkar Prof. Shridhar S KhuleDokumen6 halamanA Study of MPPT Schemes in PMSG Based Wind Turbine System: Joydeep Sarkar Prof. Shridhar S KhuleKhiem NguyenBelum ada peringkat
- Hybrid Wind Diesel Energy System Using Matlab Simulation: ISO 9001:2008 CertifiedDokumen9 halamanHybrid Wind Diesel Energy System Using Matlab Simulation: ISO 9001:2008 Certifiedsatya_vanapalli3422Belum ada peringkat
- Power and Energy Analysis of Commercial Small Wind Turbine SystemsDokumen6 halamanPower and Energy Analysis of Commercial Small Wind Turbine SystemsKamal DrawilBelum ada peringkat
- Dynamic Modeling of Wind Power Generation: H Ector A. Pulgar-Painemal and Peter W. SauerDokumen6 halamanDynamic Modeling of Wind Power Generation: H Ector A. Pulgar-Painemal and Peter W. SauerkfaliBelum ada peringkat
- Pitch Angle Control For Variable Speed Wind TurbinesDokumen6 halamanPitch Angle Control For Variable Speed Wind TurbinesNandan ModaniBelum ada peringkat
- 1 s2.0 S0960148110004088 Main PDFDokumen6 halaman1 s2.0 S0960148110004088 Main PDFAmmarNikBelum ada peringkat
- Book Chapter SenroySirDokumen29 halamanBook Chapter SenroySirHafsah MushtaqBelum ada peringkat
- Lecture 4 On Wind SystemDokumen57 halamanLecture 4 On Wind SystemNaman NepalBelum ada peringkat
- Tip-Speed Ratio - WikipediaDokumen9 halamanTip-Speed Ratio - WikipediaKailash ChohanBelum ada peringkat
- RDokumen8 halamanRhamza gaBelum ada peringkat
- Swes Unit 3Dokumen64 halamanSwes Unit 3pradeepBelum ada peringkat
- Wind Power FundamentalsDokumen41 halamanWind Power FundamentalsHmaedBelum ada peringkat
- A New Method of Maximum Power Point Tracking For DFIG Based Wind TurbineDokumen7 halamanA New Method of Maximum Power Point Tracking For DFIG Based Wind Turbinebalaji06202Belum ada peringkat
- Wind Turbine Emulator Laboratory SetupDokumen5 halamanWind Turbine Emulator Laboratory Setupbalaji mendiBelum ada peringkat
- Group 20 EEE 2K16Dokumen37 halamanGroup 20 EEE 2K16MIGHTY RAJUBelum ada peringkat
- Primary Frequency Control by Wind Turbines: I. Erlich, Senior Member, IEEE and M. Wilch, Student Member, IEEEDokumen8 halamanPrimary Frequency Control by Wind Turbines: I. Erlich, Senior Member, IEEE and M. Wilch, Student Member, IEEEМилан ЛукићBelum ada peringkat
- APPLICATION OF MATRIX CONVERTER IN WIND PMSGDokumen8 halamanAPPLICATION OF MATRIX CONVERTER IN WIND PMSGChetan GhatageBelum ada peringkat
- AIAA2013 ElQatary ElhadidiDokumen12 halamanAIAA2013 ElQatary ElhadidiNour3' 'Belum ada peringkat
- One-point control for variable speed wind turbinesDokumen10 halamanOne-point control for variable speed wind turbinesHuibin ZhangBelum ada peringkat
- Overview of Wind Energy TechDokumen7 halamanOverview of Wind Energy TechDeborah CrominskiBelum ada peringkat
- Renewable Energy: J. Kjellin, F. Bülow, S. Eriksson, P. Deglaire, M. Leijon, H. BernhoffDokumen4 halamanRenewable Energy: J. Kjellin, F. Bülow, S. Eriksson, P. Deglaire, M. Leijon, H. Bernhoffhassan zohairBelum ada peringkat
- Simulation of Directly Grid-Connected Wind Turbines For Voltage Fluctuation EvaluationDokumen16 halamanSimulation of Directly Grid-Connected Wind Turbines For Voltage Fluctuation EvaluationGiovanni BoscoloBelum ada peringkat
- Apuc 06Dokumen13 halamanApuc 06Zigwai BosanBelum ada peringkat
- Modeling and simulation of a variable speed wind turbine in MATLAB/SimulinkDokumen2 halamanModeling and simulation of a variable speed wind turbine in MATLAB/SimulinkSean Lloyd De LeonBelum ada peringkat
- 1.1 Problem BackgroundDokumen29 halaman1.1 Problem BackgroundSabari RajanBelum ada peringkat
- Maximum Power Point Tracking of Variable Speed Wind Energy Conversion SystemDokumen9 halamanMaximum Power Point Tracking of Variable Speed Wind Energy Conversion SystemJoniBelum ada peringkat
- Conf 1Dokumen5 halamanConf 1sujithadharani9813Belum ada peringkat
- Bog HoseDokumen29 halamanBog HoseNadia BnBelum ada peringkat
- 3 Year Mechanical Power MPE 331: Dr. Mohamed Hammam 2019Dokumen19 halaman3 Year Mechanical Power MPE 331: Dr. Mohamed Hammam 2019Mohamed HammamBelum ada peringkat
- Introduction To Wind Energy SystemsDokumen17 halamanIntroduction To Wind Energy SystemsCarlos MuñozBelum ada peringkat
- Chapter 10 SummaryDokumen17 halamanChapter 10 SummaryKaouachi Ahmed LouayBelum ada peringkat
- Application of A Matrix Converter For The Power Control of A Variable-Speed Wind-Turbine Driving A Doubly-Fed Induction GeneratorDokumen6 halamanApplication of A Matrix Converter For The Power Control of A Variable-Speed Wind-Turbine Driving A Doubly-Fed Induction GeneratorchetanBelum ada peringkat
- Appendix 1-A Need For A Variable-Speed Drive in Wind Turbines and Their ControlDokumen3 halamanAppendix 1-A Need For A Variable-Speed Drive in Wind Turbines and Their ControlpietiscBelum ada peringkat
- A Simple Nonlinear Mathematical Model For Wind Turbine PowerDokumen4 halamanA Simple Nonlinear Mathematical Model For Wind Turbine PowerSomone SomoneBelum ada peringkat
- WindpowerDokumen24 halamanWindpowerDouglasBelum ada peringkat
- Pitch Angle ControlDokumen6 halamanPitch Angle ControlniraulBelum ada peringkat
- Research Article: Electric Control Substituting Pitch Control For Large Wind TurbinesDokumen5 halamanResearch Article: Electric Control Substituting Pitch Control For Large Wind TurbinesBruno MilanBelum ada peringkat
- Introduction to Wind Energy SystemsDokumen15 halamanIntroduction to Wind Energy SystemsMiguel Granados MorenoBelum ada peringkat
- 2.6 Wind Energy TheoryDokumen6 halaman2.6 Wind Energy TheoryAlaa TamimiBelum ada peringkat
- Probabilistic Wind Power Generation Model: Derivation and ApplicationsDokumen10 halamanProbabilistic Wind Power Generation Model: Derivation and ApplicationsSameh LotfyBelum ada peringkat
- Wind TurbineDokumen4 halamanWind TurbinepavanBelum ada peringkat
- Wind Energy CollectorsDokumen9 halamanWind Energy CollectorsVinoth ParamananthamBelum ada peringkat
- Benzen-2008-IEEE-ICSET Z-Source Inverter Based Wind Power Generation PDFDokumen5 halamanBenzen-2008-IEEE-ICSET Z-Source Inverter Based Wind Power Generation PDFAnoop MathewBelum ada peringkat
- Control The Flywheel Storage System by Fuzzy Logic Associated With The Wind GeneratorDokumen7 halamanControl The Flywheel Storage System by Fuzzy Logic Associated With The Wind GeneratorhassenbbBelum ada peringkat
- Volume (8) Issue (4) 493-507Dokumen15 halamanVolume (8) Issue (4) 493-507Seid BegovicBelum ada peringkat
- Priyanshu Thesis (1) FinalDokumen22 halamanPriyanshu Thesis (1) Finaliphone14cherishBelum ada peringkat
- A Survey On Variable-Speed Wind Turbine SystemDokumen7 halamanA Survey On Variable-Speed Wind Turbine Systeml3blackBelum ada peringkat
- Relation Wind Speed and PowerDokumen3 halamanRelation Wind Speed and PowerAwais WahabBelum ada peringkat
- Power Electronics As Efficient Interface in Dispersed Power Generation SystemsDokumen11 halamanPower Electronics As Efficient Interface in Dispersed Power Generation SystemsnmotanBelum ada peringkat
- Spiteri Winercost Workshop ProceedingsDokumen12 halamanSpiteri Winercost Workshop Proceedingssteinman1Belum ada peringkat
- Technologies For Power Generation From WindDokumen4 halamanTechnologies For Power Generation From WindSEP-PublisherBelum ada peringkat
- The Power Curve of a Wind TurbineDokumen3 halamanThe Power Curve of a Wind TurbineRasika MarketingBelum ada peringkat
- Analyzing The Functional Dynamics of Technological Innovation Systems A Scheme of Analysis - Bergek 2008Dokumen23 halamanAnalyzing The Functional Dynamics of Technological Innovation Systems A Scheme of Analysis - Bergek 2008Dimitris KostopoulosBelum ada peringkat
- Analyzing The Functional Dynamics of Technological Innovation Systems A Scheme of Analysis - Bergek 2008Dokumen23 halamanAnalyzing The Functional Dynamics of Technological Innovation Systems A Scheme of Analysis - Bergek 2008Dimitris KostopoulosBelum ada peringkat
- Design of An Inwheel MotorDokumen7 halamanDesign of An Inwheel MotorDimitris KostopoulosBelum ada peringkat
- Massachussets Network-Final Technical ReportDokumen65 halamanMassachussets Network-Final Technical ReportDimitris KostopoulosBelum ada peringkat
- High Field Magnets With HTS ConductorsDokumen7 halamanHigh Field Magnets With HTS ConductorsDimitris KostopoulosBelum ada peringkat
- MikroGrid ManagementDokumen12 halamanMikroGrid ManagementDimitris KostopoulosBelum ada peringkat
- Question Bank - HMTDokumen5 halamanQuestion Bank - HMTSUNDARAMAHALINGAM ABelum ada peringkat
- Adjustable Type EAZ SeriesDokumen8 halamanAdjustable Type EAZ SeriesVimalendra SinghBelum ada peringkat
- Tubular Bowl CentrifugeDokumen22 halamanTubular Bowl CentrifugeTouhid Islam100% (1)
- Structural Analysis of Mast of Special Rotary Drilling Rig For Transmission LineDokumen5 halamanStructural Analysis of Mast of Special Rotary Drilling Rig For Transmission LineBruno SantosBelum ada peringkat
- Din 6914-10.9 PDFDokumen2 halamanDin 6914-10.9 PDFvpjagannaathBelum ada peringkat
- Driller Controller User ManualDokumen12 halamanDriller Controller User ManualYahya BA100% (1)
- Electronic Service Tool 2015A v2Dokumen3 halamanElectronic Service Tool 2015A v2Nacer ZehaniBelum ada peringkat
- 6 Cylinder MBE906: Engine PerformanceDokumen2 halaman6 Cylinder MBE906: Engine Performanceguillermo meza huamanBelum ada peringkat
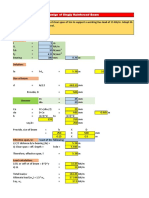
- Singly Reinforced Beam ExcelDokumen3 halamanSingly Reinforced Beam ExcelVEERKUMAR100% (3)
- Electrical System in AENDokumen21 halamanElectrical System in AENNilesh PatilBelum ada peringkat
- Optimized Design and Static, Dynamic Analysis of Disc Brake Using Finite Element AnalysisDokumen5 halamanOptimized Design and Static, Dynamic Analysis of Disc Brake Using Finite Element AnalysisVinayak ImadiBelum ada peringkat
- Science: Quarter 3 - Module 1: FrictionDokumen29 halamanScience: Quarter 3 - Module 1: FrictionTrisTan Dolojan100% (1)
- 02 Dividing Head 1Dokumen22 halaman02 Dividing Head 1farid said errahmaniBelum ada peringkat
- Al Self Priming PumpDokumen15 halamanAl Self Priming PumpHalley ElangovanBelum ada peringkat
- Marcet Boiler Final Lab ReportDokumen14 halamanMarcet Boiler Final Lab ReportHerschelle ShongweBelum ada peringkat
- Human Skin Temperature CalculationDokumen14 halamanHuman Skin Temperature CalculationRaymond FuentesBelum ada peringkat
- ORC Guide: Technology and ApplicationsDokumen26 halamanORC Guide: Technology and ApplicationsdolphinBelum ada peringkat
- 455zx - Brochure PDFDokumen16 halaman455zx - Brochure PDFDhru Ti100% (1)
- Basics of Piping System Thermal Expansion For Process EngineersDokumen14 halamanBasics of Piping System Thermal Expansion For Process EngineersGoce VasilevskiBelum ada peringkat
- Forces and Motion: Basics: Not For Sale, Exclusive For Gordon College OnlyDokumen5 halamanForces and Motion: Basics: Not For Sale, Exclusive For Gordon College OnlyAlyssa FrancoBelum ada peringkat
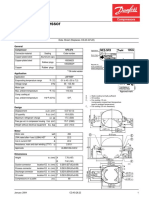
- NF5.5FX Standard Compressor R134a 115-127V 60Hz: CompressorsDokumen2 halamanNF5.5FX Standard Compressor R134a 115-127V 60Hz: CompressorsMiguel CamposBelum ada peringkat
- Boiler Furnace DefectsDokumen4 halamanBoiler Furnace DefectskrishnaBelum ada peringkat
- Central Institute of Tool DesignDokumen1 halamanCentral Institute of Tool DesignManoj SahuBelum ada peringkat
- Aerodynamics Prelim Lecture PDFDokumen4 halamanAerodynamics Prelim Lecture PDFelle liBelum ada peringkat
- ENFLO 0110 Wind Turbine Data SheetDokumen2 halamanENFLO 0110 Wind Turbine Data SheetCriss MereutaBelum ada peringkat
- Conservation of Energy Worksheet #1 - 1Dokumen3 halamanConservation of Energy Worksheet #1 - 1Alyssa ColeBelum ada peringkat
- Alfa Laval BioPharm Fittings Catalog PDFDokumen102 halamanAlfa Laval BioPharm Fittings Catalog PDFcneo59Belum ada peringkat
- Ninja Part PDFDokumen105 halamanNinja Part PDFErlangga AlamBelum ada peringkat
- Pumps HighPressureDrainage D42AB D53AB DatasheetDokumen2 halamanPumps HighPressureDrainage D42AB D53AB DatasheetMohammad ZeeshanBelum ada peringkat