Anda mungkin juga menyukai
- Navegadores WebDokumen5 halamanNavegadores WebRomain Irigoin MegoBelum ada peringkat
- Reporte de Practica 2 Subrutinas e Interrupciones en Siemens s7 200Dokumen13 halamanReporte de Practica 2 Subrutinas e Interrupciones en Siemens s7 200Daniel salgado yañezBelum ada peringkat
- 6CM1 Practica01Dokumen8 halaman6CM1 Practica01Luis MorenoBelum ada peringkat
- Conversores AD DADokumen6 halamanConversores AD DAManuel HerreraBelum ada peringkat
- Estructura Mecanica de Un RobotDokumen21 halamanEstructura Mecanica de Un RobotPalmeras01Belum ada peringkat
- Cómo Hacer Demostraciones - Lic. Ramiro Choque C PDFDokumen18 halamanCómo Hacer Demostraciones - Lic. Ramiro Choque C PDFEnrique Gerardo Arbaiza Chavez100% (1)
- Bootloader USB para PIC18F4550Dokumen9 halamanBootloader USB para PIC18F4550Maria MartinBelum ada peringkat
- Programacion de Bajo Nivel - Laboratorio 1Dokumen11 halamanProgramacion de Bajo Nivel - Laboratorio 1Maria PereaBelum ada peringkat
- El Rendimiento en Las ComputadorasDokumen8 halamanEl Rendimiento en Las ComputadorasDey100% (1)
- Manual MicroProg v1.0Dokumen16 halamanManual MicroProg v1.0Alexa CruzBelum ada peringkat
- Apuntes Procesamiento VectorialDokumen23 halamanApuntes Procesamiento VectorialLidia RondonBelum ada peringkat
- Guía Transformada de Fourier en TelecomunicacionesDokumen6 halamanGuía Transformada de Fourier en TelecomunicacionesLesbiakarina GalindezBelum ada peringkat
- Entrada y Salida en El Microcontrolador PicDokumen27 halamanEntrada y Salida en El Microcontrolador PicLuisHernandezBelum ada peringkat
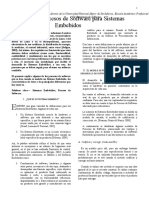
- Modelos de Procesos de Software para Sistemas EmbebidosDokumen4 halamanModelos de Procesos de Software para Sistemas EmbebidosSaroff Yataco IrrazábalBelum ada peringkat
- Programación VisualDokumen8 halamanProgramación VisualMayra PuentesBelum ada peringkat
- Programa Ensamblador Hora y FechaDokumen12 halamanPrograma Ensamblador Hora y FechaBrian CastilloBelum ada peringkat
- Cuestionario Tema 2 Prog PLC AlumnoDokumen13 halamanCuestionario Tema 2 Prog PLC AlumnoFrancisco de Paula González RodríguezBelum ada peringkat
- FA - Ejercicios de Clases C++Dokumen21 halamanFA - Ejercicios de Clases C++Jhordan Garcia HernandezBelum ada peringkat
- Programacion HibridaDokumen3 halamanProgramacion HibridaReii Sanchz100% (1)
- Abecedario 8086Dokumen7 halamanAbecedario 8086Luis de JesusBelum ada peringkat
- Arquitectura de Computadoras Multiciclo 2015Dokumen56 halamanArquitectura de Computadoras Multiciclo 2015Bman100% (2)
- Bloques FuncionalesDokumen17 halamanBloques FuncionalesOscar RmzBelum ada peringkat
- Diseño de Sistemas Digitales: "Máquina Algorítmica de Estados (Carta ASM) "Dokumen21 halamanDiseño de Sistemas Digitales: "Máquina Algorítmica de Estados (Carta ASM) "Emmanuel DíazBelum ada peringkat
- Ejercicios Básicos en AssemblerDokumen11 halamanEjercicios Básicos en AssemblerAlexandra WellsBelum ada peringkat
- Instrucciones PIC16F84A PDFDokumen44 halamanInstrucciones PIC16F84A PDFfusti_88100% (2)
- Regulacion de Intensidad de Brillo Con Led PicDokumen7 halamanRegulacion de Intensidad de Brillo Con Led PicDavid Shure Xiv100% (1)
- Modelo ElkaDokumen101 halamanModelo ElkaHoreker ReyesBelum ada peringkat
- Proyecto Final de Autómatas Aporte ColaborativoDokumen20 halamanProyecto Final de Autómatas Aporte ColaborativoJhon Wuilquer Laguna CastellanosBelum ada peringkat
- Lab 3 de IntroducionDokumen8 halamanLab 3 de IntroducionRonaldoBelum ada peringkat
- Codigo HDB3Dokumen3 halamanCodigo HDB3Cristian NuñezBelum ada peringkat
- C# Vectores de ObjetosDokumen5 halamanC# Vectores de ObjetosVictor SnowBelum ada peringkat
- Práctica de Laboratorio Características y Dispositivos Del Modelo OSIDokumen1 halamanPráctica de Laboratorio Características y Dispositivos Del Modelo OSIJavier VillanuevaBelum ada peringkat
- CALIDAD DE SOFTWARE - Mapa ConceptualDokumen1 halamanCALIDAD DE SOFTWARE - Mapa ConceptualANDRES FELIPE MUNOZ DAZABelum ada peringkat
- Funcionamiento de La CpuDokumen5 halamanFuncionamiento de La CpuMartha BarahonaBelum ada peringkat
- Implementacion de Pilas y Colas en CDokumen16 halamanImplementacion de Pilas y Colas en CJosé Ignacio Garrido Muñoz100% (2)
- Diagrama de Flujo o Algoritmo Del Metodo de Acceso CsmaDokumen1 halamanDiagrama de Flujo o Algoritmo Del Metodo de Acceso CsmaJediael LopezBelum ada peringkat
- Manual lABvIEWDokumen57 halamanManual lABvIEWjmgonz265Belum ada peringkat
- 3 y 3.1 Tecnicas de Diseño DetalladoDokumen13 halaman3 y 3.1 Tecnicas de Diseño DetalladoAnonymous RwenpL1q100% (1)
- Practica Del DisplayDokumen5 halamanPractica Del Displayalupollo100% (1)
- Programa Fibonacci EnsambladorDokumen9 halamanPrograma Fibonacci Ensambladormiguel_munoz290% (2)
- Laboratorio Calculadora BinariaDokumen7 halamanLaboratorio Calculadora BinariaNicolas OtavoBelum ada peringkat
- II. RecursividadDokumen47 halamanII. RecursividadMayumi AlRuBelum ada peringkat
- Lab 02 Transformada Z InversaDokumen3 halamanLab 02 Transformada Z InversaJavier EsquivelBelum ada peringkat
- PRACTICA No3 MEZCLADORA STEP 7 PDFDokumen7 halamanPRACTICA No3 MEZCLADORA STEP 7 PDFPaul SearsBelum ada peringkat
- Programar Memoria 28c64Dokumen25 halamanProgramar Memoria 28c64Leonardo CorredorBelum ada peringkat
- Maquinas de Turing EXAMENDokumen43 halamanMaquinas de Turing EXAMENjrobertnettBelum ada peringkat
- Algoritmo QUADTREEDokumen57 halamanAlgoritmo QUADTREEJesús Mendoza HuillcaBelum ada peringkat
- Curso en Línea Programación de Microcontroladores Industriales Hércules ARM PDFDokumen6 halamanCurso en Línea Programación de Microcontroladores Industriales Hércules ARM PDFMartha Jesus ZBelum ada peringkat
- Codificadores y DecodificadoresDokumen38 halamanCodificadores y Decodificadoreszoru_hatakeBelum ada peringkat
- Profinet IEEEDokumen5 halamanProfinet IEEEJoseph MontenegroBelum ada peringkat
- Diseño Basado en PatronesDokumen30 halamanDiseño Basado en PatronesKari Mosquera100% (3)
- PLC UnidadDokumen23 halamanPLC UnidadJuan AntonioBelum ada peringkat
- P - 5 - v2Dokumen66 halamanP - 5 - v2Cesar HurtadoBelum ada peringkat
- Técnicas de ProgramaciónDokumen49 halamanTécnicas de Programaciónedgarnoelr100% (7)
- T1 ProblemasDokumen4 halamanT1 ProblemasMiguelMoretónBelum ada peringkat
- T1 ProblemasDokumen4 halamanT1 ProblemasDavid MorillasBelum ada peringkat
- Procesamiento en Pipeline (Segmentación)Dokumen9 halamanProcesamiento en Pipeline (Segmentación)Joskani MendozaBelum ada peringkat
- ARQII Practica1 2016Dokumen5 halamanARQII Practica1 2016David DelgadoBelum ada peringkat
- Ciclo de InstrucciónDokumen7 halamanCiclo de InstrucciónSandy TomalaBelum ada peringkat
- Problems Chapter1 PDFDokumen4 halamanProblems Chapter1 PDForialBelum ada peringkat
- Contador Binario y HexadecimalDokumen6 halamanContador Binario y Hexadecimalisaac19Belum ada peringkat
- Desarrollo de componentes software para servicios de comunicaciones. IFCT0609Dari EverandDesarrollo de componentes software para servicios de comunicaciones. IFCT0609Belum ada peringkat
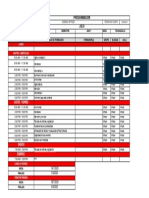
- Programacion Teusaquillo 4 PDFDokumen1 halamanProgramacion Teusaquillo 4 PDFsofiaBelum ada peringkat
- Datos Del Solicitante: Sistema de Gestión Documental Con Firma DigitalDokumen1 halamanDatos Del Solicitante: Sistema de Gestión Documental Con Firma DigitalRuth Angélica MAITA NIZAMABelum ada peringkat
- ACTIVIDAD 3.1. Pruebas de TraducciónDokumen5 halamanACTIVIDAD 3.1. Pruebas de TraducciónBeatriz AparicioBelum ada peringkat
- Conjugación de VerbosDokumen2 halamanConjugación de VerbosmattatosBelum ada peringkat
- EVALUACIÓN 1 - PautaDokumen2 halamanEVALUACIÓN 1 - PautaMaría José Espinoza100% (1)
- Universidad Militar Nueva Granada Digitales y Laboratorio Profesora: Ing. Luisa Fernanda García Vargas Ph. DDokumen2 halamanUniversidad Militar Nueva Granada Digitales y Laboratorio Profesora: Ing. Luisa Fernanda García Vargas Ph. DEdward EstacioBelum ada peringkat
- Cómo Ser Un Buen AutodidactaDokumen7 halamanCómo Ser Un Buen Autodidactakilofome05Belum ada peringkat
- Prueba Plan Lector - Historia de La Gaviota y DelDokumen4 halamanPrueba Plan Lector - Historia de La Gaviota y DelMarcela Cisterna ColéBelum ada peringkat
- Guillermo Bonfil Batalla - El Pensamiento Mexicano Ante La Condición Humana PDFDokumen10 halamanGuillermo Bonfil Batalla - El Pensamiento Mexicano Ante La Condición Humana PDFDulce AguirreBelum ada peringkat
- Álvarez de La Cruz, Tesis, 2014 PDFDokumen276 halamanÁlvarez de La Cruz, Tesis, 2014 PDFDaniel ErazoBelum ada peringkat
- Practica 1 Elt Mamani Choque AlvaroDokumen8 halamanPractica 1 Elt Mamani Choque AlvaroAlvaro Mamani ChoqueBelum ada peringkat
- Dossier El Canibal PDFDokumen17 halamanDossier El Canibal PDFJuan TerranovaBelum ada peringkat
- La Mayordomía de José 240313Dokumen2 halamanLa Mayordomía de José 240313Rogerio Mongelos Tatsch75% (4)
- Genesis Genesis: ' TSLXX: ' TSLXXDokumen5 halamanGenesis Genesis: ' TSLXX: ' TSLXXBen RequenaBelum ada peringkat
- Pasos para Recibir Un MilagroDokumen3 halamanPasos para Recibir Un MilagroEliza De LopezBelum ada peringkat
- Como Hacer Un InformeDokumen4 halamanComo Hacer Un InformeAsociación TatuadoresBelum ada peringkat
- Cuestionario Segundo Parcial Filosofía Del DerechoDokumen4 halamanCuestionario Segundo Parcial Filosofía Del Derechojeraldin jimenezBelum ada peringkat
- ConditionalsDokumen5 halamanConditionalsLaura GPBelum ada peringkat
- Salmo 117 Teología y MisiónDokumen15 halamanSalmo 117 Teología y Misiónsebangelico4677Belum ada peringkat
- Ansart - Los Imaginarios SocialesDokumen11 halamanAnsart - Los Imaginarios SocialesPatricio Alejandro DurigonBelum ada peringkat
- Introducción Al Curso RsLogix 5000 y Conceptos Básicos.Dokumen11 halamanIntroducción Al Curso RsLogix 5000 y Conceptos Básicos.TNastecaBelum ada peringkat
- Material BDDokumen36 halamanMaterial BDxiancerberoBelum ada peringkat
- Articulación Fonema K 1ero BásicoDokumen8 halamanArticulación Fonema K 1ero BásicoAndreaBelum ada peringkat
- España en Las AméricasDokumen3 halamanEspaña en Las AméricasJohn WickBelum ada peringkat
- Textos FuncionalesDokumen15 halamanTextos FuncionalesGutierrez JuanBelum ada peringkat
- Semana 3Dokumen10 halamanSemana 3Javier SolariBelum ada peringkat
- Desproteger Una Planilla ExcelDokumen3 halamanDesproteger Una Planilla ExcelLewis Laya GonzalezBelum ada peringkat
- 1 Elaboracion Plan de Trabajo Decreto Inclusion CLMDokumen19 halaman1 Elaboracion Plan de Trabajo Decreto Inclusion CLMVic SosaBelum ada peringkat