Anda mungkin juga menyukai
- Seguridad en La Operación de Maquinarias PesadasDokumen18 halamanSeguridad en La Operación de Maquinarias PesadasEdward Cayetano Arreaga100% (1)
- Evidencia Matriz Legal SG SST AA2 EV02Dokumen8 halamanEvidencia Matriz Legal SG SST AA2 EV02Yohana CastilloBelum ada peringkat
- Reglamento Interno de Trabajo La MundialDokumen22 halamanReglamento Interno de Trabajo La MundialKARLA MARIA LANZA ZAVALABelum ada peringkat
- archivetempTA2 Spanish - Track-Type TractorDokumen47 halamanarchivetempTA2 Spanish - Track-Type Tractorshirley bustos14Belum ada peringkat
- Regimen Laboral Publico PERUDokumen383 halamanRegimen Laboral Publico PERULiz Espinoza100% (3)
- América en Revolución - Resumen de ChumbitaDokumen6 halamanAmérica en Revolución - Resumen de ChumbitaTomás Oñate Rutolo100% (1)
- BrochureDokumen9 halamanBrochureEdwin ValdiviaBelum ada peringkat
- Secuencia de Tecnol 7mo Grado Seño Lore OlmosDokumen40 halamanSecuencia de Tecnol 7mo Grado Seño Lore OlmosGonzy Diaz Páez100% (1)
- Redes Cisco Ccna CompressedDokumen20 halamanRedes Cisco Ccna CompressedDaniel Gil CastilloBelum ada peringkat
- Verbos en Ingles Con EjemplosDokumen21 halamanVerbos en Ingles Con EjemplosWilliam Giovanni OrozcoBelum ada peringkat
- Análisis estructural I: Estabilidad geométrica y métodos de análisisDokumen9 halamanAnálisis estructural I: Estabilidad geométrica y métodos de análisisJhon JC100% (1)
- Fepip Modulo de Evaluacion PúblicaDokumen72 halamanFepip Modulo de Evaluacion PúblicaRicardo ValladaresBelum ada peringkat
- Informe N 03 Empleabilidad de La Brujula Cinta Metrica y Cinta Con Angulos HorizontalesDokumen11 halamanInforme N 03 Empleabilidad de La Brujula Cinta Metrica y Cinta Con Angulos HorizontalesWILLY DARIO FLORES DE LA CRUZBelum ada peringkat
- 0812 Pavimentos Clase 01 IntroduccionDokumen38 halaman0812 Pavimentos Clase 01 IntroduccionHugoCentenoCerasBelum ada peringkat
- Salsa de ají gourmet Sumaq: estudio de mercado y plan estratégicoDokumen216 halamanSalsa de ají gourmet Sumaq: estudio de mercado y plan estratégicoabenitechBelum ada peringkat
- Ingenieria y Medio Ambiente LG Empresa Individual de Responsabilidad LimitadDokumen2 halamanIngenieria y Medio Ambiente LG Empresa Individual de Responsabilidad LimitadChristy ZamoraBelum ada peringkat
- Plan de Estudios Ingeniería SistemasDokumen18 halamanPlan de Estudios Ingeniería SistemasLu NizBelum ada peringkat
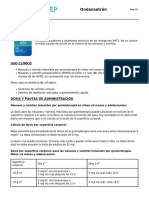
- OndansetrónDokumen5 halamanOndansetrónKaren VertizblancoBelum ada peringkat
- Examen Final MercadeoDokumen21 halamanExamen Final MercadeonayibiBelum ada peringkat
- Disipación de Rentas para ExponerDokumen6 halamanDisipación de Rentas para ExponerFabio Gamarra Mamani0% (1)
- SILABO de Didactica General RevisadoDokumen8 halamanSILABO de Didactica General RevisadoElenita Castillo HBelum ada peringkat
- Certificado para Anthony GalarzaDokumen1 halamanCertificado para Anthony GalarzaAnthony GalarzaBelum ada peringkat
- Mini Manual Vag-ComDokumen3 halamanMini Manual Vag-ComMauricio Garcia VentBelum ada peringkat
- Revista No. 98Dokumen21 halamanRevista No. 98Eduardo AlayonBelum ada peringkat
- dv5 2247laDokumen2 halamandv5 2247laYulian BastoBelum ada peringkat
- Sistemas Eléctricos de Potencia: Ingeniería en ElectromecánicaDokumen7 halamanSistemas Eléctricos de Potencia: Ingeniería en ElectromecánicaAna MarreroBelum ada peringkat
- Trabajo #02 Dinamica Grupo N°03 Yugo EscosesDokumen12 halamanTrabajo #02 Dinamica Grupo N°03 Yugo EscosesLiz RiveraBelum ada peringkat
- Guía Del Laboratorio Regresión Lineal MúltipleDokumen9 halamanGuía Del Laboratorio Regresión Lineal MúltipleMercedes ToribioBelum ada peringkat
- El Consumidor Es El ReyDokumen20 halamanEl Consumidor Es El ReyMaria Del Carmen Chavez LamasBelum ada peringkat
- Universidad Nacional Abierta Producto 1Dokumen10 halamanUniversidad Nacional Abierta Producto 1jonasBelum ada peringkat