Anda mungkin juga menyukai
- SAR AUN-QA MechanicalEngDokumen88 halamanSAR AUN-QA MechanicalEngalexlenevez_1213Belum ada peringkat
- Lecture: PLC Hardware: Programmable ControllersDokumen18 halamanLecture: PLC Hardware: Programmable Controllersalexlenevez_1213Belum ada peringkat
- SET-320. DC Motors Speed Synchronization For Rolling Mills PDFDokumen3 halamanSET-320. DC Motors Speed Synchronization For Rolling Mills PDFalexlenevez_121350% (2)
- History of Nutrient RemovalDokumen31 halamanHistory of Nutrient Removalalexlenevez_1213Belum ada peringkat
- CHP 1 StudyDokumen16 halamanCHP 1 Studykenshin1989Belum ada peringkat
- Lab5a Fa10Dokumen4 halamanLab5a Fa10alexlenevez_12130% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Datasheet TBJ SBW13009-KDokumen5 halamanDatasheet TBJ SBW13009-KMarquinhosCostaBelum ada peringkat
- Review of Ventura's "An Overview of Child Psychology in The Philippines"Dokumen2 halamanReview of Ventura's "An Overview of Child Psychology in The Philippines"Irene CayeBelum ada peringkat
- Ericsson AXE 810: Switch (ROTD)Dokumen4 halamanEricsson AXE 810: Switch (ROTD)Kao Sun HoBelum ada peringkat
- BIOL 2300 Homework 2 Summer2019Dokumen2 halamanBIOL 2300 Homework 2 Summer2019Tanner JohnsonBelum ada peringkat
- Answer KeyDokumen4 halamanAnswer KeyLouina YnciertoBelum ada peringkat
- SBU PlanningDokumen13 halamanSBU PlanningMohammad Raihanul HasanBelum ada peringkat
- 10 1 3 RMDDokumen5 halaman10 1 3 RMDRay GalfianBelum ada peringkat
- Liquid Process Piping - Part 1 General Piping Design PDFDokumen33 halamanLiquid Process Piping - Part 1 General Piping Design PDFnitin guptaBelum ada peringkat
- Fluid Mechanics HydraulicsDokumen420 halamanFluid Mechanics Hydraulicsanonymousdi3noBelum ada peringkat
- Peter Brandt InterviewDokumen38 halamanPeter Brandt InterviewNishant P Kalaskar100% (1)
- Bagi CHAPT 7 TUGAS INGGRIS W - YAHIEN PUTRIDokumen4 halamanBagi CHAPT 7 TUGAS INGGRIS W - YAHIEN PUTRIYahien PutriBelum ada peringkat
- Root End Filling MaterialsDokumen9 halamanRoot End Filling MaterialsRuchi ShahBelum ada peringkat
- Jungbluth Main Catalogue-LanacDokumen60 halamanJungbluth Main Catalogue-LanacMilenkoBogdanovicBelum ada peringkat
- Bo Sanchez-Turtle Always Wins Bo SanchezDokumen31 halamanBo Sanchez-Turtle Always Wins Bo SanchezCristy Louela Pagapular88% (8)
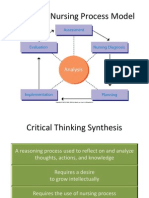
- NUR 104 Nursing Process MY NOTESDokumen77 halamanNUR 104 Nursing Process MY NOTESmeanne073100% (1)
- Anansi and His Six Sons An African MythDokumen3 halamanAnansi and His Six Sons An African MythShar Nur JeanBelum ada peringkat
- Questionnaire OriginalDokumen6 halamanQuestionnaire OriginalJAGATHESANBelum ada peringkat
- Faculty of AyurvedaDokumen9 halamanFaculty of AyurvedaKirankumar MutnaliBelum ada peringkat
- TheBigBookOfTeamCulture PDFDokumen231 halamanTheBigBookOfTeamCulture PDFavarus100% (1)
- Introduction of Woman Role in SocietyDokumen12 halamanIntroduction of Woman Role in SocietyApple DogBelum ada peringkat
- PICUDokumen107 halamanPICUsarikaBelum ada peringkat
- Maxwell's Equations and Stoke's TheoremDokumen26 halamanMaxwell's Equations and Stoke's TheoremTuya ErdenejargalBelum ada peringkat
- Recruitment Process Outsourcing PDFDokumen4 halamanRecruitment Process Outsourcing PDFDevesh NamdeoBelum ada peringkat
- Discover India, January 2018Dokumen51 halamanDiscover India, January 2018calebfriesenBelum ada peringkat
- MINDSET 1 EXERCISES TEST 1 Pendientes 1º Bach VOCABULARY AND GRAMMARDokumen7 halamanMINDSET 1 EXERCISES TEST 1 Pendientes 1º Bach VOCABULARY AND GRAMMARanaBelum ada peringkat
- PS410Dokumen2 halamanPS410Kelly AnggoroBelum ada peringkat
- AMC Middle Primary Years 3 and 4 - SolutionsDokumen6 halamanAMC Middle Primary Years 3 and 4 - SolutionsSherry JiangBelum ada peringkat
- STRESS HealthDokumen40 halamanSTRESS HealthHajra KhanBelum ada peringkat
- Bhagavatam English Chapter 10bDokumen22 halamanBhagavatam English Chapter 10bsrimatsimhasaneshwarBelum ada peringkat
- Metro Depot: (Aar 422) Pre-Thesis SeminarDokumen3 halamanMetro Depot: (Aar 422) Pre-Thesis SeminarSri VirimchiBelum ada peringkat