Anda mungkin juga menyukai
- Effort Dans Les Plaques PDFDokumen11 halamanEffort Dans Les Plaques PDFchouidiBelum ada peringkat
- CoquesDokumen78 halamanCoquesckraplerBelum ada peringkat
- Plaques Et Coques - Efforts IntDokumen8 halamanPlaques Et Coques - Efforts IntMartinBelum ada peringkat
- Mini Projet de Dynamique PDFDokumen16 halamanMini Projet de Dynamique PDFYoussef YozarBelum ada peringkat
- VI Etude Des Elements PorteursDokumen41 halamanVI Etude Des Elements PorteursMohcene BoukhezarBelum ada peringkat
- Verification RPA99V2003 Avec RSADokumen16 halamanVerification RPA99V2003 Avec RSACivil AbdouBelum ada peringkat
- 05 Etude Sismique PDFDokumen31 halaman05 Etude Sismique PDFBoss MohamedBelum ada peringkat
- Chapitre IV - Calcul Des Charges Climatiques Selon NV 65Dokumen119 halamanChapitre IV - Calcul Des Charges Climatiques Selon NV 65Omar SnoussiBelum ada peringkat
- DS CM Enis 2018Dokumen2 halamanDS CM Enis 2018Ahmed ZaraBelum ada peringkat
- Thermique Corrigé PortiqueDokumen3 halamanThermique Corrigé PortiqueguessousBelum ada peringkat
- Radier CirculaireDokumen4 halamanRadier CirculairesalifsyBelum ada peringkat
- CH.3 - Calcul Des PannesDokumen20 halamanCH.3 - Calcul Des PannesSTEPANEBelum ada peringkat
- 6-Flexion Plane PDFDokumen2 halaman6-Flexion Plane PDFpascalBelum ada peringkat
- TD-MMC Series 3 4 2020-21Dokumen4 halamanTD-MMC Series 3 4 2020-21Nowe AhmadeBelum ada peringkat
- TD Corrigé Plaques Et CoquesDokumen3 halamanTD Corrigé Plaques Et CoquesALA EDDINE AbdelmoulaBelum ada peringkat
- Exemple de Calcul Au VentDokumen9 halamanExemple de Calcul Au VentAdel NeymoBelum ada peringkat
- Cours Calcul Des Structures - Partie 3 - Théorie Des PlaquesDokumen52 halamanCours Calcul Des Structures - Partie 3 - Théorie Des PlaquesJean KouassiBelum ada peringkat
- Calcul Des StructuresDokumen10 halamanCalcul Des Structureslahlou_d9216100% (2)
- TD Base Des Poteaux EncastrésDokumen3 halamanTD Base Des Poteaux EncastrésMidou MhmdBelum ada peringkat
- Merged 20200620 161100Dokumen28 halamanMerged 20200620 161100Johnny KozyBelum ada peringkat
- Downloadfile 7Dokumen6 halamanDownloadfile 7HIMRI DOUNIA MALAKBelum ada peringkat
- Methode Des ForcesDokumen24 halamanMethode Des ForcesPaul Aristide Mbog100% (1)
- CSPlas 2Dokumen16 halamanCSPlas 2KangamaBelum ada peringkat
- Trame de TorsionDokumen32 halamanTrame de TorsionwalidBelum ada peringkat
- Exercices FlambementDokumen2 halamanExercices FlambementSaharBelum ada peringkat
- Chapitre 2 - Coupole - Final Cours + TD 2021-2022Dokumen16 halamanChapitre 2 - Coupole - Final Cours + TD 2021-2022Madi OucheneBelum ada peringkat
- Série 2 Structures Metalliques Master1 S1Dokumen2 halamanSérie 2 Structures Metalliques Master1 S1Bãdïs BäBelum ada peringkat
- 394 PDFDokumen74 halaman394 PDFChawkiBelum ada peringkat
- Analyse Structurale D'un Portique Simple À l'EC3.Y.galeADokumen13 halamanAnalyse Structurale D'un Portique Simple À l'EC3.Y.galeASebastien Cabot100% (1)
- Debuter Avec Cast3MDokumen136 halamanDebuter Avec Cast3MAbeka KaderBelum ada peringkat
- TD ParasismiqueDokumen2 halamanTD ParasismiqueMaroua LahbibBelum ada peringkat
- Chapitre 11 Tenseur de Déformation PDFDokumen10 halamanChapitre 11 Tenseur de Déformation PDFSmail Benidir100% (1)
- Calcul Des PannesDokumen12 halamanCalcul Des Pannesthouleija100% (1)
- Plancher NervureDokumen53 halamanPlancher NervureThouleija AyachiBelum ada peringkat
- Cours MefDokumen58 halamanCours MefMohcenLaribi50% (2)
- Eurocode 0 Et Eurocode 1 Actions Et Combinaisons Niveau 1 BAS01 PDFDokumen2 halamanEurocode 0 Et Eurocode 1 Actions Et Combinaisons Niveau 1 BAS01 PDFOUEDRAOGO IdrissaBelum ada peringkat
- PS P&C Enis GC2 2021-22Dokumen5 halamanPS P&C Enis GC2 2021-22elleuch sourourBelum ada peringkat
- CH. 7 Calcul Des FermesDokumen25 halamanCH. 7 Calcul Des FermesGuillaume HOUNAKEBelum ada peringkat
- Cours Vérification Des SectionsDokumen15 halamanCours Vérification Des SectionsBadr MoutassarefBelum ada peringkat
- TD 01 - Mur de SoutènementDokumen9 halamanTD 01 - Mur de Soutènementزوزو جيجيBelum ada peringkat
- DTR C 2.4.7 Da Exemples D Application Reglement Neige Et VentDokumen30 halamanDTR C 2.4.7 Da Exemples D Application Reglement Neige Et VentMidoun NadjibBelum ada peringkat
- Poutre-Plast (Exercices Elasto Plasticité)Dokumen4 halamanPoutre-Plast (Exercices Elasto Plasticité)Abderrahmen LaouiniBelum ada peringkat
- Chapitre V Ferraillage Des Poteaux Poutres Finale 1 OKDokumen45 halamanChapitre V Ferraillage Des Poteaux Poutres Finale 1 OKSherif Running AwayBelum ada peringkat
- Dtu 13.12Dokumen23 halamanDtu 13.12asdasBelum ada peringkat
- Cours - CM - 1 - Chapitre - 5 - Partie - 1 - Assemblages Boulonnés en CM - 08 - 09Dokumen38 halamanCours - CM - 1 - Chapitre - 5 - Partie - 1 - Assemblages Boulonnés en CM - 08 - 09Neo PacifistaBelum ada peringkat
- Calcul Et Conception Des Silos Et Reservoirs Metalliques: Université Mouloud Mammeri de Tizi-OuzouDokumen47 halamanCalcul Et Conception Des Silos Et Reservoirs Metalliques: Université Mouloud Mammeri de Tizi-Ouzoubekhairia loubnaBelum ada peringkat
- Vent EcDokumen28 halamanVent EcSpihanorBelum ada peringkat
- RDM Exercice Methode de Rotation N°2Dokumen6 halamanRDM Exercice Methode de Rotation N°2Simo RdBelum ada peringkat
- Henry Thonier Projet de BApdf PDFDokumen133 halamanHenry Thonier Projet de BApdf PDFOmar ATEBelum ada peringkat
- TD5 Corrige Dass GCV3 IpsasDokumen9 halamanTD5 Corrige Dass GCV3 IpsasRami Zekri100% (1)
- CoupolesDokumen5 halamanCoupolesAyoub Frigini100% (1)
- Chap VI FlambementDokumen10 halamanChap VI FlambementAli EmbarecBelum ada peringkat
- Exemples Patrick PaultreDokumen41 halamanExemples Patrick Paultremostefaoui mohammed100% (1)
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysDari EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysBelum ada peringkat
- Leçons sur les séries trigonométriques : professées au Collège de FranceDari EverandLeçons sur les séries trigonométriques : professées au Collège de FranceBelum ada peringkat
- Corrige Problem Physique12Dokumen16 halamanCorrige Problem Physique12Junior OnanaBelum ada peringkat
- Corrige Optique TD Serie 1 by Team VioletDokumen4 halamanCorrige Optique TD Serie 1 by Team VioletStéphane LeundeBelum ada peringkat
- Theorie Des CoquesDokumen10 halamanTheorie Des CoquesMarioBelum ada peringkat
- CCP 2006 MP m2 CorrigeDokumen6 halamanCCP 2006 MP m2 Corrigesemeh sghaierBelum ada peringkat
- Utilisation Des MatériauxDokumen1 halamanUtilisation Des MatériauxThibault CostetBelum ada peringkat
- CECO-12993 Guide Conception Assemblage MAJ 2020 WEB-reduitDokumen120 halamanCECO-12993 Guide Conception Assemblage MAJ 2020 WEB-reduitThibault CostetBelum ada peringkat
- Dtu 13.1Dokumen19 halamanDtu 13.1Thibault Costet100% (1)
- Chapitre 6 - Les Dallages PDFDokumen54 halamanChapitre 6 - Les Dallages PDFDiogoPintoTarrafa100% (2)
- Le Projet de Béton Armé ThonierDokumen125 halamanLe Projet de Béton Armé ThonierSofien TaghoutiBelum ada peringkat
- MR012 Catalogue-TechniqueDokumen304 halamanMR012 Catalogue-TechniqueThibault CostetBelum ada peringkat
- Forme de CadreDokumen12 halamanForme de CadreRiadh Trabelsi100% (3)
- Chapitre 4 - Les Murs en Bã©tonDokumen58 halamanChapitre 4 - Les Murs en Bã©tontotololomomoBelum ada peringkat
- Guide Renovation ThermiqueDokumen60 halamanGuide Renovation ThermiqueThibault CostetBelum ada peringkat
- Théorie Généraledes CoquesDokumen120 halamanThéorie Généraledes CoquesThibault Costet100% (1)
- 2012 03 01 Chapitre 1Dokumen84 halaman2012 03 01 Chapitre 1Maher MaximusBelum ada peringkat
- Règles PS 92 (DTU NF P06-013)Dokumen198 halamanRègles PS 92 (DTU NF P06-013)Delta_3083% (6)
- Aide Memoire Eurocode 5Dokumen19 halamanAide Memoire Eurocode 5tibus26Belum ada peringkat
- Tableaux Permanentes Et SurchargesDokumen9 halamanTableaux Permanentes Et SurchargesChoo JaaBelum ada peringkat
- Note de Calcul - Plancher Mixte Inda PDFDokumen6 halamanNote de Calcul - Plancher Mixte Inda PDFThibault CostetBelum ada peringkat
- Effort Dans Les PlaquesDokumen11 halamanEffort Dans Les PlaquesThibault CostetBelum ada peringkat
- Reglementation Eurocode2 (Beton Armé)Dokumen24 halamanReglementation Eurocode2 (Beton Armé)mriliBelum ada peringkat
- Pathologies Et Réparations Structurales-Ppt-Pdf-2011Dokumen232 halamanPathologies Et Réparations Structurales-Ppt-Pdf-2011mrili100% (7)
- Eurocode 8Dokumen33 halamanEurocode 8Thibault CostetBelum ada peringkat
- DTU 13 2 Partie 1 P 11 212 Cahier Des Clauses TechniquesDokumen102 halamanDTU 13 2 Partie 1 P 11 212 Cahier Des Clauses TechniquesThibault CostetBelum ada peringkat
- Pathologie Des ConstructionDokumen91 halamanPathologie Des ConstructionThibault CostetBelum ada peringkat
- Reglementation Eurocode2 (Beton Armé)Dokumen24 halamanReglementation Eurocode2 (Beton Armé)mriliBelum ada peringkat
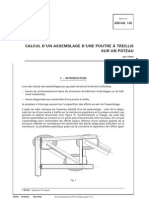
- Calcul Assemblage Poutre À Treillis Sur PoteauDokumen20 halamanCalcul Assemblage Poutre À Treillis Sur Poteaudouera16100% (2)
- Fondations SP Ciales Et Reprise en Sous-Oeuvre Marcel Forni EyrollesDokumen177 halamanFondations SP Ciales Et Reprise en Sous-Oeuvre Marcel Forni EyrollesAbdou Hababa100% (1)
- Consolidation Des SolsDokumen43 halamanConsolidation Des SolsThibault CostetBelum ada peringkat
- Calcul Colonnes BallastéesDokumen6 halamanCalcul Colonnes BallastéesThibault CostetBelum ada peringkat
- Règles PS 92 (DTU NF P06-013)Dokumen198 halamanRègles PS 92 (DTU NF P06-013)Delta_3083% (6)
- Module BoisDokumen4 halamanModule BoisThibault CostetBelum ada peringkat
- C9 T2 Confortement Parasismique OFEV 2008Dokumen86 halamanC9 T2 Confortement Parasismique OFEV 2008Noureddine DjerroudBelum ada peringkat