Anda mungkin juga menyukai
- Harmonic Maps and Minimal Immersions with Symmetries (AM-130), Volume 130: Methods of Ordinary Differential Equations Applied to Elliptic Variational Problems. (AM-130)Dari EverandHarmonic Maps and Minimal Immersions with Symmetries (AM-130), Volume 130: Methods of Ordinary Differential Equations Applied to Elliptic Variational Problems. (AM-130)Belum ada peringkat
- Stability in The Models of Real World Phenomena: A.A. MartunyukDokumen46 halamanStability in The Models of Real World Phenomena: A.A. Martunyukada sdgsdBelum ada peringkat
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Dari EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Belum ada peringkat
- ResearchDokumen4 halamanResearchAamir MukhtarBelum ada peringkat
- Some Modified Matrix Eigenvalue: E 2 (X), (A I) A (X) - (9) ) - A (A) O'i (A O'2 (A A, (A) 21 (A) 22 (A) 2, (A)Dokumen17 halamanSome Modified Matrix Eigenvalue: E 2 (X), (A I) A (X) - (9) ) - A (A) O'i (A O'2 (A A, (A) 21 (A) 22 (A) 2, (A)Satyavir YadavBelum ada peringkat
- Necessary and Sufficient Condition For A Set of Matrices To CommuteDokumen14 halamanNecessary and Sufficient Condition For A Set of Matrices To CommuteA ABelum ada peringkat
- Convergence in Nonlinear Systems With A Forcing Term: 1 PreliminarsDokumen4 halamanConvergence in Nonlinear Systems With A Forcing Term: 1 PreliminarsprofjnapolesBelum ada peringkat
- A Note On Rakotch ContractionsDokumen7 halamanA Note On Rakotch ContractionsTalha WaheedBelum ada peringkat
- Instability of A Nonlinear Differential Equation of Fifth Order With Variable DelayDokumen3 halamanInstability of A Nonlinear Differential Equation of Fifth Order With Variable DelayChernet TugeBelum ada peringkat
- Nbody DissipativeDokumen44 halamanNbody DissipativeFulana SchlemihlBelum ada peringkat
- Common Fixed Point Theorems in Fuzzy Metric Spaces: International Mathematical Forum, 5, 2010, No. 30, 1463 - 1471Dokumen9 halamanCommon Fixed Point Theorems in Fuzzy Metric Spaces: International Mathematical Forum, 5, 2010, No. 30, 1463 - 1471Nandhana NandhanaBelum ada peringkat
- Stability and Robust Stabilization of 2-D Continuous Systems in Roesser Model Based On GKYP LemmaDokumen12 halamanStability and Robust Stabilization of 2-D Continuous Systems in Roesser Model Based On GKYP LemmaIsmail ErrachidBelum ada peringkat
- ENEE 660 HW Sol #3Dokumen13 halamanENEE 660 HW Sol #3PeacefulLion100% (1)
- A Note On The Perron Instability Theorem: Una Nota Sobre El Teorema de Inestabilidad de PerronDokumen8 halamanA Note On The Perron Instability Theorem: Una Nota Sobre El Teorema de Inestabilidad de PerronRICARDO LUCIO MAMANI SUCABelum ada peringkat
- Differentialequations EC400 MT2013 PDFDokumen20 halamanDifferentialequations EC400 MT2013 PDFAvijit PuriBelum ada peringkat
- Impulsive Stabilization of Delay Differential Systems Via The Lyapunov-Razumikhin MethodDokumen7 halamanImpulsive Stabilization of Delay Differential Systems Via The Lyapunov-Razumikhin MethodKaradiasBelum ada peringkat
- Approximation of The Zakai Equation in A Nonlinear Filtering Problem With DelayDokumen10 halamanApproximation of The Zakai Equation in A Nonlinear Filtering Problem With DelaySolomon AntoniouBelum ada peringkat
- Tutorial 8: SC-116 Algebraic Structures Autumn 2015 (Linear Transformations)Dokumen1 halamanTutorial 8: SC-116 Algebraic Structures Autumn 2015 (Linear Transformations)pankajBelum ada peringkat
- Semi Weakly Compatibility of Maps in Fuzzy Metric Space: Faculty, National Institute of Technology, Warangal, IndiaDokumen6 halamanSemi Weakly Compatibility of Maps in Fuzzy Metric Space: Faculty, National Institute of Technology, Warangal, IndiaTJPRC PublicationsBelum ada peringkat
- Vibrations of StructuresDokumen9 halamanVibrations of StructuresRafaAlmeidaBelum ada peringkat
- 10 1 1 457 1165 PDFDokumen30 halaman10 1 1 457 1165 PDFvamshiBelum ada peringkat
- Engineering Journal Gap Functions and Error Bound To Set-Valued Variational InequalitiesDokumen7 halamanEngineering Journal Gap Functions and Error Bound To Set-Valued Variational InequalitiesEngineering JournalBelum ada peringkat
- Existence of Almost Automorphic Solutions of Neutral Functional Differential EquationDokumen8 halamanExistence of Almost Automorphic Solutions of Neutral Functional Differential Equationsghoul795Belum ada peringkat
- QB Second OrderDokumen9 halamanQB Second OrderprofjnapolesBelum ada peringkat
- On Lorentzian Concircular Structure Manifolds Satidfying Certain ConditionsDokumen7 halamanOn Lorentzian Concircular Structure Manifolds Satidfying Certain ConditionsSunil YadavBelum ada peringkat
- An Application of The Stochastic Mcshane'S Equations in Financial ModellingDokumen9 halamanAn Application of The Stochastic Mcshane'S Equations in Financial ModellingGonzalo SaavedraBelum ada peringkat
- Ber KaneDokumen6 halamanBer KaneSamar AhmedBelum ada peringkat
- Collocation Solutions of A Weakly Singular Volterra Integral EquationDokumen10 halamanCollocation Solutions of A Weakly Singular Volterra Integral EquationGaurav LathwalBelum ada peringkat
- Optimal Control For Linear Systems: Spring 2010 Final ExamDokumen2 halamanOptimal Control For Linear Systems: Spring 2010 Final ExamYang ZhangBelum ada peringkat
- Lecture FloquetDokumen4 halamanLecture FloquetSaid SaidBelum ada peringkat
- Mathematics 06 00072Dokumen24 halamanMathematics 06 00072Yaschalw Sebsb BelayBelum ada peringkat
- Numerical Methods For Systems of Nonlinear Differential Functional EquationsDokumen14 halamanNumerical Methods For Systems of Nonlinear Differential Functional EquationsMaz AmininBelum ada peringkat
- ASGDDokumen18 halamanASGDRogério MainardesBelum ada peringkat
- Clavero-Jorge2017 Article AFractionalStepMethodFor2DParaDokumen18 halamanClavero-Jorge2017 Article AFractionalStepMethodFor2DParajoginder singhBelum ada peringkat
- Discret HamzaouiDokumen19 halamanDiscret HamzaouiPRED ROOMBelum ada peringkat
- Improved Delay-Dependent Robust Exponential Stabilization Criteria For Uncertain Time-Varying Delay Singular SystemsDokumen14 halamanImproved Delay-Dependent Robust Exponential Stabilization Criteria For Uncertain Time-Varying Delay Singular SystemsMoh IneBelum ada peringkat
- Classical Mechanics Notes Variational Principles and Lagrange EquationsDokumen11 halamanClassical Mechanics Notes Variational Principles and Lagrange EquationsBrennan MaceBelum ada peringkat
- Oscillation For A Second-Order Neutral Differential Equation With ImpulsesDokumen24 halamanOscillation For A Second-Order Neutral Differential Equation With Impulsesmanoel cristiano marreiro sampaioBelum ada peringkat
- Oscillation Theorems For Second-Order Nonhomogeneous Linear Differential EquationsDokumen4 halamanOscillation Theorems For Second-Order Nonhomogeneous Linear Differential Equationsiatrakisg8671Belum ada peringkat
- Evolutional Equations of Parabolic Type, Hiroki Tanabe, 1961Dokumen4 halamanEvolutional Equations of Parabolic Type, Hiroki Tanabe, 1961Fis MatBelum ada peringkat
- Om X On Invariant Minimal Hypersurfaces in R M NDokumen27 halamanOm X On Invariant Minimal Hypersurfaces in R M NIsaque CamposBelum ada peringkat
- Ring Theoretical Method of Calculating First Extension Groups of Certain Modules Over Certain RingDokumen8 halamanRing Theoretical Method of Calculating First Extension Groups of Certain Modules Over Certain Ringnoether2978Belum ada peringkat
- Adaptive Lecture04 2005Dokumen28 halamanAdaptive Lecture04 2005Cuter HsuBelum ada peringkat
- Lecture 1Dokumen5 halamanLecture 1johnte vokeBelum ada peringkat
- Linear ModelsDokumen35 halamanLinear ModelselmoreillyBelum ada peringkat
- Matheiu Function DocumentationDokumen23 halamanMatheiu Function DocumentationSabitabrata BanerjeeBelum ada peringkat
- Linearization Stability Definitions Simulation in Matlab/SimulinkDokumen39 halamanLinearization Stability Definitions Simulation in Matlab/SimulinkSachin ShendeBelum ada peringkat
- An Introduction To Averaging Method of Nonlinear VibrationDokumen7 halamanAn Introduction To Averaging Method of Nonlinear VibrationAmirBelum ada peringkat
- Math 462: HW2 Solutions: Due On July 25, 2014Dokumen7 halamanMath 462: HW2 Solutions: Due On July 25, 2014mjtbbhrmBelum ada peringkat
- (83645067) Cristian EcuaDokumen13 halaman(83645067) Cristian EcuaJohan Habid Orozco AraujoBelum ada peringkat
- A Spectral Approach To BandwidthDokumen19 halamanA Spectral Approach To Bandwidthforoud_makvandi1985Belum ada peringkat
- Noncom 1Dokumen5 halamanNoncom 1Pinaki RoyBelum ada peringkat
- Some Topological Properties of Revised Fuzzy....Dokumen10 halamanSome Topological Properties of Revised Fuzzy....GALLEGO LUPIANEZBelum ada peringkat
- Vectorized Matlab Codes For Linear Two-Dimensional ElasticityDokumen16 halamanVectorized Matlab Codes For Linear Two-Dimensional ElasticityVincent CucumazzøBelum ada peringkat
- Signal Sapce RepresentationDokumen41 halamanSignal Sapce RepresentationHarshitPalBelum ada peringkat
- Fixed Point and Weak Commuting MappingDokumen4 halamanFixed Point and Weak Commuting MappingInternational Journal of Research in Engineering and TechnologyBelum ada peringkat
- International Journal of Pure and Applied Mathematics No. 4 2013, 547-555Dokumen10 halamanInternational Journal of Pure and Applied Mathematics No. 4 2013, 547-555jawad HussainBelum ada peringkat
- Turgeman (Ub 1982)Dokumen20 halamanTurgeman (Ub 1982)Paramita BhattacharyaBelum ada peringkat
- Modeling of Atmospheric Wind Speed Sequence Using A Lognormal Continuous Stochastic EquationDokumen12 halamanModeling of Atmospheric Wind Speed Sequence Using A Lognormal Continuous Stochastic Equationufu_santosBelum ada peringkat
- On The Alternative Stability Criteria For Positive Systems: M. TwardyDokumen5 halamanOn The Alternative Stability Criteria For Positive Systems: M. TwardyKumar AmitBelum ada peringkat
- 2019 JC1 H2 Math (Promotion Exam) Eunoia Junior CollegeDokumen9 halaman2019 JC1 H2 Math (Promotion Exam) Eunoia Junior CollegeJASMINE STEPHANIE (TJC)Belum ada peringkat
- Differential-Equations 2 PDFDokumen8 halamanDifferential-Equations 2 PDFPhani KumarBelum ada peringkat
- Calculating The Inverse Z-TransformDokumen10 halamanCalculating The Inverse Z-TransformJPR EEEBelum ada peringkat
- 3a. WALLIS FORMULADokumen8 halaman3a. WALLIS FORMULAMildred Cardenas BañezBelum ada peringkat
- Algebra - Most Important Question Bank For JEE MainDokumen32 halamanAlgebra - Most Important Question Bank For JEE MainyyBelum ada peringkat
- Sample: !!CAUTION!! This Is Only A Sample PaperDokumen15 halamanSample: !!CAUTION!! This Is Only A Sample PaperDian Ayu UtamiBelum ada peringkat
- Article by Bill RobinsonDokumen25 halamanArticle by Bill RobinsonNeutronBelum ada peringkat
- Department of Information Technology: M.A.M. College of Engineering and TechnologyDokumen17 halamanDepartment of Information Technology: M.A.M. College of Engineering and TechnologyGanesh KumarBelum ada peringkat
- Iyanaga S. - Algebraic Number TheoryDokumen155 halamanIyanaga S. - Algebraic Number TheoryJohnnyBelum ada peringkat
- Tabla de IntegralesDokumen44 halamanTabla de IntegralesChristian QuitoBelum ada peringkat
- STS799Dokumen33 halamanSTS799rudin walterBelum ada peringkat
- Method of Undetermined Coefficients, Variation of Parameters, SuperpositionDokumen16 halamanMethod of Undetermined Coefficients, Variation of Parameters, SuperpositionKhyzer HayyatBelum ada peringkat
- Power Series Solution of A Differential EquationDokumen4 halamanPower Series Solution of A Differential EquationVijayPanchoreBelum ada peringkat
- Totally Convex AlgebrasDokumen31 halamanTotally Convex AlgebrasOmaguBelum ada peringkat
- Graph of Cubic Functions and Reciprocal FunctionsDokumen53 halamanGraph of Cubic Functions and Reciprocal FunctionsMark Vincent DoriaBelum ada peringkat
- A Finite Rotating Shaft Element Using Timoshenko Beam Theory PDFDokumen11 halamanA Finite Rotating Shaft Element Using Timoshenko Beam Theory PDFGuilherme Henrique100% (1)
- SF2521NPDE lecture2AKDokumen66 halamanSF2521NPDE lecture2AKBlooD LOVERBelum ada peringkat
- The Olympiad Algebra Book Vol I ComplemeDokumen349 halamanThe Olympiad Algebra Book Vol I Compleme046 SATYAM THAKKARBelum ada peringkat
- Graphing Linear InequalitiesDokumen4 halamanGraphing Linear InequalitiesShivamBelum ada peringkat
- Newton - Raphson MethodDokumen12 halamanNewton - Raphson MethodoBelum ada peringkat
- Math 116 Final Exam Study GuideDokumen5 halamanMath 116 Final Exam Study GuideLisa Melissa LakesBelum ada peringkat
- Bow Mathematics 7-10...Dokumen37 halamanBow Mathematics 7-10...era resusBelum ada peringkat
- Dingle Morgan0Dokumen17 halamanDingle Morgan0Ciprian ComanBelum ada peringkat
- Lecture 6Dokumen7 halamanLecture 6Milind BhatiaBelum ada peringkat
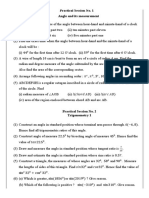
- 11th Prep - Maths-PracticalsDokumen15 halaman11th Prep - Maths-PracticalsSunny MallickBelum ada peringkat
- CosineDokumen10 halamanCosineSohaib AslamBelum ada peringkat
- Lecture 13 & 14Dokumen3 halamanLecture 13 & 14Vardaan TanejaBelum ada peringkat
- Lesson 6: Functions of One and More VariablesDokumen3 halamanLesson 6: Functions of One and More VariablesBotnaru LaurentiuBelum ada peringkat
- Matrices RotationsDokumen10 halamanMatrices RotationsBlackopsBelum ada peringkat
- MODULE - I Numerical MethodsDokumen3 halamanMODULE - I Numerical MethodsHarsha KasaragodBelum ada peringkat
- Summary of Noah Kagan's Million Dollar WeekendDari EverandSummary of Noah Kagan's Million Dollar WeekendPenilaian: 5 dari 5 bintang5/5 (2)
- High Road Leadership: Bringing People Together in a World That DividesDari EverandHigh Road Leadership: Bringing People Together in a World That DividesBelum ada peringkat
- $100M Offers: How to Make Offers So Good People Feel Stupid Saying NoDari Everand$100M Offers: How to Make Offers So Good People Feel Stupid Saying NoPenilaian: 5 dari 5 bintang5/5 (26)
- The Millionaire Fastlane, 10th Anniversary Edition: Crack the Code to Wealth and Live Rich for a LifetimeDari EverandThe Millionaire Fastlane, 10th Anniversary Edition: Crack the Code to Wealth and Live Rich for a LifetimePenilaian: 4.5 dari 5 bintang4.5/5 (91)
- The Coaching Habit: Say Less, Ask More & Change the Way You Lead ForeverDari EverandThe Coaching Habit: Say Less, Ask More & Change the Way You Lead ForeverPenilaian: 4.5 dari 5 bintang4.5/5 (186)
- Critical Thinking: How to Effectively Reason, Understand Irrationality, and Make Better DecisionsDari EverandCritical Thinking: How to Effectively Reason, Understand Irrationality, and Make Better DecisionsPenilaian: 4.5 dari 5 bintang4.5/5 (39)
- $100M Leads: How to Get Strangers to Want to Buy Your StuffDari Everand$100M Leads: How to Get Strangers to Want to Buy Your StuffPenilaian: 5 dari 5 bintang5/5 (19)
- Broken Money: Why Our Financial System Is Failing Us and How We Can Make It BetterDari EverandBroken Money: Why Our Financial System Is Failing Us and How We Can Make It BetterPenilaian: 5 dari 5 bintang5/5 (4)
- The Leader Habit: Master the Skills You Need to Lead--in Just Minutes a DayDari EverandThe Leader Habit: Master the Skills You Need to Lead--in Just Minutes a DayPenilaian: 4 dari 5 bintang4/5 (5)
- Summary of Thinking, Fast and Slow: by Daniel KahnemanDari EverandSummary of Thinking, Fast and Slow: by Daniel KahnemanPenilaian: 4 dari 5 bintang4/5 (117)
- Think and Grow Rich (1937 Edition): The Original 1937 Unedited EditionDari EverandThink and Grow Rich (1937 Edition): The Original 1937 Unedited EditionPenilaian: 5 dari 5 bintang5/5 (78)