Anda mungkin juga menyukai
- Apostila Controle - 21 - Avanço e AtrasoDokumen32 halamanApostila Controle - 21 - Avanço e Atrasolnery_1Belum ada peringkat
- Apostila Controle - 18 - Estabilidade Relativa (MG, MF)Dokumen26 halamanApostila Controle - 18 - Estabilidade Relativa (MG, MF)lnery_1Belum ada peringkat
- Apostila Controle - 17 - Análise de Estabilidade (Critério de Nyquist)Dokumen21 halamanApostila Controle - 17 - Análise de Estabilidade (Critério de Nyquist)lnery_1Belum ada peringkat
- Apostila Controle - 08 - Sensores e AtuadoresDokumen32 halamanApostila Controle - 08 - Sensores e Atuadoreslnery_1Belum ada peringkat
- Apostila Controle - 05 - Sistemas FluídicosDokumen44 halamanApostila Controle - 05 - Sistemas Fluídicoslnery_1100% (1)
- Apostila Controle - 03 - Função de Transferência e Diagrama de BlocosDokumen35 halamanApostila Controle - 03 - Função de Transferência e Diagrama de Blocoslnery_1Belum ada peringkat
- Apostila Controle - 02 - Transformada de LaplaceDokumen28 halamanApostila Controle - 02 - Transformada de Laplacelnery_1Belum ada peringkat
- Lista de Exercicios Aplicação de Derivadas e Integral + GabaritoDokumen5 halamanLista de Exercicios Aplicação de Derivadas e Integral + GabaritoL.GustavoBelum ada peringkat
- Funções TrigonométricasDokumen5 halamanFunções TrigonométricasGiovanna CrisostomoBelum ada peringkat
- Sinais e Sist 2Dokumen14 halamanSinais e Sist 2wilsonBelum ada peringkat
- Equação Segundo GrauDokumen7 halamanEquação Segundo GrauOtacilio LangBelum ada peringkat
- Algoritmo Scilab - Metodo de Gauss Seidel e Gauss JacobiDokumen15 halamanAlgoritmo Scilab - Metodo de Gauss Seidel e Gauss JacobiAndréBelum ada peringkat
- MAT6 T1 02 Decomposicao de Um Numero em Fatores PrimosDokumen3 halamanMAT6 T1 02 Decomposicao de Um Numero em Fatores PrimosMarianaSchiavonBelum ada peringkat
- Passo A Passo para Construção Do Gráfico Da Função Do Segundo Grau - Brasil Escola PDFDokumen6 halamanPasso A Passo para Construção Do Gráfico Da Função Do Segundo Grau - Brasil Escola PDFAdriana BemstarBelum ada peringkat
- Servo MecanismoDokumen216 halamanServo MecanismopedrocvspBelum ada peringkat
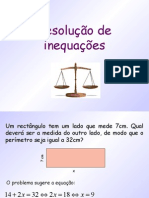
- Resolucao de InequacoesDokumen12 halamanResolucao de Inequacoesprojectocm100% (2)
- Beer Estática - Cap. 2Dokumen32 halamanBeer Estática - Cap. 2Miécio MelquiadesBelum ada peringkat
- MatematicaDokumen160 halamanMatematicaRoberto Fw WebberBelum ada peringkat
- Ficha Operações Com RadicaisDokumen5 halamanFicha Operações Com RadicaisnbeloBelum ada peringkat
- Trabalhode ElipseDokumen1 halamanTrabalhode ElipseConstantino CostaBelum ada peringkat
- 02 - Módulo de Matemática - Ministério Da Fazenda - Assistente Téc. Adm.Dokumen106 halaman02 - Módulo de Matemática - Ministério Da Fazenda - Assistente Téc. Adm.Juliana CavalcantiBelum ada peringkat
- PO I - Aula 5 - Resolução de Problemas de Programação Linear - Parte 2 - SimplexDokumen40 halamanPO I - Aula 5 - Resolução de Problemas de Programação Linear - Parte 2 - SimplexRocker3388 Inc.Belum ada peringkat
- KufiydDokumen4 halamanKufiydOliverCostaBelum ada peringkat
- Resolucao de Equacoes Diferenciais Por Redes NeuraDokumen10 halamanResolucao de Equacoes Diferenciais Por Redes NeuraJosemar Pereira da SilvaBelum ada peringkat
- Mypdf 20200119 PDFDokumen149 halamanMypdf 20200119 PDFEduarda DudaBelum ada peringkat
- Tarea N8 - ComprimidoDokumen9 halamanTarea N8 - ComprimidomiguelBelum ada peringkat
- Solucionario Elon Lages Vol. 2Dokumen9 halamanSolucionario Elon Lages Vol. 2Edwin Quispe CondoriBelum ada peringkat
- Notas de Topologia, MujicaDokumen110 halamanNotas de Topologia, MujicaRenan Maneli MezabarbaBelum ada peringkat
- RESUMO FUNÇÃO QUADRÁTICA (Parte 1)Dokumen4 halamanRESUMO FUNÇÃO QUADRÁTICA (Parte 1)Claudio JuniorBelum ada peringkat
- Lógica e Teoria Das CategoriasDokumen134 halamanLógica e Teoria Das CategoriasDenny JuniorBelum ada peringkat
- Passos Da MultiplicaçãoDokumen6 halamanPassos Da MultiplicaçãoAna Paula Machado100% (1)
- 3 Exercicios Potenciacao de Numeros Naturais 6 AnoDokumen3 halaman3 Exercicios Potenciacao de Numeros Naturais 6 AnoccandlejackkBelum ada peringkat
- Análise Combinatória e ProbabilidadeDokumen6 halamanAnálise Combinatória e ProbabilidadeSara CarvalhoBelum ada peringkat
- Matematica Intervenção 29 08 2018Dokumen2 halamanMatematica Intervenção 29 08 2018Glauber PinheiroBelum ada peringkat
- Segunda Lista de Introdução A ProgramaçãoDokumen19 halamanSegunda Lista de Introdução A ProgramaçãoLuizBelum ada peringkat
- Lista de Exercícios - Cálculo - 1Dokumen9 halamanLista de Exercícios - Cálculo - 1viniciusBelum ada peringkat