Anda mungkin juga menyukai
- Data IntegrationDokumen7 halamanData IntegrationHan MyoBelum ada peringkat
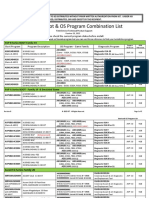
- Igt - Boot Os List Rev B 10-28-2015Dokumen5 halamanIgt - Boot Os List Rev B 10-28-2015Hector VillarrealBelum ada peringkat
- Marcel Breuer: Hungarian-American Designer, Architect and Bauhaus PioneerDokumen8 halamanMarcel Breuer: Hungarian-American Designer, Architect and Bauhaus PioneerYosaphat Kiko Paramore DiggoryBelum ada peringkat
- CRT Technical Data StructuresDokumen7 halamanCRT Technical Data Structureskark437Belum ada peringkat
- MS For The Access Control System Installation and TerminationDokumen21 halamanMS For The Access Control System Installation and Terminationwaaji snapBelum ada peringkat
- Financial Ratios ActivityDokumen3 halamanFinancial Ratios ActivityNCF- Student Assistants' OrganizationBelum ada peringkat
- Xu10j4 PDFDokumen80 halamanXu10j4 PDFPaulo Luiz França100% (1)
- Data Structures Lab Project: Implementation and Optimization of Some Lesser-Known BSTDokumen14 halamanData Structures Lab Project: Implementation and Optimization of Some Lesser-Known BSTShreyash RautelaBelum ada peringkat
- Practice Problems AnsDokumen16 halamanPractice Problems AnsSanskar SinghalBelum ada peringkat
- Avl Tree Research PaperDokumen7 halamanAvl Tree Research Papertug0l0byh1g2100% (1)
- About TreesDokumen19 halamanAbout TreesAkhilesh ChittoraBelum ada peringkat
- BST 3Dokumen16 halamanBST 3Tanya VermaBelum ada peringkat
- Data StructuresDokumen17 halamanData Structuresnaveen rajBelum ada peringkat
- Data Structures AptitudeDokumen80 halamanData Structures Aptituderavi_03dc13Belum ada peringkat
- Data Structure Interview Questions and Answers PDFDokumen7 halamanData Structure Interview Questions and Answers PDFramashankar1hBelum ada peringkat
- Dennis Shasha, Vladimir Lanin, Jeanette Schmidt (Shasha@nyu-Csd2.edu, Lanin@nyu-Csd2.edu, Schmidtj@nyu - Edu)Dokumen31 halamanDennis Shasha, Vladimir Lanin, Jeanette Schmidt (Shasha@nyu-Csd2.edu, Lanin@nyu-Csd2.edu, Schmidtj@nyu - Edu)Sunil SinghBelum ada peringkat
- Synopsis OF Term Paper: Course: CSE2050 (DATA STRUCTURES)Dokumen3 halamanSynopsis OF Term Paper: Course: CSE2050 (DATA STRUCTURES)Narinder BansalBelum ada peringkat
- 6 BSTs and AVL TreesDokumen12 halaman6 BSTs and AVL TreesJohn Martin EjercitadoBelum ada peringkat
- Dynamic Trees in Data Structure PDFDokumen6 halamanDynamic Trees in Data Structure PDFRASHMI DABREBelum ada peringkat
- Collision. When A Hash Function Maps Two Different Keys To The Same Table AddressDokumen13 halamanCollision. When A Hash Function Maps Two Different Keys To The Same Table Addresshiba khanBelum ada peringkat
- DS Question Bank SET-ADokumen8 halamanDS Question Bank SET-AMADHULIKA SHARMABelum ada peringkat
- Research Paper On Optimal Binary Search TreeDokumen7 halamanResearch Paper On Optimal Binary Search Treemgpwfubnd100% (1)
- TreesDokumen129 halamanTreessaisreeBelum ada peringkat
- Data Structure Questions BankDokumen30 halamanData Structure Questions BankRj SahooBelum ada peringkat
- Binary Tree TahsinDokumen14 halamanBinary Tree TahsinRojot SahaBelum ada peringkat
- Research Paper On Avl TreesDokumen6 halamanResearch Paper On Avl Treesjiyzzxplg100% (1)
- Comparison of Various Sorting Algorithms - A ReviewDokumen4 halamanComparison of Various Sorting Algorithms - A ReviewSagheer AhmedBelum ada peringkat
- Data Structure: Ta Structures AptitudeDokumen10 halamanData Structure: Ta Structures Aptitudesachininsomaniac43Belum ada peringkat
- 73 Ben-Haim Parallel Decision TreeDokumen4 halaman73 Ben-Haim Parallel Decision TreeajithakrishBelum ada peringkat
- AVL Tree: Self Balancing Binary Search TreeDokumen15 halamanAVL Tree: Self Balancing Binary Search TreeSayyid FatmiBelum ada peringkat
- TCS QuestionsDokumen5 halamanTCS QuestionsFann KannBelum ada peringkat
- Technical Question Bank: Computer ScienceDokumen14 halamanTechnical Question Bank: Computer ScienceUttam SinghBelum ada peringkat
- A2 Mca 101Dokumen6 halamanA2 Mca 101Ashok PahalBelum ada peringkat
- Simulation of Recursion and Data StructuresDokumen31 halamanSimulation of Recursion and Data StructuresVikas SonkarBelum ada peringkat
- Document Clustering in Web Search Engine: International Journal of Computer Trends and Technology-volume3Issue2 - 2012Dokumen4 halamanDocument Clustering in Web Search Engine: International Journal of Computer Trends and Technology-volume3Issue2 - 2012surendiran123Belum ada peringkat
- Daa Q&aDokumen8 halamanDaa Q&aAryan PrasadBelum ada peringkat
- Greenbst: Energy-E Cient Concurrent Search Tree: (Ibrahim - Umar, Otto - Anshus, Phuong - Hoai.Ha) @uit - NoDokumen16 halamanGreenbst: Energy-E Cient Concurrent Search Tree: (Ibrahim - Umar, Otto - Anshus, Phuong - Hoai.Ha) @uit - NowaaaaBelum ada peringkat
- University QuestionsDokumen29 halamanUniversity Questionssubham kumarBelum ada peringkat
- Machine Learning Aids Network Traffic Analysis and SlicingDokumen8 halamanMachine Learning Aids Network Traffic Analysis and SlicingTalha NaeemBelum ada peringkat
- Comprehensive Viva VoceDokumen168 halamanComprehensive Viva VoceDHANASEENUVASAN DBelum ada peringkat
- End Sem Prep - Course Summary - DSADokumen6 halamanEnd Sem Prep - Course Summary - DSAnandanjustinBelum ada peringkat
- Lab 11: Implementation of The BINARY SEARCH TREE Data Structure With The Help of AlgorithmsDokumen4 halamanLab 11: Implementation of The BINARY SEARCH TREE Data Structure With The Help of Algorithmshashir mahboobBelum ada peringkat
- Data Structures and Files Teachers' Laboratory ManualDokumen26 halamanData Structures and Files Teachers' Laboratory Manualgagan-randhava-8248Belum ada peringkat
- A Versatile Genetic Algorithm For Network PlanningDokumen7 halamanA Versatile Genetic Algorithm For Network PlanningquocnknetBelum ada peringkat
- UntitledDokumen72 halamanUntitledrohanBelum ada peringkat
- M4 Dsa NotesDokumen24 halamanM4 Dsa NotesMadhukesh .kBelum ada peringkat
- Online Mining of Data To Generate Association Rule Mining in Large DatabasesDokumen6 halamanOnline Mining of Data To Generate Association Rule Mining in Large Databasessravya_373771414Belum ada peringkat
- Data Structure AucseDokumen10 halamanData Structure AucseJagannath SathwikBelum ada peringkat
- Mining Association Rules with Systolic TreesDokumen6 halamanMining Association Rules with Systolic TreesKurumeti Naga Surya Lakshmana KumarBelum ada peringkat
- Using Top Trees For Easy Programming of Tree AlgorithmsDokumen12 halamanUsing Top Trees For Easy Programming of Tree AlgorithmsnothardBelum ada peringkat
- Data Structure Theoretical ApproachDokumen6 halamanData Structure Theoretical ApproachEditor IJTSRDBelum ada peringkat
- Guide to Data Structure QuestionsDokumen11 halamanGuide to Data Structure QuestionsMd. EmdadBelum ada peringkat
- Data StructureDokumen10 halamanData Structurebalashivashree9593Belum ada peringkat
- Data Structure AucseDokumen10 halamanData Structure AucseyogeshdxtBelum ada peringkat
- Data StructuresDokumen8 halamanData StructuresJordi WestBelum ada peringkat
- A Fast Method for Accessing Nodes in Binary Search TreesDokumen8 halamanA Fast Method for Accessing Nodes in Binary Search TreesirinarmBelum ada peringkat
- Data Structures AptitudeDokumen3 halamanData Structures AptitudeNeema JoseBelum ada peringkat
- AlgorithmsDokumen23 halamanAlgorithmsUsman MalikBelum ada peringkat
- Assignment 2Dokumen17 halamanAssignment 2ManavBelum ada peringkat
- TCS and InfosysDokumen5 halamanTCS and InfosysAmanpreet 2003052Belum ada peringkat
- Folic AcidDokumen5 halamanFolic Acidjyoti singhBelum ada peringkat
- Piroxicam (Wikipedia)Dokumen4 halamanPiroxicam (Wikipedia)Adrian ArnasaputraBelum ada peringkat
- G C Reddy ProfileDokumen3 halamanG C Reddy ProfileG.C.ReddyBelum ada peringkat
- Lfa Sop 00067Dokumen6 halamanLfa Sop 00067Ahmed IsmaillBelum ada peringkat
- Routine E-Mail Messages and Memos-Ch 8Dokumen43 halamanRoutine E-Mail Messages and Memos-Ch 8Faryal ArifBelum ada peringkat
- MU0017 Talent ManagementDokumen12 halamanMU0017 Talent ManagementDr. Smita ChoudharyBelum ada peringkat
- G.R. No. 175350 June 13, 2012 Equitable Banking Corporation, Inc. Petitioner, Special Steel Products, and Augusto L. Pardo, RespondentsDokumen8 halamanG.R. No. 175350 June 13, 2012 Equitable Banking Corporation, Inc. Petitioner, Special Steel Products, and Augusto L. Pardo, RespondentsHp AmpsBelum ada peringkat
- Keystone - Contractors - Book 16 05 12 FinalDokumen9 halamanKeystone - Contractors - Book 16 05 12 Finalfb8120Belum ada peringkat
- EasementDokumen10 halamanEasementEik Ren OngBelum ada peringkat
- Education, A Vital Principle For Digital Library Development in IranDokumen23 halamanEducation, A Vital Principle For Digital Library Development in Iranrasuli9Belum ada peringkat
- Project CST 383Dokumen1.083 halamanProject CST 383api-668525404Belum ada peringkat
- Priceliost Ecatalog 2021 Div. DiagnosticDokumen2 halamanPriceliost Ecatalog 2021 Div. Diagnosticwawan1010Belum ada peringkat
- Introduction Electrical MotorDokumen36 halamanIntroduction Electrical MotorYajidBelum ada peringkat
- Paulson 2007 Year End Report Earns Nearly 600Dokumen16 halamanPaulson 2007 Year End Report Earns Nearly 600Tunaljit ChoudhuryBelum ada peringkat
- Company BackgroundDokumen17 halamanCompany Backgroundzayna faizaBelum ada peringkat
- Mr. Arshad Nazer: Bawshar, Sultanate of OmanDokumen2 halamanMr. Arshad Nazer: Bawshar, Sultanate of OmanTop GBelum ada peringkat
- 05 Executive SummaryDokumen2 halaman05 Executive SummaryHanumanth T Raj YashuBelum ada peringkat
- MATLAB code for Mann–Kendall test and Sen's slope estimationDokumen7 halamanMATLAB code for Mann–Kendall test and Sen's slope estimationTubaiNandiBelum ada peringkat
- What is a Server ClusterDokumen2 halamanWhat is a Server Clusterfikru tesefayeBelum ada peringkat
- Research Paper About Cebu PacificDokumen8 halamanResearch Paper About Cebu Pacificwqbdxbvkg100% (1)
- Case Study ON: The Spark Batteries LTDDokumen8 halamanCase Study ON: The Spark Batteries LTDRitam chaturvediBelum ada peringkat
- Frito LaysDokumen6 halamanFrito LaysElcamino Torrez50% (2)
- Holmes 1993Dokumen8 halamanHolmes 1993Rumaisa KrubaBelum ada peringkat
- CLS1Dokumen3 halamanCLS1Shaina Kaye De GuzmanBelum ada peringkat