Anda mungkin juga menyukai
- New Sensorless Commutation Technique For Brushless DC MotorsDokumen10 halamanNew Sensorless Commutation Technique For Brushless DC MotorsUmai BalanBelum ada peringkat
- Dynamic Spectrum Allocation in Wireless Cognitive Sensor Networks: Improving Fairness and Energy EfficiencyDokumen5 halamanDynamic Spectrum Allocation in Wireless Cognitive Sensor Networks: Improving Fairness and Energy EfficiencyUmai BalanBelum ada peringkat
- 04153344Dokumen6 halaman04153344Umai BalanBelum ada peringkat
- Power Management Solutions For Energy Management, Power Quality and Environment Using Battery Energy Storage SystemsDokumen1 halamanPower Management Solutions For Energy Management, Power Quality and Environment Using Battery Energy Storage SystemsUmai BalanBelum ada peringkat
- A Self Adaptable Intelligent Battery Charger For Portable ElectronicsDokumen5 halamanA Self Adaptable Intelligent Battery Charger For Portable ElectronicsUmai BalanBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- CCFL - Precautions and Procedures For Accurate Voltage MeasurementsDokumen1 halamanCCFL - Precautions and Procedures For Accurate Voltage MeasurementsSicoe VasileBelum ada peringkat
- Uniquefire Catalog Chapter 09Dokumen4 halamanUniquefire Catalog Chapter 09Lee WenjianBelum ada peringkat
- Medium Voltage Switchgear Room DesignDokumen3 halamanMedium Voltage Switchgear Room DesignSunil ParikhBelum ada peringkat
- Adb Wind ConeDokumen4 halamanAdb Wind ConeSulistyo WidodoBelum ada peringkat
- Bioentry W: Installation GuideDokumen20 halamanBioentry W: Installation GuidePaul CuevaBelum ada peringkat
- Mag B760M Mortar Max Wifi DDR4Dokumen1 halamanMag B760M Mortar Max Wifi DDR4Taewhan JungBelum ada peringkat
- RealmctubeDokumen15 halamanRealmctubeToM100% (6)
- Catalogue of Insulator and Surge Arrester - Orient ChinaDokumen66 halamanCatalogue of Insulator and Surge Arrester - Orient Chinapham thang0% (1)
- 10 III March 2022Dokumen6 halaman10 III March 2022Rehana TahasildarBelum ada peringkat
- Experiment 1 SCRDokumen23 halamanExperiment 1 SCREmry MenezBelum ada peringkat
- Terex Digger Derrick Operators Manual 6Dokumen20 halamanTerex Digger Derrick Operators Manual 6Israel SotoBelum ada peringkat
- MERCURY 30 40 HP Instruktsiya Po Zamene Svechey Zazhiganiya I Rem - Komplekta Pompy Sistemy OhlazhdeniyaDokumen4 halamanMERCURY 30 40 HP Instruktsiya Po Zamene Svechey Zazhiganiya I Rem - Komplekta Pompy Sistemy OhlazhdeniyaScott BakerBelum ada peringkat
- Drawings 04272017Dokumen118 halamanDrawings 04272017Robert TirtaBelum ada peringkat
- 977205PDokumen49 halaman977205PChu QuynhBelum ada peringkat
- DL PU酗尸: Products Ma■UalDokumen24 halamanDL PU酗尸: Products Ma■UalMahmoudBelum ada peringkat
- Running Casing With Weatherford Overdrive System - Best PracticesDokumen1 halamanRunning Casing With Weatherford Overdrive System - Best PracticesYougchu LuanBelum ada peringkat
- BinMaster SensorsDokumen10 halamanBinMaster SensorsdarkpilotBelum ada peringkat
- DEMO LESSON PLAN - Electric Motor&GeneratorDokumen9 halamanDEMO LESSON PLAN - Electric Motor&Generatormary graceBelum ada peringkat
- Chieftec Aps 650cbDokumen26 halamanChieftec Aps 650cbbatamazurBelum ada peringkat
- CableCALC BS 7671 Operating ManualDokumen17 halamanCableCALC BS 7671 Operating Manualjodie_patrickBelum ada peringkat
- XL4015Dokumen9 halamanXL4015Jose M PeresBelum ada peringkat
- Defence Engine: 261-336 KW (350-450 HP) 1491-1850 NM (1100-1364 LB-FT)Dokumen2 halamanDefence Engine: 261-336 KW (350-450 HP) 1491-1850 NM (1100-1364 LB-FT)Aamir ArainBelum ada peringkat
- Group 1 - JFET - NSESP 2021Dokumen16 halamanGroup 1 - JFET - NSESP 2021Sisilia Anabina TariganBelum ada peringkat
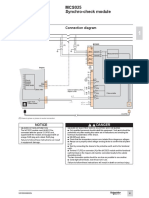
- MCS025 Synchro-Check Module: InstallationDokumen1 halamanMCS025 Synchro-Check Module: Installationوسام وسامBelum ada peringkat
- Service Manual Vox VT40+Dokumen16 halamanService Manual Vox VT40+Marco Antonio Chaparro Acosta100% (2)
- HE800DIQ716CDokumen8 halamanHE800DIQ716CRicardo NunesBelum ada peringkat
- Minutes Bucket Elevator Teleconference October 5 2012Dokumen6 halamanMinutes Bucket Elevator Teleconference October 5 2012Vinod Kumar VermaBelum ada peringkat
- Upmo, Ovcpd Uplb: The Electrical Services SectionDokumen24 halamanUpmo, Ovcpd Uplb: The Electrical Services SectionMickiee OracionBelum ada peringkat
- X1313EX13AX13AFDokumen16 halamanX1313EX13AX13AFCarlos Castillo Urrunaga100% (1)
- Yaskawa SGDB ManualDokumen652 halamanYaskawa SGDB ManualMichael KennaBelum ada peringkat