Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Sample Valuation ReportDokumen15 halamanSample Valuation Reportayush singlaBelum ada peringkat
- Intergard 475HS - Part B - EVA046 - GBR - ENG PDFDokumen10 halamanIntergard 475HS - Part B - EVA046 - GBR - ENG PDFMohamed NouzerBelum ada peringkat
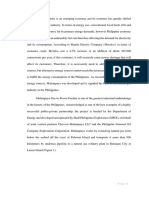
- Malampaya Case StudyDokumen15 halamanMalampaya Case StudyMark Kenneth ValerioBelum ada peringkat
- BBO2020Dokumen41 halamanBBO2020qiuBelum ada peringkat
- NIFT GAT Sample Test Paper 1Dokumen13 halamanNIFT GAT Sample Test Paper 1goelBelum ada peringkat
- Cs205-E S3dec18 KtuwebDokumen2 halamanCs205-E S3dec18 KtuwebVighnesh MuralyBelum ada peringkat
- Fh84fr6ht GBR EngDokumen6 halamanFh84fr6ht GBR EngEsmir ŠkreboBelum ada peringkat
- 07 EPANET Tutorial-SlidesDokumen26 halaman07 EPANET Tutorial-SlidesTarhata Kalim100% (1)
- Basic Knowledge About WDM Principle ADokumen92 halamanBasic Knowledge About WDM Principle AJosé LópezBelum ada peringkat
- PrimerCube Manufacturing GuideDokumen57 halamanPrimerCube Manufacturing GuideTinaMaleenaBelum ada peringkat
- Matokeo CBDokumen4 halamanMatokeo CBHubert MubofuBelum ada peringkat
- RIBA PoWUpdate 131009 ProbynMiersDokumen28 halamanRIBA PoWUpdate 131009 ProbynMiersYellowLightBelum ada peringkat
- Daily Plankton Agrabinta CianjurDokumen141 halamanDaily Plankton Agrabinta CianjurPutra Cahya GemilangBelum ada peringkat
- Cuentos CADEDokumen6 halamanCuentos CADEMäuricio E. González VegaBelum ada peringkat
- Advanced Methods For Complex Network AnalysisDokumen2 halamanAdvanced Methods For Complex Network AnalysisCS & ITBelum ada peringkat
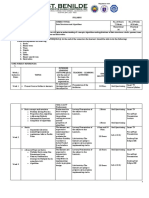
- Lupon National Comprehensive High School Ilangay, Lupon, Davao Oriental Grade 10-Household ServicesDokumen4 halamanLupon National Comprehensive High School Ilangay, Lupon, Davao Oriental Grade 10-Household ServicesJohn Eirhene Intia BarreteBelum ada peringkat
- Useful Methods in CatiaDokumen30 halamanUseful Methods in CatiaNastase Corina100% (2)
- Data Structures and Algorithms SyllabusDokumen9 halamanData Structures and Algorithms SyllabusBongbong GalloBelum ada peringkat
- Business OrganizationDokumen32 halamanBusiness OrganizationSaugandh GambhirBelum ada peringkat
- M.T Nautica Batu Pahat: Clean Product Tanker 4,497 BHPDokumen1 halamanM.T Nautica Batu Pahat: Clean Product Tanker 4,497 BHPSuper 247Belum ada peringkat
- ERBS UPDATE John Doe ProceedingDokumen3 halamanERBS UPDATE John Doe ProceedingtpeppermanBelum ada peringkat
- A Sample Script For Public SpeakingDokumen2 halamanA Sample Script For Public Speakingalmasodi100% (2)
- T10 - PointersDokumen3 halamanT10 - PointersGlory of Billy's Empire Jorton KnightBelum ada peringkat
- Letter Writing: An Informative Powerpoint About LetterDokumen11 halamanLetter Writing: An Informative Powerpoint About LetterMalik KamranBelum ada peringkat
- 1000 KilosDokumen20 halaman1000 KilosAbdullah hayreddinBelum ada peringkat
- Acronyms and AbbreviationsDokumen875 halamanAcronyms and AbbreviationsLacky KrishnanBelum ada peringkat
- Business Plan - A TeahouseDokumen6 halamanBusiness Plan - A TeahouseJoe DBelum ada peringkat
- 1Z0-061 Sample Questions AnswersDokumen6 halaman1Z0-061 Sample Questions AnswersLaura JohnstonBelum ada peringkat
- Overview of Incorporation in CambodiaDokumen3 halamanOverview of Incorporation in CambodiaDavid MBelum ada peringkat
- Discover It For StudentsDokumen1 halamanDiscover It For StudentsVinod ChintalapudiBelum ada peringkat