Anda mungkin juga menyukai
- Cisco Introduction To Cyber Security Chap-2Dokumen9 halamanCisco Introduction To Cyber Security Chap-2MukeshBelum ada peringkat
- C One Mark QuestionsDokumen17 halamanC One Mark QuestionsNithiya NithiBelum ada peringkat
- Servlets NotesDokumen18 halamanServlets NotesMukesh100% (8)
- Chapter Six: Network Optimization ProblemsDokumen38 halamanChapter Six: Network Optimization ProblemsK59 Tran Gia KhanhBelum ada peringkat
- Cisco Introduction To Cyber Security Chap-4Dokumen9 halamanCisco Introduction To Cyber Security Chap-4MukeshBelum ada peringkat
- Operating Systems: Files Concept & Implementing File SystemsDokumen27 halamanOperating Systems: Files Concept & Implementing File SystemsMukesh88% (48)
- Visual Programming NotesDokumen0 halamanVisual Programming NotesSamuel VictorBelum ada peringkat
- AI Artificial Intelligence Unit 1 IntroductionDokumen91 halamanAI Artificial Intelligence Unit 1 IntroductionArun Raj SankarBelum ada peringkat
- Assymetric Cryptography, Kerberos, X.509 CertificatesDokumen34 halamanAssymetric Cryptography, Kerberos, X.509 CertificatesMukesh80% (5)
- Subject: PRF192-PFC Workshop 01 Student Code: SE160503 Full Name: Trần Mạnh HùngDokumen5 halamanSubject: PRF192-PFC Workshop 01 Student Code: SE160503 Full Name: Trần Mạnh HùngTran Manh Hung (K16HCM)Belum ada peringkat
- Multimedia LabDokumen4 halamanMultimedia LabVikram Rao50% (2)
- MC (Unit-7) MANET'sDokumen23 halamanMC (Unit-7) MANET'sMukesh93% (42)
- Cs 404 Coa Unit II Computer ArithmeticDokumen31 halamanCs 404 Coa Unit II Computer Arithmeticmanali100% (5)
- Lecture Notes on Design and Analysis of AlgorithmsDokumen98 halamanLecture Notes on Design and Analysis of Algorithmssobharani neelam100% (1)
- JSP NotesDokumen35 halamanJSP NotesMukesh71% (14)
- Ad3301 Data Exploration and VisualizationDokumen30 halamanAd3301 Data Exploration and VisualizationShamilie MBelum ada peringkat
- Unit 3:-Abstraction and VirtualizationDokumen31 halamanUnit 3:-Abstraction and VirtualizationAnonymous FKWVgNnSjo100% (2)
- AiDokumen82 halamanAiPhani KumarBelum ada peringkat
- Cisco Introduction To Cyber Security Chap-1Dokumen9 halamanCisco Introduction To Cyber Security Chap-1Mukesh80% (5)
- Introduction to Machine Learning FundamentalsDokumen112 halamanIntroduction to Machine Learning FundamentalsAanchal Padmavat100% (4)
- Seminar PPT (Minimax Algorithm)Dokumen35 halamanSeminar PPT (Minimax Algorithm)Ashish Sabade100% (1)
- Multicasting and Multicast ProtocolsDokumen50 halamanMulticasting and Multicast ProtocolsMukeshBelum ada peringkat
- Data Mining and Visualization Question BankDokumen11 halamanData Mining and Visualization Question Bankghost100% (1)
- Symmetric Encryption, DES, AES, MAC, Hash Algorithms, HMACDokumen76 halamanSymmetric Encryption, DES, AES, MAC, Hash Algorithms, HMACMukesh86% (7)
- Multimedia & Animation-CCS352 - CAT-1 Questions With Answer KeysDokumen12 halamanMultimedia & Animation-CCS352 - CAT-1 Questions With Answer Keysragavaharish463100% (1)
- Transport Layer - MukeshDokumen54 halamanTransport Layer - MukeshMukeshBelum ada peringkat
- Unicast Routing Protocols - RIP, OSPF and BGPDokumen48 halamanUnicast Routing Protocols - RIP, OSPF and BGPMukesh100% (1)
- Algorithm Psudo Code For Scheduling Algorithm PDFDokumen7 halamanAlgorithm Psudo Code For Scheduling Algorithm PDFsankrajegowdaBelum ada peringkat
- OS Process Synchronization, DeadlocksDokumen30 halamanOS Process Synchronization, DeadlocksMukesh100% (4)
- AI exam questions and answersDokumen24 halamanAI exam questions and answersrajesh199155100% (1)
- Artificial Intelligence Unit-1 Introduction and Intelligent AgentsDokumen16 halamanArtificial Intelligence Unit-1 Introduction and Intelligent AgentsMukesh100% (1)
- Problem Formulation & Solving by SearchDokumen37 halamanProblem Formulation & Solving by SearchtauraiBelum ada peringkat
- Question Bank - Unit 1Dokumen5 halamanQuestion Bank - Unit 1Saloni DalalBelum ada peringkat
- MCES-21CS43 Module-1 NotesDokumen14 halamanMCES-21CS43 Module-1 NotesEdu techBelum ada peringkat
- Chapter3 Solving Problems by Searching and Constraint Satisfaction ProblemDokumen43 halamanChapter3 Solving Problems by Searching and Constraint Satisfaction ProblemRinesh SahadevanBelum ada peringkat
- 21CS482 Unix Shell ProgrammingDokumen3 halaman21CS482 Unix Shell ProgrammingNikhil chand100% (1)
- AI - Unit I QBDokumen1 halamanAI - Unit I QBNarendran MuthusamyBelum ada peringkat
- Specialized Process Models: Muhammad NomanDokumen20 halamanSpecialized Process Models: Muhammad NomanMohammad NomanBelum ada peringkat
- Laboratory Manual: Object Oriented Software EngineeringDokumen58 halamanLaboratory Manual: Object Oriented Software Engineeringrsingh1987Belum ada peringkat
- AI Question BankDokumen19 halamanAI Question BankKarthikeyan SelvaBelum ada peringkat
- UCS303 OS LAB QUIZ SOLUTIONSDokumen8 halamanUCS303 OS LAB QUIZ SOLUTIONSadBelum ada peringkat
- OOAD Model Paper 20-03-2023Dokumen6 halamanOOAD Model Paper 20-03-2023balakailasaBelum ada peringkat
- Anatomy of A MapReduce JobDokumen5 halamanAnatomy of A MapReduce JobkumarBelum ada peringkat
- Cs6559 Ai Notes RejinpaulDokumen150 halamanCs6559 Ai Notes RejinpaulstalinBelum ada peringkat
- Advanced Data Structures NotesDokumen142 halamanAdvanced Data Structures NotesChinkal Nagpal100% (2)
- Artificial Intelligence Unit-4 First Order LogicDokumen11 halamanArtificial Intelligence Unit-4 First Order LogicMukesh100% (2)
- Staffing in Software ProjectsDokumen26 halamanStaffing in Software Projectsabhishekgs100% (3)
- Question Paper Code: X10326: Computer Science and EngineeringDokumen2 halamanQuestion Paper Code: X10326: Computer Science and EngineeringSamraj JebasinghBelum ada peringkat
- DSBDA ORAL Question BankDokumen6 halamanDSBDA ORAL Question BankSUnny100% (1)
- DBMS HISTORICAL PERSPECTIVEDokumen30 halamanDBMS HISTORICAL PERSPECTIVERavindran Kumar N100% (1)
- EC6018 MULTIMEDIA COMPRESSION AND COMMUNICATION Question BankDokumen28 halamanEC6018 MULTIMEDIA COMPRESSION AND COMMUNICATION Question BankbalabaskerBelum ada peringkat
- AI Unit GuideDokumen40 halamanAI Unit GuideTushar JainBelum ada peringkat
- Software Testing Lab Manual 2Dokumen46 halamanSoftware Testing Lab Manual 2Arya Raju100% (2)
- Gold Price Prediction Using Ensemble Based Supervised Machine LearningDokumen30 halamanGold Price Prediction Using Ensemble Based Supervised Machine LearningSai Teja deevela100% (1)
- Bda MCQDokumen44 halamanBda MCQSalman Shaikh100% (1)
- SOLUTION - SE-I Quiz - Chapter 1-3 - UploadedDokumen4 halamanSOLUTION - SE-I Quiz - Chapter 1-3 - UploadedUmer Shiekh67% (3)
- Unix and Shell ProgrammingDokumen50 halamanUnix and Shell ProgrammingAnupam Ghosh100% (1)
- DAA Unit Wise Importtant QuestionsDokumen2 halamanDAA Unit Wise Importtant QuestionsAditya Krishna100% (4)
- OOAD Notes PDFDokumen92 halamanOOAD Notes PDFSherril Vincent100% (2)
- Hadoop Fundamentals Quiz with AnswersDokumen10 halamanHadoop Fundamentals Quiz with AnswersGursimran Singh GorayaBelum ada peringkat
- AI Practical 05-Greedy Best First Search ImplementationDokumen19 halamanAI Practical 05-Greedy Best First Search ImplementationhokBelum ada peringkat
- BCA Sem V - UnixDokumen14 halamanBCA Sem V - Unixshri_dasari0% (1)
- Important Problem TypesDokumen2 halamanImportant Problem TypesSahila Devi50% (2)
- ONLINE SEARCH AGENTS EXAMINEDDokumen13 halamanONLINE SEARCH AGENTS EXAMINEDHari Deivasigamani100% (1)
- Learning 17 TypesDokumen30 halamanLearning 17 TypesRupinder AulakhBelum ada peringkat
- Ec 1009 - Digital Image ProcessingDokumen30 halamanEc 1009 - Digital Image Processingainugiri75% (4)
- OS MCQ Set 1Dokumen4 halamanOS MCQ Set 1Sudhanshu SinghBelum ada peringkat
- ETI Notes For 1st Unit AI (Artificial Intelligence)Dokumen11 halamanETI Notes For 1st Unit AI (Artificial Intelligence)Chhota PanditBelum ada peringkat
- 3.operating Systems Lab 1Dokumen69 halaman3.operating Systems Lab 1Vive Kowsal Yaniss100% (1)
- Distributed Computing Question PaperDokumen2 halamanDistributed Computing Question Paperatul211988Belum ada peringkat
- Image and Video AnalyticsDokumen3 halamanImage and Video AnalyticsJetlin C PBelum ada peringkat
- Artificial Intelligence Introduction and Problem SolvingDokumen44 halamanArtificial Intelligence Introduction and Problem Solvingddteo100% (1)
- Artificial Intelligence Unit 2 Solving Problems by SearchingDokumen11 halamanArtificial Intelligence Unit 2 Solving Problems by SearchingAnanth NathBelum ada peringkat
- Module 3. Solving Problems by Searching - 20230824 - 200318 - 0000Dokumen15 halamanModule 3. Solving Problems by Searching - 20230824 - 200318 - 0000afrozbhati1111Belum ada peringkat
- Ai NotesDokumen13 halamanAi NotesHitesh MahiBelum ada peringkat
- Introduction To Networks - CCNAv7 Module-1Dokumen42 halamanIntroduction To Networks - CCNAv7 Module-1Mukesh0% (1)
- Basic Router and Switch Configuration - CCNAv7 Module 2Dokumen36 halamanBasic Router and Switch Configuration - CCNAv7 Module 2MukeshBelum ada peringkat
- Deadlocks in Operating SystemsDokumen37 halamanDeadlocks in Operating SystemsMukeshBelum ada peringkat
- Protocols and Reference Models - CCNAv7-1Dokumen41 halamanProtocols and Reference Models - CCNAv7-1MukeshBelum ada peringkat
- Next Generation IP - IPv6Dokumen46 halamanNext Generation IP - IPv6Mukesh100% (1)
- Multimedia Data and ProtocolsDokumen59 halamanMultimedia Data and ProtocolsMukesh100% (1)
- Quality of ServiceDokumen40 halamanQuality of ServiceMukeshBelum ada peringkat
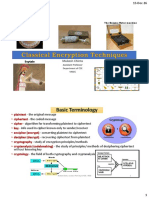
- Classsical Encryption Techniques MukeshDokumen13 halamanClasssical Encryption Techniques MukeshMukeshBelum ada peringkat
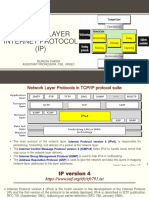
- Network Layer - IP - MukeshDokumen19 halamanNetwork Layer - IP - MukeshMukesh100% (2)
- Introduction To SecurityDokumen37 halamanIntroduction To SecurityMukeshBelum ada peringkat
- Operating Systems - DeadlocksDokumen14 halamanOperating Systems - DeadlocksMukesh100% (3)
- Unicast Routing - MukeshDokumen29 halamanUnicast Routing - MukeshMukeshBelum ada peringkat
- Bluetooth, IEEE 802.11, WIMAXDokumen30 halamanBluetooth, IEEE 802.11, WIMAXMukesh71% (7)
- Introduction To Networks, Reference ModelsDokumen38 halamanIntroduction To Networks, Reference ModelsMukesh100% (2)
- MVC & Struts NotesDokumen6 halamanMVC & Struts NotesMukesh100% (1)
- Database Issues in Mobile ComputingDokumen20 halamanDatabase Issues in Mobile ComputingMukesh90% (51)
- Trusted Systems, Firewalls, Intrusion Detection SystemsDokumen18 halamanTrusted Systems, Firewalls, Intrusion Detection SystemsMukesh100% (34)
- ch03 Brute ForceDokumen67 halamanch03 Brute ForceAmro AbosaifBelum ada peringkat
- Chapter 4 TreesDokumen47 halamanChapter 4 TreesLogaNathan BalasuBaramaniamBelum ada peringkat
- Exercises INF 5860: Linear regression, logistic classification, neural networksDokumen11 halamanExercises INF 5860: Linear regression, logistic classification, neural networksPatrick O'RourkeBelum ada peringkat
- Ontap CDokumen16 halamanOntap CMinh ThuậnBelum ada peringkat
- IT6502 NotesDokumen145 halamanIT6502 NotesDinesh Kumar GhilliBelum ada peringkat
- TRIAL MODE: Practice Exercises Activity 1: Understanding One-To-One FunctionsDokumen9 halamanTRIAL MODE: Practice Exercises Activity 1: Understanding One-To-One FunctionselleeBelum ada peringkat
- Algorithms 20130703 PDFDokumen53 halamanAlgorithms 20130703 PDFajnekoBelum ada peringkat
- Functional Light v3Dokumen188 halamanFunctional Light v3jowkeBelum ada peringkat
- Coding Month From ARC: This Competition Is Divided Into 3 Rounds As FollowsDokumen3 halamanCoding Month From ARC: This Competition Is Divided Into 3 Rounds As FollowsSagar kumarBelum ada peringkat
- Dynamic Programming - Set 8 (Matrix Chain Multiplication) - GeeksforGeeks - GeeksforGeeks1Dokumen12 halamanDynamic Programming - Set 8 (Matrix Chain Multiplication) - GeeksforGeeks - GeeksforGeeks1Saagar MinochaBelum ada peringkat
- 1 Preliminaries: K J 1 2 K JDokumen8 halaman1 Preliminaries: K J 1 2 K JSiraj Ud-DoullaBelum ada peringkat
- Week 5Dokumen41 halamanWeek 5유지Belum ada peringkat
- VHDL FSM UNIT 5 ET&T 7th SemDokumen22 halamanVHDL FSM UNIT 5 ET&T 7th SemDEEPA KUNWARBelum ada peringkat
- FCFS (First Come First Serve) CPU SchedulingDokumen3 halamanFCFS (First Come First Serve) CPU SchedulingBiju AngaleesBelum ada peringkat
- Maths Mphil ProjectDokumen80 halamanMaths Mphil ProjectBalaji Rao N84% (62)
- Algorithm ComplexityDokumen6 halamanAlgorithm ComplexityMalhar AnjariaBelum ada peringkat
- Cost Parametric Analysis of Linear Programming Problems With Fuzzy Cost Coefficients Based On Ranking FunctionsDokumen30 halamanCost Parametric Analysis of Linear Programming Problems With Fuzzy Cost Coefficients Based On Ranking FunctionsUla Himatul AliyahBelum ada peringkat
- Lec.2 - COMM 552 Information Theory and CodingDokumen35 halamanLec.2 - COMM 552 Information Theory and CodingDonia Mohammed AbdeenBelum ada peringkat
- Analysis and Design of Algorithm (ADA) : Module-1Dokumen23 halamanAnalysis and Design of Algorithm (ADA) : Module-1Nitish SolankiBelum ada peringkat
- Increment-Dimensional Heuristic Search For Intelligent Vehicle Motion PlanningDokumen2 halamanIncrement-Dimensional Heuristic Search For Intelligent Vehicle Motion PlanningGuadalupe CuascotaBelum ada peringkat
- Data Structures exam questionsDokumen2 halamanData Structures exam questionsDev RathoreBelum ada peringkat
- Arithmetic OperatorsDokumen15 halamanArithmetic OperatorsTushar MudgalBelum ada peringkat
- Hiroyuki-Kasai - NMFLibrary - MATLAB Library For Non-Negative Matrix Factorization (NMF) - Version 1.8.0Dokumen9 halamanHiroyuki-Kasai - NMFLibrary - MATLAB Library For Non-Negative Matrix Factorization (NMF) - Version 1.8.0bhaskarbrvBelum ada peringkat
- PCD Lab ManualDokumen47 halamanPCD Lab ManualKande Archana KBelum ada peringkat
- Recursive algorithmsDokumen6 halamanRecursive algorithmsRaheel AhmadBelum ada peringkat
- Algorithm Correctness and Time ComplexityDokumen36 halamanAlgorithm Correctness and Time Complexityfor_booksBelum ada peringkat
- State Space Search Lecture # 2Dokumen34 halamanState Space Search Lecture # 2nazim aliBelum ada peringkat
- GE3151 Problem Solving and Python Programming Lecture Notes 1Dokumen129 halamanGE3151 Problem Solving and Python Programming Lecture Notes 1nandhini.raj2930Belum ada peringkat