Anda mungkin juga menyukai
- Empresa - Check List Documentacion Legal Empresa PrevencionDokumen1 halamanEmpresa - Check List Documentacion Legal Empresa PrevencionJeannett MuñozBelum ada peringkat
- Tipificador de Multas 2020Dokumen151 halamanTipificador de Multas 2020alonso fonsecaBelum ada peringkat
- Art 38 BIS Termino de Giro Ley 21.210Dokumen9 halamanArt 38 BIS Termino de Giro Ley 21.210Jeannett MuñozBelum ada peringkat
- 07 Carpintero Obra GruesaDokumen3 halaman07 Carpintero Obra GruesaJeannett MuñozBelum ada peringkat
- Induccion y Entrega ReglamentoDokumen3 halamanInduccion y Entrega ReglamentoJeannett MuñozBelum ada peringkat
- Protocolo AccidentesDokumen4 halamanProtocolo AccidentesJeannett MuñozBelum ada peringkat
- Ejercicio Razonabilidd Capital PropioDokumen1 halamanEjercicio Razonabilidd Capital PropioChristian Gonzalez Lorca0% (1)
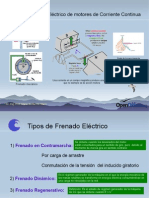
- Frenado ElectricoDokumen18 halamanFrenado Electricovampiredraak2712Belum ada peringkat
- Ensayo 5ta. J.E.G. PAES Anual-BiologÃ-a 2023Dokumen43 halamanEnsayo 5ta. J.E.G. PAES Anual-BiologÃ-a 2023MarcelineBelum ada peringkat
- Caida Libre Ejercicios de Aplicación Sobre Caida LibreDokumen4 halamanCaida Libre Ejercicios de Aplicación Sobre Caida LibreAndres Medina0% (1)
- Ejercicio 6.5Dokumen4 halamanEjercicio 6.5leslie2-18Belum ada peringkat
- Termo Met Extrac 1Dokumen33 halamanTermo Met Extrac 1Juan Alvarado ZegarraBelum ada peringkat
- Flicker o Parpadeo de Las Fuentes LuminosasDokumen40 halamanFlicker o Parpadeo de Las Fuentes LuminosasHector VanegasBelum ada peringkat
- Sica ContactoresDokumen2 halamanSica ContactoresMario RamirezBelum ada peringkat
- Informe Proyecto Fuente Regulada de Vari PDFDokumen13 halamanInforme Proyecto Fuente Regulada de Vari PDFMichael YamithBelum ada peringkat
- Pract 5. Segunda Ley de NewtonDokumen2 halamanPract 5. Segunda Ley de NewtonErick Rodriguez HerreraBelum ada peringkat
- Termodinamica Del PlasmaDokumen6 halamanTermodinamica Del PlasmaNatalia CisnerosBelum ada peringkat
- Laboratorio 04 Fisica III AñadidoDokumen13 halamanLaboratorio 04 Fisica III AñadidoPedro RosalesBelum ada peringkat
- Problemas OndasDokumen7 halamanProblemas OndasJesusBelum ada peringkat
- Teoría - Esfera de PlasmaDokumen3 halamanTeoría - Esfera de PlasmaAndersonBelum ada peringkat
- Limpieza de HuecoDokumen21 halamanLimpieza de HuecoRoger Alvarez0% (1)
- Manual de Electronica AnalogicaDokumen114 halamanManual de Electronica AnalogicaLorenzo Carsu100% (1)
- Expocision VoltimetroDokumen14 halamanExpocision VoltimetroJORGE PARRABelum ada peringkat
- AA 01 - 01 01EIwDokumen16 halamanAA 01 - 01 01EIwdiexboyBelum ada peringkat
- Cinética Energía de Un SólidoDokumen17 halamanCinética Energía de Un SólidocarlosBelum ada peringkat
- TAREA - Propiedades de Los FluidosDokumen2 halamanTAREA - Propiedades de Los FluidosMantenimiento Ing53Belum ada peringkat
- Guía de Ingreso A La Armada Argentina PDFDokumen37 halamanGuía de Ingreso A La Armada Argentina PDFMaria añazco0% (1)
- Guia N3 MontajeDokumen45 halamanGuia N3 MontajeValentina HernandezBelum ada peringkat
- Manual de Refrigeracion Comercial Basica Parte 1Dokumen21 halamanManual de Refrigeracion Comercial Basica Parte 1Angel GamezBelum ada peringkat
- Feria Científica: "Distribución de Presión en Los Puntos".Dokumen6 halamanFeria Científica: "Distribución de Presión en Los Puntos".Elihu Vazquez OrtizBelum ada peringkat
- Relacion Entre Carga Distribuida Fuerza y Momento Flecto ImprimirDokumen4 halamanRelacion Entre Carga Distribuida Fuerza y Momento Flecto ImprimirKarolina Mejia OlayaBelum ada peringkat
- Laboratorio Circuito RLCDokumen15 halamanLaboratorio Circuito RLCWilliam EspitiaBelum ada peringkat
- Teorema de Redes PDFDokumen110 halamanTeorema de Redes PDFPercio FortunatoBelum ada peringkat
- Precipitador ElectrostaticoDokumen2 halamanPrecipitador ElectrostaticoedgarBelum ada peringkat
- TECNOLOGIA OCTAVO GUIA 4 TERCER PERIODO-páginas-eliminadasDokumen5 halamanTECNOLOGIA OCTAVO GUIA 4 TERCER PERIODO-páginas-eliminadasJohn BEdoyassBelum ada peringkat
- Solucion Del Dinamica PDFDokumen7 halamanSolucion Del Dinamica PDFWuber RojasBelum ada peringkat
- Arranque Estrella Triangulo Del Motor Electrico TrifásicoDokumen10 halamanArranque Estrella Triangulo Del Motor Electrico TrifásicoJulio Yataco VivasBelum ada peringkat