Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- DYNA6 Manual With ExamplesDokumen227 halamanDYNA6 Manual With ExamplesDeepmalaJayesh100% (1)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Machine Tool StructuresDokumen10 halamanMachine Tool StructuresLowry GuettaBelum ada peringkat
- 1.center of Percussion of A Compound PendulumDokumen4 halaman1.center of Percussion of A Compound PendulumMuhammed Shameem N Edavannappara0% (1)
- General Use and Applicability of Slope Stability ChartsDokumen6 halamanGeneral Use and Applicability of Slope Stability ChartsLekhani DasanayakeBelum ada peringkat
- CIVE1129 - Lecture Notes - Consolidation PDFDokumen23 halamanCIVE1129 - Lecture Notes - Consolidation PDFLee Tin YanBelum ada peringkat
- Surge Analysis and Design - Case StudyDokumen10 halamanSurge Analysis and Design - Case StudyRaghuveer Rao PallepatiBelum ada peringkat
- Ship Stability in Wave A Proposal Method For Dynamic BehaviourDokumen6 halamanShip Stability in Wave A Proposal Method For Dynamic BehaviourParbati SahaBelum ada peringkat
- Elastic Column Buckling and The Effect of End RestraintDokumen2 halamanElastic Column Buckling and The Effect of End RestraintSandeep VaishnavBelum ada peringkat
- 5 2018 02 21!10 28 49 PMDokumen9 halaman5 2018 02 21!10 28 49 PMJoseph James MedinaBelum ada peringkat
- Hydraulic Gradient and Total Energy LineDokumen1 halamanHydraulic Gradient and Total Energy LineUmasree A KBelum ada peringkat
- Automatic Control, Basic Course FRTF05: ReglerteknikDokumen6 halamanAutomatic Control, Basic Course FRTF05: ReglerteknikAl-ShukaBelum ada peringkat
- Rheology Notes Uitm InternetDokumen2 halamanRheology Notes Uitm InternetYuchuk SatuBelum ada peringkat
- IScodes Soil DynamicsDokumen128 halamanIScodes Soil DynamicsRajashekar.PBelum ada peringkat
- Earthquakes and Faults LectureDokumen41 halamanEarthquakes and Faults Lectureervynsana100% (1)
- Chapter 3 - Bending MembersDokumen41 halamanChapter 3 - Bending MembersSuhailah SuhaimiBelum ada peringkat
- Load FactorDokumen4 halamanLoad Factormgskumar100% (1)
- Gaurav Arora: Target 2021 DPP - 3Dokumen4 halamanGaurav Arora: Target 2021 DPP - 3Devansh SangwanBelum ada peringkat
- SEW Compact Constant Speed Reducer MC SeriesDokumen195 halamanSEW Compact Constant Speed Reducer MC SeriesDênis DáyolBelum ada peringkat
- Determination of Metracentric HeightDokumen5 halamanDetermination of Metracentric HeightArbel AcurilBelum ada peringkat
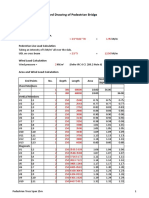
- Preparation of Standard Drawing of Pedestrian Bridge Span: 60 M Load CalculationsDokumen19 halamanPreparation of Standard Drawing of Pedestrian Bridge Span: 60 M Load CalculationsRoshan KejariwalBelum ada peringkat
- Formulas For InterferenceDokumen11 halamanFormulas For InterferenceParag Naik100% (1)
- 2002 HSC Notes From The Marking Centre PhysicsDokumen41 halaman2002 HSC Notes From The Marking Centre PhysicsReeja MathewBelum ada peringkat
- Jss 2 Basic Technology JSS 2 Third Term Examination - Marvel LearnDokumen1 halamanJss 2 Basic Technology JSS 2 Third Term Examination - Marvel LearnTriple Jay COC100% (1)
- Soil Scour Around Hydraulic Structures: Conference PaperDokumen14 halamanSoil Scour Around Hydraulic Structures: Conference PaperShane ClarkeBelum ada peringkat
- PUMPSDokumen151 halamanPUMPSAZIZ97% (30)
- Geotechnical Aspects of Building Design (EN 1997) : Eurocode 2Dokumen55 halamanGeotechnical Aspects of Building Design (EN 1997) : Eurocode 2margitorsiBelum ada peringkat
- Reflection of Shock WavesDokumen7 halamanReflection of Shock WavesRashad BryantBelum ada peringkat
- Descriptions of Fluid FlowsDokumen2 halamanDescriptions of Fluid FlowsdarshanBelum ada peringkat
- Subject: Theory of Machines-II: Sample Multiple Choice QuestionDokumen13 halamanSubject: Theory of Machines-II: Sample Multiple Choice QuestionSawai PareshBelum ada peringkat
- AIM-Sample Paper-02Dokumen15 halamanAIM-Sample Paper-02Bala ChinnappaBelum ada peringkat