Anda mungkin juga menyukai
- Physics Iit Jee Ebook - PDFDokumen29 halamanPhysics Iit Jee Ebook - PDFAjayMandapati84% (25)
- Handbook of Turbomachinery, Second Edition PDFDokumen67 halamanHandbook of Turbomachinery, Second Edition PDFitaryBelum ada peringkat
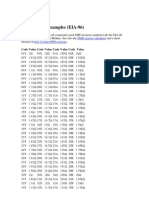
- SMD Resistor ExamplesDokumen5 halamanSMD Resistor Examplesmarcbuss100% (1)
- 16 PDFDokumen129 halaman16 PDFgBelum ada peringkat
- NR - Numerical Model of Single Main Rotor Helicopter DynamicsDokumen10 halamanNR - Numerical Model of Single Main Rotor Helicopter DynamicsHossam T BadranBelum ada peringkat
- Calculations for Science Fiction Writers/Circular OrbitsDari EverandCalculations for Science Fiction Writers/Circular OrbitsBelum ada peringkat
- Procedure For Field Joint CoatingDokumen10 halamanProcedure For Field Joint CoatingM Waqas HabibBelum ada peringkat
- 09 Rotational MotionDokumen10 halaman09 Rotational MotionBalaram MullapudiBelum ada peringkat
- Orbital Mechanics Gen SolutionsDokumen18 halamanOrbital Mechanics Gen SolutionsUsman Khalid100% (1)
- Three Axis Rotary PlatformDokumen6 halamanThree Axis Rotary PlatformSudhanwa KulkarniBelum ada peringkat
- Carpentry: Exploratory CourseDokumen25 halamanCarpentry: Exploratory CourseJohn Nelson Picones100% (3)
- Helicopter Dynamic Stability-1Dokumen7 halamanHelicopter Dynamic Stability-1KaradiasBelum ada peringkat
- Solutions for Biot's Poroelastic Theory in Key Engineering Fields: Theory and ApplicationsDari EverandSolutions for Biot's Poroelastic Theory in Key Engineering Fields: Theory and ApplicationsBelum ada peringkat
- Steam Boiler Technology (2003)Dokumen218 halamanSteam Boiler Technology (2003)Majid Sattar100% (3)
- FM200Dokumen23 halamanFM200Ahmed SherifBelum ada peringkat
- Pile Cap Design 4pilesDokumen6 halamanPile Cap Design 4pilesabshawBelum ada peringkat
- Chaadaev 2009Dokumen6 halamanChaadaev 2009Claude ClaudeBelum ada peringkat
- O A T A O Oatao: Pen Rchive Oulouse Rchive UverteDokumen16 halamanO A T A O Oatao: Pen Rchive Oulouse Rchive UverteAnonymous LU3Dz3TKtVBelum ada peringkat
- Paper Suspension Rocker BogieDokumen8 halamanPaper Suspension Rocker BogieJorge EstradaBelum ada peringkat
- Rohini 62520090311Dokumen4 halamanRohini 62520090311whoareyou9905Belum ada peringkat
- The Influence of Cracks in Rotating Shafts: To Cite This VersionDokumen26 halamanThe Influence of Cracks in Rotating Shafts: To Cite This VersionbungrisBelum ada peringkat
- AOSS321 L08 020309 Centrifugal Gravity Coriolis ForceDokumen65 halamanAOSS321 L08 020309 Centrifugal Gravity Coriolis ForceErvin ArrasyidBelum ada peringkat
- Theoretical and Experimental Research: Diagnosis of Some Feed Kinematic Chain Structure ElementsDokumen39 halamanTheoretical and Experimental Research: Diagnosis of Some Feed Kinematic Chain Structure ElementsNikhil ThakurBelum ada peringkat
- High Frequency Railway Vehicle Track Dynamics Through Flexible Rotating WheelsetsDokumen14 halamanHigh Frequency Railway Vehicle Track Dynamics Through Flexible Rotating WheelsetsAli KasimBelum ada peringkat
- Analysis of The Motion of A Gyro-Theodolite PDFDokumen12 halamanAnalysis of The Motion of A Gyro-Theodolite PDFNguyen Viet NghiaBelum ada peringkat
- Terminal Retrograde Turn of Rolling Rings: 10.1103/physreve.92.032913Dokumen5 halamanTerminal Retrograde Turn of Rolling Rings: 10.1103/physreve.92.032913luka lukaBelum ada peringkat
- TIGRISAT Orbital MotionSimulation and AnalysisDokumen8 halamanTIGRISAT Orbital MotionSimulation and AnalysisMohammad Chessab MahdiBelum ada peringkat
- Physics Grade 11 Unit Six Summary: Angular Motion /rotational Motion/ By:Addis Ababa Education Bureau MAY 2020Dokumen42 halamanPhysics Grade 11 Unit Six Summary: Angular Motion /rotational Motion/ By:Addis Ababa Education Bureau MAY 2020Sun TechBelum ada peringkat
- Automatic Elimination of Vibrations For A CentrifugeDokumen14 halamanAutomatic Elimination of Vibrations For A CentrifugeFiky Nuzulla DarsonoBelum ada peringkat
- Rotational InertiaDokumen4 halamanRotational Inertia이지민Belum ada peringkat
- Dynamics of Satellite Separation SystemDokumen12 halamanDynamics of Satellite Separation SystemDan StroescuBelum ada peringkat
- Dynamic Balancing of The SCARA Robot: To Cite This VersionDokumen9 halamanDynamic Balancing of The SCARA Robot: To Cite This VersionBAUTISTA BORDA ALEXANDERBelum ada peringkat
- Mathematical Model & Robot Design of Autonomous Underwater Vehicles (AUV) and Remotely Operated Vehicles (ROV)Dokumen6 halamanMathematical Model & Robot Design of Autonomous Underwater Vehicles (AUV) and Remotely Operated Vehicles (ROV)Farkas Ioana-IulianaBelum ada peringkat
- Gyroscope ReportDokumen22 halamanGyroscope Reportperis annBelum ada peringkat
- Kinematics of MechanismsDokumen82 halamanKinematics of MechanismsDharmesh PatelBelum ada peringkat
- Lateral Natural Frequency of A Shaft Rotor System by The Transfer Matrix MethodDokumen14 halamanLateral Natural Frequency of A Shaft Rotor System by The Transfer Matrix MethodcarlfelipeBelum ada peringkat
- Laval Jeffcott RotorDokumen23 halamanLaval Jeffcott RotorJidong WangBelum ada peringkat
- Optimal Relocation of Satellites Flying in Near-Circular-Orbit FormationsDokumen28 halamanOptimal Relocation of Satellites Flying in Near-Circular-Orbit Formationsfranco.sosaBelum ada peringkat
- Phy 101 Lecture Note 5Dokumen10 halamanPhy 101 Lecture Note 5bukolaesan48Belum ada peringkat
- Derivation of The Constants of The Motion For Central ForcesDokumen6 halamanDerivation of The Constants of The Motion For Central ForcesEpic WinBelum ada peringkat
- Beam VibrationDokumen20 halamanBeam Vibrationhmsedighi459Belum ada peringkat
- An Experimental Study Evaluating ParametDokumen12 halamanAn Experimental Study Evaluating ParametJonas Cândido Da SilvaBelum ada peringkat
- IAU 2000A and IAU 2006 Precession-Nutation Theories and Their Implementation - CoppolaDokumen20 halamanIAU 2000A and IAU 2006 Precession-Nutation Theories and Their Implementation - Coppoladbowden_333Belum ada peringkat
- 19.1 Attitude Determination and Control SystemsDokumen30 halaman19.1 Attitude Determination and Control SystemsAnkit MishraBelum ada peringkat
- Dynamics of Cylindrical and Spherical Objects On A TurntableDokumen25 halamanDynamics of Cylindrical and Spherical Objects On A TurntableanilbarikBelum ada peringkat
- Orbital Mechanics - Gen - SolutionsDokumen18 halamanOrbital Mechanics - Gen - SolutionsNouman1203Belum ada peringkat
- Quadcopter Math Model (Amazing)Dokumen26 halamanQuadcopter Math Model (Amazing)Joseph Oberholtzer83% (6)
- 2 Adaptive Learning Control For Spacecraft Formation FlyingDokumen13 halaman2 Adaptive Learning Control For Spacecraft Formation FlyingParampa DubBelum ada peringkat
- Rotations in QuantumDokumen5 halamanRotations in QuantumShami CosineroBelum ada peringkat
- Trajectory Optimization of The Exploration of Asteroids Using Swarm Intelligent AlgorithmsDokumen5 halamanTrajectory Optimization of The Exploration of Asteroids Using Swarm Intelligent AlgorithmsArmanBelum ada peringkat
- Robot T Hành 3 BánhDokumen21 halamanRobot T Hành 3 BánhHoa Dinh VanBelum ada peringkat
- GyroscopeDokumen7 halamanGyroscopeRajesh SarkarBelum ada peringkat
- A Nonlinear Est Imator For Reconstructing The Angular Velocity - 'L - Oputcr. - C/T/GyrosDokumen26 halamanA Nonlinear Est Imator For Reconstructing The Angular Velocity - 'L - Oputcr. - C/T/GyrosFirdous SaleheenBelum ada peringkat
- PHY133 Angular MomentumDokumen6 halamanPHY133 Angular MomentumAngel RodriguezBelum ada peringkat
- g484 Module 2 4 2 1circular MotionDokumen8 halamang484 Module 2 4 2 1circular Motionapi-236179294Belum ada peringkat
- Assignment 2Dokumen5 halamanAssignment 2Yang Woo SeongBelum ada peringkat
- Thomas Precession Is The Basis For The Structure of Matter and SpaceDokumen28 halamanThomas Precession Is The Basis For The Structure of Matter and SpaceALEX sponsoredBelum ada peringkat
- Robot Manipulators: Modeling, Performance Analysis and ControlDari EverandRobot Manipulators: Modeling, Performance Analysis and ControlBelum ada peringkat
- Full Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?Dari EverandFull Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?Belum ada peringkat
- Dynamic Deformation of Earth and Motion Effects Caused by Universe's Gravitational FieldDari EverandDynamic Deformation of Earth and Motion Effects Caused by Universe's Gravitational FieldBelum ada peringkat
- Modeling of Complex Systems: Application to Aeronautical DynamicsDari EverandModeling of Complex Systems: Application to Aeronautical DynamicsBelum ada peringkat
- Passive Cooling of The Green Roofs Combined With Night-Time Ventilation and Walls Insulation in Hot and Humid RegionsDokumen25 halamanPassive Cooling of The Green Roofs Combined With Night-Time Ventilation and Walls Insulation in Hot and Humid Regionsshailesh gautamBelum ada peringkat
- 2014 Summer Model Answer PaperDokumen20 halaman2014 Summer Model Answer Papercivil gpkpBelum ada peringkat
- Home Automation Control System Using DTMFDokumen25 halamanHome Automation Control System Using DTMFengaydiBelum ada peringkat
- EN 61000 3-2 GuideDokumen19 halamanEN 61000 3-2 Guideyunus emre KılınçBelum ada peringkat
- Seismic Force CANADA Code - CNBC2005-V421Dokumen7 halamanSeismic Force CANADA Code - CNBC2005-V421Niko NištićBelum ada peringkat
- Epi Gear 1 PDFDokumen21 halamanEpi Gear 1 PDFTrevaughn ParkinsonBelum ada peringkat
- Breakdown Price by DivisionsDokumen6 halamanBreakdown Price by DivisionsFoisulAlamBelum ada peringkat
- Opus UserguideDokumen313 halamanOpus UserguideMoez EssafiBelum ada peringkat
- Heavy Duty 2.5 Ton Long Frame Floor Jack Product ManualDokumen3 halamanHeavy Duty 2.5 Ton Long Frame Floor Jack Product ManualChris Epler100% (2)
- Figure 7.4 - Roughly One Third of The Projects Studied WereDokumen9 halamanFigure 7.4 - Roughly One Third of The Projects Studied WerelenanaBelum ada peringkat
- Key Features Boilermaker Proven, Legendary ReliabilityDokumen2 halamanKey Features Boilermaker Proven, Legendary ReliabilityManuel Cantoral CortazarBelum ada peringkat
- E-Line DLDokumen21 halamanE-Line DLiulian17dBelum ada peringkat
- Uponor Dop Klett CPR 20 Ic 251 V 001Dokumen3 halamanUponor Dop Klett CPR 20 Ic 251 V 001jamppajoo2Belum ada peringkat
- KEDDCO BinderDokumen74 halamanKEDDCO BinderWillian FigueroaBelum ada peringkat
- Functions of An EngineerDokumen5 halamanFunctions of An EngineerDEUS PHILIP DURANBelum ada peringkat
- Manual Kls MartinDokumen27 halamanManual Kls MartinChris AliBelum ada peringkat
- A Research Paper On Design and Analysis of Shaftless Steam TurbineDokumen5 halamanA Research Paper On Design and Analysis of Shaftless Steam TurbineEditor IJTSRDBelum ada peringkat
- Pre - Use Inspection Qualification: Date: Equipment Welding Machine Serial Number Model: LocationDokumen3 halamanPre - Use Inspection Qualification: Date: Equipment Welding Machine Serial Number Model: LocationEugenio Jr. MatesBelum ada peringkat
- Writer Keyboard Shortcuts CheatsheetDokumen1 halamanWriter Keyboard Shortcuts CheatsheetBrian100% (3)
- Project Title: Hotel Management Software Project: PurposeDokumen3 halamanProject Title: Hotel Management Software Project: PurposesuryaBelum ada peringkat
- Debug 1214Dokumen3 halamanDebug 1214Pandji AsmaraBelum ada peringkat
- Module D Exercise ModD - QB09 - EngDokumen4 halamanModule D Exercise ModD - QB09 - Engapi-3812894Belum ada peringkat
- Forming ProcessesDokumen8 halamanForming ProcessesKishor PatilBelum ada peringkat
- L1F1Dokumen5 halamanL1F1DanielBelum ada peringkat