Anda mungkin juga menyukai
- (Universitext) Peter Morris (Auth.) - Introduction To Game Theory (1994, Springer-Verlag New York)Dokumen240 halaman(Universitext) Peter Morris (Auth.) - Introduction To Game Theory (1994, Springer-Verlag New York)Jose Maria Lopez Belinchon88% (8)
- Assembly and Disassembly For GeneXpert IV R2Dokumen17 halamanAssembly and Disassembly For GeneXpert IV R2Sagir AlvaBelum ada peringkat
- Composite Bonded Joints AnalysisDokumen64 halamanComposite Bonded Joints Analysisjunjie yi100% (1)
- Class16 Dfa04 PDFDokumen34 halamanClass16 Dfa04 PDFعبدالحافظ زايدBelum ada peringkat
- FRANC3D V7 Training - Part 1 - Intro PDFDokumen41 halamanFRANC3D V7 Training - Part 1 - Intro PDFsanthoshnlBelum ada peringkat
- 02 - UML Use CasesDokumen67 halaman02 - UML Use CasesSaimo MghaseBelum ada peringkat
- 5-Year Maintenance On Hydra RackerDokumen2 halaman5-Year Maintenance On Hydra Rackermohamed hamedBelum ada peringkat
- Minutes of Meeting: Purpose: Attendees: Meeting Number: Apologies: Date: CC: Time: Chair: Location: ScribeDokumen3 halamanMinutes of Meeting: Purpose: Attendees: Meeting Number: Apologies: Date: CC: Time: Chair: Location: Scribejenny1509Belum ada peringkat
- Student work experience report in chemical engineeringDokumen7 halamanStudent work experience report in chemical engineeringRizzle25% (4)
- Love and Engineers - Viscous Wall Dampers Full Scale Test Program ToDokumen38 halamanLove and Engineers - Viscous Wall Dampers Full Scale Test Program Tokguse2bBelum ada peringkat
- Accidental Limit State Design of Offshore StructuresDokumen49 halamanAccidental Limit State Design of Offshore StructuresMukhlas SabaraBelum ada peringkat
- Design Project 1-5Dokumen31 halamanDesign Project 1-5Ťhě MariamBelum ada peringkat
- Introduction to Autodesk Inventor CAD SoftwareDokumen9 halamanIntroduction to Autodesk Inventor CAD SoftwareRais Alfiansyah TaufiqBelum ada peringkat
- Maintain Hydra RackerDokumen2 halamanMaintain Hydra Rackermohamed hamedBelum ada peringkat
- Training Needs Analysis for Kortek ElectronicsDokumen14 halamanTraining Needs Analysis for Kortek ElectronicsAnupma ShishodiaBelum ada peringkat
- CSI SAFE Course MaterialDokumen236 halamanCSI SAFE Course MaterialnekoBelum ada peringkat
- Weekly Maintenance On Hydra RackerDokumen4 halamanWeekly Maintenance On Hydra Rackermohamed hamedBelum ada peringkat
- Wren Assembly Test CNC SampleDokumen9 halamanWren Assembly Test CNC SampleRakunat IIIBelum ada peringkat
- Icem CFD Tut 12Dokumen15 halamanIcem CFD Tut 12greelmind7584Belum ada peringkat
- Lect 03 Eng DesignDokumen22 halamanLect 03 Eng DesignYathurshanBelum ada peringkat
- 247 en Storage Handling Procedure EnglishDokumen8 halaman247 en Storage Handling Procedure EnglishFrederico Rad FernandezBelum ada peringkat
- Customer NeedsDokumen28 halamanCustomer NeedsdharmaBelum ada peringkat
- Melco EMT 10/12TDokumen118 halamanMelco EMT 10/12TAlex PerexBelum ada peringkat
- Problem DefinitionDokumen7 halamanProblem DefinitionPetrus Petz WtzBelum ada peringkat
- 12ft X 17ft Murryhill Metal Garage Assembly InstructionsDokumen43 halaman12ft X 17ft Murryhill Metal Garage Assembly InstructionsGary KohlerBelum ada peringkat
- John Deere Cab Installation GuideDokumen28 halamanJohn Deere Cab Installation GuideMason100% (1)
- Design of A Solar Collector: For A Trochoidal Gear EngineDokumen13 halamanDesign of A Solar Collector: For A Trochoidal Gear EngineAbdo AdilBelum ada peringkat
- Basic repair hints and safety precautionsDokumen18 halamanBasic repair hints and safety precautionspikipelukiBelum ada peringkat
- KL Fatality Report SCF 20180112Dokumen11 halamanKL Fatality Report SCF 20180112Resta Sativa100% (1)
- Jigs PDFDokumen15 halamanJigs PDFMalayssa SacroBelum ada peringkat
- Design Transmission Systems ME8651Dokumen14 halamanDesign Transmission Systems ME8651aparunpravin079579Belum ada peringkat
- Bodywork Preparation Guide for Nubira/Lacetti VehiclesDokumen6 halamanBodywork Preparation Guide for Nubira/Lacetti Vehiclesjulio vicencioBelum ada peringkat
- Lecture 6 Games Studnent NotesDokumen38 halamanLecture 6 Games Studnent NotesShariff Oluoch OdiwuorBelum ada peringkat
- Alicante - Allona - Amor - Btledia3a - Smart Steep Evaluation 123Dokumen2 halamanAlicante - Allona - Amor - Btledia3a - Smart Steep Evaluation 123JACQUELINE BUHAYBelum ada peringkat
- The Eldoret National Polytechnic: Schemes of WorkDokumen5 halamanThe Eldoret National Polytechnic: Schemes of Workevans kiturBelum ada peringkat
- TR2 Ingles T... Trabajo FinalDokumen12 halamanTR2 Ingles T... Trabajo FinalAngelo OchoaBelum ada peringkat
- Drilling, Tapping & Threading: Learner GuideDokumen33 halamanDrilling, Tapping & Threading: Learner Guidebarad uamngBelum ada peringkat
- Pinewood Derby Car Manufacturing Project PlanDokumen7 halamanPinewood Derby Car Manufacturing Project PlanCarl WickstromBelum ada peringkat
- Item 4 - Hydraulic Machine PBL 2017Dokumen2 halamanItem 4 - Hydraulic Machine PBL 2017api-358731701Belum ada peringkat
- 501-02 Front End Body Panels Freelander 2Dokumen14 halaman501-02 Front End Body Panels Freelander 2narutoBelum ada peringkat
- Ioline Crystalpress: Quick Start GuideDokumen12 halamanIoline Crystalpress: Quick Start GuideCharles Lucero ParadaBelum ada peringkat
- Manufacturing Processes in Systems Vehicle DesignDokumen11 halamanManufacturing Processes in Systems Vehicle DesignCHERUYIOT IANBelum ada peringkat
- UNIS D Day 2077 ManualDokumen42 halamanUNIS D Day 2077 ManualPlay WomoBelum ada peringkat
- Safety Meeting Agenda in PDFDokumen8 halamanSafety Meeting Agenda in PDFIgede YadnyaBelum ada peringkat
- PT DetailingDokumen52 halamanPT Detailingcuongnguyen100% (4)
- Dura StiltsDokumen12 halamanDura Stiltsdonnal47Belum ada peringkat
- Getting The Shot: PhotzyDokumen26 halamanGetting The Shot: PhotzymrpiracyBelum ada peringkat
- Explicit Drop Test and Submodeling With ANSYS LS-DYNA: Chris CowanDokumen22 halamanExplicit Drop Test and Submodeling With ANSYS LS-DYNA: Chris CowanAnkush HBelum ada peringkat
- RRR 8 DDokumen401 halamanRRR 8 DRafi UdeenBelum ada peringkat
- DJM10012 Mechatronic Workshop Practice 1 (Fitting Workshop)Dokumen8 halamanDJM10012 Mechatronic Workshop Practice 1 (Fitting Workshop)Muhammad JazrilBelum ada peringkat
- Detailing For PTDokumen52 halamanDetailing For PTtengok69Belum ada peringkat
- 8D Problem AnalysisDokumen99 halaman8D Problem AnalysisLorena Martinez LaraBelum ada peringkat
- Instructions For The 8D Problem Analysis Report: HeaderDokumen117 halamanInstructions For The 8D Problem Analysis Report: HeaderisolongBelum ada peringkat
- MSE Wall DesignDokumen131 halamanMSE Wall DesignDipak Borsaikia100% (1)
- Lecture 1 Design ConsiderationsDokumen25 halamanLecture 1 Design ConsiderationsAbdelrahman yasser ZaghloulBelum ada peringkat
- Cine Gear Checklist Under 40Dokumen7 halamanCine Gear Checklist Under 40H LeeBelum ada peringkat
- Building Type Basics for Elementary and Secondary SchoolsDari EverandBuilding Type Basics for Elementary and Secondary SchoolsBelum ada peringkat
- Unleashing Innovation: How Whirlpool Transformed an IndustryDari EverandUnleashing Innovation: How Whirlpool Transformed an IndustryPenilaian: 3 dari 5 bintang3/5 (2)
- Uc 3717 ADokumen12 halamanUc 3717 ARoozbeh BahmanyarBelum ada peringkat
- TI TI: PLC Modem PLC ModemDokumen9 halamanTI TI: PLC Modem PLC ModemHyundianto AgBelum ada peringkat
- SonyDokumen52 halamanSonyapi-3720161Belum ada peringkat
- Prjtguidlns Ocw-EmbeddedDokumen6 halamanPrjtguidlns Ocw-Embeddedapi-3720161Belum ada peringkat
- 404 Westridge Dr. - Watsonville, CA 95076 831/761-6555 - 800/525-1609 - FAX 831/761-6544Dokumen12 halaman404 Westridge Dr. - Watsonville, CA 95076 831/761-6555 - 800/525-1609 - FAX 831/761-6544api-3720161Belum ada peringkat
- R T N C F T R T N R O T Nro A T C: Eport of HE Ational Ommission OR HE Eview of HE Ational Econnaissance FficeDokumen196 halamanR T N C F T R T N R O T Nro A T C: Eport of HE Ational Ommission OR HE Eview of HE Ational Econnaissance Fficeapi-3720161Belum ada peringkat
- lm355 PDFDokumen12 halamanlm355 PDFCesar VilledaBelum ada peringkat
- Servo Motors and Drives - AllDokumen68 halamanServo Motors and Drives - Allapi-3720161Belum ada peringkat
- TahoeDokumen58 halamanTahoeapi-3720161Belum ada peringkat
- SensorsDokumen30 halamanSensorsapi-3720161100% (1)
- NE555Dokumen14 halamanNE555api-3720161100% (1)
- Prps Guidlns Ocw-EmbeddedDokumen4 halamanPrps Guidlns Ocw-Embeddedapi-3720161Belum ada peringkat
- Lec 36-AssemblyDokumen3 halamanLec 36-Assemblyapi-3720161Belum ada peringkat
- Mid 2002 AnsDokumen8 halamanMid 2002 Ansapi-3720161Belum ada peringkat
- GoogletechfinalDokumen26 halamanGoogletechfinalapi-3720161Belum ada peringkat
- Homeland Security StrategyDokumen90 halamanHomeland Security Strategyapi-3720161Belum ada peringkat
- Final 2002 AnsDokumen10 halamanFinal 2002 Ansapi-3720161Belum ada peringkat
- Kozinski HarperDokumen37 halamanKozinski Harperapi-3720161Belum ada peringkat
- DaintroDokumen62 halamanDaintroapi-3720161Belum ada peringkat
- CorleyDokumen81 halamanCorleyapi-3720161Belum ada peringkat
- 19 - 20070327 - Course p-5 Spring 2005Dokumen74 halaman19 - 20070327 - Course p-5 Spring 2005api-3720161Belum ada peringkat
- Class 6 MacmillanDokumen23 halamanClass 6 Macmillanapi-3720161Belum ada peringkat
- 19 - 20070327 - Course p-3 Spring 2005Dokumen42 halaman19 - 20070327 - Course p-3 Spring 2005api-3720161Belum ada peringkat
- CampbellDokumen32 halamanCampbellapi-3720161Belum ada peringkat
- 19 - 20070327 - Course p-4 Spring 2005Dokumen70 halaman19 - 20070327 - Course p-4 Spring 2005api-3720161Belum ada peringkat
- 19 - 20070327 - Course p-1 Spring 2005Dokumen47 halaman19 - 20070327 - Course p-1 Spring 2005api-3720161Belum ada peringkat
- Curve Weighting: Effects of High - End Non - LinearityDokumen3 halamanCurve Weighting: Effects of High - End Non - LinearityhF2hFhiddenFaceBelum ada peringkat
- Positioning & ErrorsDokumen3 halamanPositioning & ErrorsAhsan Hussain100% (4)
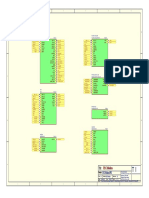
- UntitledDokumen2 halamanUntitledmoch bagas setya rahmanBelum ada peringkat
- Manual de Configuración y Comisionamiento OptiX RTN - U2000 PDFDokumen40 halamanManual de Configuración y Comisionamiento OptiX RTN - U2000 PDFJonathan Gonzalez.LBelum ada peringkat
- CEA201 CH11-DigitalLogicDokumen24 halamanCEA201 CH11-DigitalLogicTTBelum ada peringkat
- Review of Industrial Deployment of Multi-Agent SystemsDokumen24 halamanReview of Industrial Deployment of Multi-Agent SystemsVasant RaghavBelum ada peringkat
- Teach Yourself Logic 2020 - Peter SmithDokumen99 halamanTeach Yourself Logic 2020 - Peter SmithPaolo Pagliaro100% (1)
- Date Sheet (MST-I)Dokumen12 halamanDate Sheet (MST-I)Tauqeer AhmadBelum ada peringkat
- JioBusiness-ILL Product Leaflet DigitalDokumen1 halamanJioBusiness-ILL Product Leaflet Digitaljitendermcse9816Belum ada peringkat
- Function X - A Universal Decentralized InternetDokumen24 halamanFunction X - A Universal Decentralized InternetrahmahBelum ada peringkat
- Rais12 SM CH17Dokumen23 halamanRais12 SM CH17Anton VitaliBelum ada peringkat
- Epayroll System: User ManualDokumen66 halamanEpayroll System: User Manualvivek anandanBelum ada peringkat
- ABB Price Book 714Dokumen1 halamanABB Price Book 714EliasBelum ada peringkat
- 4 - Global Optimization For Bus Line Timetable Setting ProblemDokumen10 halaman4 - Global Optimization For Bus Line Timetable Setting ProblemBaran BaranyBelum ada peringkat
- Jean Abreu CVDokumen3 halamanJean Abreu CVABREUBelum ada peringkat
- Short Circuit Analysis For A Given Network Using ETAPDokumen4 halamanShort Circuit Analysis For A Given Network Using ETAPAkhter Iqbal100% (1)
- Churn Consultancy For V Case SharingDokumen13 halamanChurn Consultancy For V Case SharingObeid AllahBelum ada peringkat
- RF Basics - Part 1: Demystifying The DBDokumen6 halamanRF Basics - Part 1: Demystifying The DBRaúl InfanteBelum ada peringkat
- Database Assignment OverviewDokumen5 halamanDatabase Assignment Overviewitzaz yousafBelum ada peringkat
- Professional Astrology Software Review: Great Options at Every PriceDokumen8 halamanProfessional Astrology Software Review: Great Options at Every PricerfortezaBelum ada peringkat
- Industry LayoutDokumen31 halamanIndustry LayoutGiriraj T KulkarniBelum ada peringkat
- Surbhi Sharma: at HCL Pvt. LTDDokumen1 halamanSurbhi Sharma: at HCL Pvt. LTDJaskiran KaurBelum ada peringkat
- EC20 HMI Connection GuideDokumen3 halamanEC20 HMI Connection GuideGabriel Villa HómezBelum ada peringkat
- Ion Luca Caragiale, ReferatDokumen2 halamanIon Luca Caragiale, ReferatComan DanielBelum ada peringkat
- Your Order Has Been ApprovedDokumen5 halamanYour Order Has Been ApprovedSUBA NANTINI A/P M.SUBRAMANIAMBelum ada peringkat
- Ibm Websphere Application Server Advanced Edition, v3.5 - Websphere Jms - Jta Support For Mqseries (370K) WasDokumen49 halamanIbm Websphere Application Server Advanced Edition, v3.5 - Websphere Jms - Jta Support For Mqseries (370K) Wasimene IBBelum ada peringkat
- Battle of The Giants - Comparing Kimball and InmonDokumen15 halamanBattle of The Giants - Comparing Kimball and InmonFelipe Oliveira GutierrezBelum ada peringkat
- SAP Model Company For FinanceDokumen1 halamanSAP Model Company For FinanceAmar UbheBelum ada peringkat