Anda mungkin juga menyukai
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- Gift CardsDokumen36 halamanGift CardskarthikBelum ada peringkat
- Power BI ArchitectureDokumen47 halamanPower BI ArchitectureMadhavan Eyunni100% (1)
- Documents of Interest Re Synthetic Telepathy May 26, 2015Dokumen235 halamanDocuments of Interest Re Synthetic Telepathy May 26, 2015Stan J. CaterboneBelum ada peringkat
- Module 1 Web Systems and Technology 2Dokumen19 halamanModule 1 Web Systems and Technology 2Ron Marasigan100% (2)
- Decision Support SystemDokumen6 halamanDecision Support SystemNaveenBelum ada peringkat
- Java J2EE Made EasyDokumen726 halamanJava J2EE Made Easyeswar_jkBelum ada peringkat
- MVC Interview Questions AnswersDokumen12 halamanMVC Interview Questions AnswersKapil SharmaBelum ada peringkat
- Teaching Distance Relay Using Matlab - Simulink Graphical User Interface - Hafizi Idris - AcademiaDokumen4 halamanTeaching Distance Relay Using Matlab - Simulink Graphical User Interface - Hafizi Idris - AcademiarajababudonikiBelum ada peringkat
- Rechargeable Laptop Battery User ManualDokumen1 halamanRechargeable Laptop Battery User ManualVintonius Raffaele PRIMUSBelum ada peringkat
- Use CaseDokumen5 halamanUse CaseRoy MasterBelum ada peringkat
- GSA 3GPP Roadmap 1693182705Dokumen11 halamanGSA 3GPP Roadmap 1693182705Hamza BouchebbahBelum ada peringkat
- MVC NotesDokumen3 halamanMVC NotesSuraj MahajanBelum ada peringkat
- Functionality Type of License AxxonDokumen3 halamanFunctionality Type of License AxxonMikael leandroBelum ada peringkat
- Gbat V Mock (3) IctDokumen8 halamanGbat V Mock (3) Ictfeddy anddy0% (1)
- Itutor Prospectus 2013-2015 - FEB 16 - Itutor Fee StructureDokumen3 halamanItutor Prospectus 2013-2015 - FEB 16 - Itutor Fee StructureAnshuman DashBelum ada peringkat
- Transfer Order 6.10.23Dokumen1 halamanTransfer Order 6.10.23ShivajiBelum ada peringkat
- Dwi Hadianti, S.E: Mypersonal Profile Work ExperienceDokumen1 halamanDwi Hadianti, S.E: Mypersonal Profile Work ExperienceBumn Kuala Tungkal HebatBelum ada peringkat
- Variable Range Led VoltmeterDokumen1 halamanVariable Range Led VoltmeterweberpermetersquareBelum ada peringkat
- State of The ArtDokumen14 halamanState of The ArtsuryaBelum ada peringkat
- 11646.certificate IAS BGN1600066 - Hull 407 - WONDokumen3 halaman11646.certificate IAS BGN1600066 - Hull 407 - WONNorbertoBelum ada peringkat
- OMD-425 O2 AnalyzerDokumen1 halamanOMD-425 O2 Analyzerindra irawanBelum ada peringkat
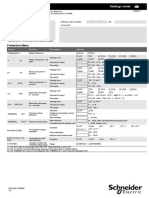
- VIP400 Settings Sheet NRJED311208ENDokumen2 halamanVIP400 Settings Sheet NRJED311208ENVăn NguyễnBelum ada peringkat
- Embedded SystemDokumen75 halamanEmbedded SystemDnyaneshwar KarhaleBelum ada peringkat
- Training Asylum ApplicationDokumen2 halamanTraining Asylum Applicationec_eiucBelum ada peringkat
- D63983GC20 - 30 - US Oracle Hyperion Financial Reporting 11.1.2 For EssbaseDokumen3 halamanD63983GC20 - 30 - US Oracle Hyperion Financial Reporting 11.1.2 For EssbaseChinmaya MishraBelum ada peringkat
- Vitruvian Principles - The Interdependancy of Firmitas, Utilitas and Venustas in Architecture and Design Pui's Blog PDFDokumen7 halamanVitruvian Principles - The Interdependancy of Firmitas, Utilitas and Venustas in Architecture and Design Pui's Blog PDFChristelle Joy EusebioBelum ada peringkat
- Lesson 23: HTML Interview QuestionsDokumen6 halamanLesson 23: HTML Interview QuestionssemibrevBelum ada peringkat
- Introduction To Correlation and Regression Analysis PDFDokumen6 halamanIntroduction To Correlation and Regression Analysis PDFAzra MuftiBelum ada peringkat
- Adhiraj Singh ParmarDokumen2 halamanAdhiraj Singh ParmarAshok SambasivanBelum ada peringkat
- Steps To Replace Spare Parts of KX5600Dokumen5 halamanSteps To Replace Spare Parts of KX5600Freire Jose FranciscoBelum ada peringkat