Anda mungkin juga menyukai
- Calculo de Potencias Reactiva y Aparente A Partir de La Activa Marco TeoricoDokumen5 halamanCalculo de Potencias Reactiva y Aparente A Partir de La Activa Marco TeoricoLuis Enrique Rojas FernándezBelum ada peringkat
- Disparo de TiristoresDokumen13 halamanDisparo de TiristoresЭРекиBelum ada peringkat
- Rectificadores monofásicos y trifásicos: cálculos y parámetrosDokumen7 halamanRectificadores monofásicos y trifásicos: cálculos y parámetrosJose Antonio Romero Gamboa100% (1)
- Amplificadores operacionales manual prácticas con . Resume el tema central del documento que es un manual de prácticas sobre amplificadores operacionalesDokumen28 halamanAmplificadores operacionales manual prácticas con . Resume el tema central del documento que es un manual de prácticas sobre amplificadores operacionalesJose Agustin Hernandez BenitezBelum ada peringkat
- PLCDokumen7 halamanPLCSebastián PérezBelum ada peringkat
- Design To OscilatorDokumen55 halamanDesign To Oscilatorroymer lopez100% (3)
- Supra ArmonicosDokumen4 halamanSupra ArmonicosAlexander NarvaezBelum ada peringkat
- Reporte Fuente 24 VDokumen11 halamanReporte Fuente 24 VjesusBelum ada peringkat
- Ejerciciospracticos Maquinas ElectricasDokumen17 halamanEjerciciospracticos Maquinas ElectricasMiguel Esteban MartinezBelum ada peringkat
- Régimen Transitorio de Segundo OrdenDokumen19 halamanRégimen Transitorio de Segundo OrdenSebastian segoviaBelum ada peringkat
- Fundamentos de PLC con Siemens S7-300Dokumen123 halamanFundamentos de PLC con Siemens S7-300Omar Curo PariBelum ada peringkat
- Norma Mexicana Ance: Norma Coordinación de Aislamiento - Parte 2: Guía de AplicaciónDokumen147 halamanNorma Mexicana Ance: Norma Coordinación de Aislamiento - Parte 2: Guía de AplicaciónESMERALDA ALEJANDREBelum ada peringkat
- 20 Fallas ComentadasDokumen0 halaman20 Fallas Comentadasybenites2012Belum ada peringkat
- Reconocimiento de patronesDokumen9 halamanReconocimiento de patronesLuis Brito100% (1)
- Aumento corriente controlada rectificadores emergencia plantas electroobtención cobreDokumen5 halamanAumento corriente controlada rectificadores emergencia plantas electroobtención cobreCristian Jesus Peinado Pacheco100% (1)
- SolidEdge ST3, Tutoriales Oficiales en Español PDFDokumen1.697 halamanSolidEdge ST3, Tutoriales Oficiales en Español PDFOmar Sánchez100% (1)
- PWM Con LabViewDokumen71 halamanPWM Con LabViewBenito SanchezBelum ada peringkat
- Masa y Tierra PDFDokumen7 halamanMasa y Tierra PDFRaul Roque Yujra100% (1)
- Importancia del electromagnetismo en la sociedad modernaDokumen2 halamanImportancia del electromagnetismo en la sociedad modernaAlisson GutierrezBelum ada peringkat
- Simulación de un Modulador Transistorizado en AM con Doble Banda Lateral en MultisimDokumen40 halamanSimulación de un Modulador Transistorizado en AM con Doble Banda Lateral en MultisimCeCy UMBelum ada peringkat
- Carga y descarga condensadorDokumen9 halamanCarga y descarga condensadorPaul NarvaezBelum ada peringkat
- Practica 003Dokumen35 halamanPractica 003Fernando GómezBelum ada peringkat
- Modelado Del Transistor BJT-1Dokumen48 halamanModelado Del Transistor BJT-1Sil AriasBelum ada peringkat
- Introducción al análisis de sistemas de potencia con EMTP/ATP DrawDokumen7 halamanIntroducción al análisis de sistemas de potencia con EMTP/ATP Drawahmadove1Belum ada peringkat
- Motores Electricos para BusesDokumen9 halamanMotores Electricos para BusesricardoBelum ada peringkat
- Prácticas Con El MS150Dokumen11 halamanPrácticas Con El MS150parfreeBelum ada peringkat
- Controlador Carga de BateriaDokumen6 halamanControlador Carga de BateriaJhon PinillaBelum ada peringkat
- Apuntes Del Microprocesador 8085 2017 ED15Dokumen114 halamanApuntes Del Microprocesador 8085 2017 ED15MEKArot100% (1)
- Circuito de luces audiorítmicas con filtros activosDokumen12 halamanCircuito de luces audiorítmicas con filtros activosMidwar Miguel ChuraBelum ada peringkat
- Análisis de circuitos sinusoidalesDokumen75 halamanAnálisis de circuitos sinusoidalesAriel MartinoBelum ada peringkat
- Práctica No5 Ascensor de 4 Niveles Ce-IDokumen3 halamanPráctica No5 Ascensor de 4 Niveles Ce-Imaria joseBelum ada peringkat
- Troceadores Tipo BDokumen6 halamanTroceadores Tipo BNey Raul Benji JoaquinBelum ada peringkat
- Motor de Reluctancia Con InversorDokumen46 halamanMotor de Reluctancia Con InversorMaxBelum ada peringkat
- Informe Accionamientos Eléctricos: Sensores de Corriente y VoltajeDokumen6 halamanInforme Accionamientos Eléctricos: Sensores de Corriente y VoltajeCarolina BastidasBelum ada peringkat
- Característica de Los Terminales de Un Motor de CD en SerieDokumen1 halamanCaracterística de Los Terminales de Un Motor de CD en Serieelectrico_01Belum ada peringkat
- Control de Velocidad de Los Motres de Induccion MonofasicoDokumen11 halamanControl de Velocidad de Los Motres de Induccion MonofasicoJuan Alvarado LujanBelum ada peringkat
- Guia 2 e Potencia - Transis SCR Triacs OptoDokumen21 halamanGuia 2 e Potencia - Transis SCR Triacs Optobraian calderonBelum ada peringkat
- Exposicion de Protocolo Ipx-SpxDokumen26 halamanExposicion de Protocolo Ipx-SpxCarlos Alberto Fernández FalenBelum ada peringkat
- Reporte - Practica - Uso de Motor Sincrono en Software Multisim.Dokumen17 halamanReporte - Practica - Uso de Motor Sincrono en Software Multisim.Jorge CardenasBelum ada peringkat
- Trabajo de Flujo de PotenciaDokumen21 halamanTrabajo de Flujo de PotenciaRoberto Giura100% (1)
- Control SupervisorDokumen10 halamanControl SupervisorTacoMedinaOscarBelum ada peringkat
- Electrónica de PotenciaDokumen214 halamanElectrónica de PotenciaAndrew VargasBelum ada peringkat
- Amplificador Operacional 741 Configuración InversoraDokumen22 halamanAmplificador Operacional 741 Configuración InversoraAyrton FloresBelum ada peringkat
- 1.2 Resultante de Fuerzas CoplanaresDokumen13 halaman1.2 Resultante de Fuerzas Coplanaresjavier verduzcoBelum ada peringkat
- Practica Arrancador para Motor ElectricoDokumen4 halamanPractica Arrancador para Motor Electricodaniel_pulido_63Belum ada peringkat
- Ecopetrol-Documento Referencia para Uso de WirelessDokumen115 halamanEcopetrol-Documento Referencia para Uso de WirelessmaserrasBelum ada peringkat
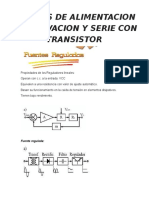
- Fuentes de Alimentacion en Derivacion y Serie Con Transistor - CDokumen12 halamanFuentes de Alimentacion en Derivacion y Serie Con Transistor - CCristian Calle Garcia100% (2)
- Tema 5 Aparamenta y ProtecciónDokumen28 halamanTema 5 Aparamenta y ProtecciónFrancisco Manuel Pelaez RuizBelum ada peringkat
- Control de tensión mediante potencia reactivaDokumen19 halamanControl de tensión mediante potencia reactivamiguel covaBelum ada peringkat
- Memoria Tecnica ChahuitesDokumen17 halamanMemoria Tecnica Chahuitesvaldiviezo_luis_ingBelum ada peringkat
- Flameo Del Aire Entre Electrodos. Diego VargasDokumen4 halamanFlameo Del Aire Entre Electrodos. Diego VargasDiego VargasBelum ada peringkat
- Motor SaverDokumen0 halamanMotor SaverFredy Martínez GonzaloBelum ada peringkat
- 01 - Control Vectorial - 2020Dokumen134 halaman01 - Control Vectorial - 2020Gabriel Alonso Olmedo AlvarezBelum ada peringkat
- Electronica de PotenciaDokumen21 halamanElectronica de PotenciaMheychel 'MlndzBelum ada peringkat
- Curso semipresencial de semiconductoresDokumen20 halamanCurso semipresencial de semiconductoresCarlos Jose Rodriguez MartinezBelum ada peringkat
- Grafcet Neumatica Paso A PasoDokumen76 halamanGrafcet Neumatica Paso A Pasojjurado183Belum ada peringkat
- Principios del análisis de Fourier: Variaciones sobre un tema clásicoDari EverandPrincipios del análisis de Fourier: Variaciones sobre un tema clásicoBelum ada peringkat
- Convertidores conmutados de potencia: Test de autoevaluaciónDari EverandConvertidores conmutados de potencia: Test de autoevaluaciónPenilaian: 5 dari 5 bintang5/5 (1)
- Puente HDokumen4 halamanPuente HFernando AyonBelum ada peringkat
- InversortranDokumen5 halamanInversortraninstitutotecnologiaBelum ada peringkat
- MultiplexDokumen1 halamanMultiplexAntony LopezBelum ada peringkat
- Multiplex I OnDokumen1 halamanMultiplex I OnAntony LopezBelum ada peringkat
- Multiplex I OnDokumen1 halamanMultiplex I OnAntony LopezBelum ada peringkat
- LaplaceDokumen17 halamanLaplaceplanchafieeBelum ada peringkat
- EXPO Los TransistoresDokumen3 halamanEXPO Los TransistoresAntony LopezBelum ada peringkat
- Circuito Sometido A Un Escalón de Tensión ( ) : Editar Editar FuenteDokumen5 halamanCircuito Sometido A Un Escalón de Tensión ( ) : Editar Editar FuenteAntony LopezBelum ada peringkat
- Circuito Sometido A Un Escalón de Tensión ( ) : Editar Editar FuenteDokumen5 halamanCircuito Sometido A Un Escalón de Tensión ( ) : Editar Editar FuenteAntony LopezBelum ada peringkat
- Inf. 3Dokumen23 halamanInf. 3Antony LopezBelum ada peringkat
- Laplace y MatlabDokumen47 halamanLaplace y MatlabAntony LopezBelum ada peringkat
- LemDokumen5 halamanLemAntony LopezBelum ada peringkat
- Guía puesta tierra hospitalesDokumen14 halamanGuía puesta tierra hospitalessantovaron123Belum ada peringkat
- LemDokumen5 halamanLemAntony LopezBelum ada peringkat
- Brother HLDokumen1 halamanBrother HLAntony LopezBelum ada peringkat
- Neumatica 01Dokumen7 halamanNeumatica 01Antony LopezBelum ada peringkat
- Neumatica 02Dokumen10 halamanNeumatica 02Antony LopezBelum ada peringkat
- Autonomia de La Voluntad!Dokumen3 halamanAutonomia de La Voluntad!Antony LopezBelum ada peringkat
- Transistor Bipolar en ConmutaciönDokumen1 halamanTransistor Bipolar en ConmutaciönAntony LopezBelum ada peringkat
- Modalidad de Exámenes - Semana 1 - Lenguaje EnsambladorDokumen2 halamanModalidad de Exámenes - Semana 1 - Lenguaje EnsambladorGonzales Vargas EfrinBelum ada peringkat
- Las cuentas contables, su clasificación y el catálogo de cuentasDokumen4 halamanLas cuentas contables, su clasificación y el catálogo de cuentasnancy yissela gonzalez rodriguezBelum ada peringkat
- Mga Web 2023544050059 AgropecuarioDokumen41 halamanMga Web 2023544050059 Agropecuarioharold balagueraBelum ada peringkat
- Tema 9. - Jarabes y Disoluciones OralesDokumen62 halamanTema 9. - Jarabes y Disoluciones OralesroxanaBelum ada peringkat
- UnadmDokumen4 halamanUnadmhectorBelum ada peringkat
- T-Ec3-180 F.E.Dokumen117 halamanT-Ec3-180 F.E.Yanira CeronBelum ada peringkat
- Casos Practicos Analisis FinacierosDokumen5 halamanCasos Practicos Analisis FinacierosYesid GomezBelum ada peringkat
- LIBERALISMO CLÁSICO POLÍTICO Y ECONÓMICODokumen13 halamanLIBERALISMO CLÁSICO POLÍTICO Y ECONÓMICODiana Kusanovic PivcevicBelum ada peringkat
- Unidad 5 Legislación LaboralDokumen8 halamanUnidad 5 Legislación LaboralJosé M. Fernández100% (1)
- 1.3.1 Costos Por OTDokumen15 halaman1.3.1 Costos Por OTMichael SolisBelum ada peringkat
- Crucigrama Cableado Estructurado PDFDokumen2 halamanCrucigrama Cableado Estructurado PDFCarlos Alberto RuizBelum ada peringkat
- Manual de operación del analizador automático de química clínica H-200Dokumen60 halamanManual de operación del analizador automático de química clínica H-200Pedro DueñasBelum ada peringkat
- Alpha Crs Plus Pip SPDokumen5 halamanAlpha Crs Plus Pip SPGotas DToilBelum ada peringkat
- Trabajo Final APALANCAMIENTO FINANCIERODokumen13 halamanTrabajo Final APALANCAMIENTO FINANCIEROgianny mendezBelum ada peringkat
- Planeación Por Proyectos ABPDokumen3 halamanPlaneación Por Proyectos ABPSarvia Raquel Eunice RiveraBelum ada peringkat
- Conversión de EECC (Version Completa)Dokumen62 halamanConversión de EECC (Version Completa)Jorge CenturiónBelum ada peringkat
- DPDokumen2 halamanDPOscar Dario Suarez WalterosBelum ada peringkat
- S1-Gestion de Operaciones - Grupo 7 - S1Dokumen8 halamanS1-Gestion de Operaciones - Grupo 7 - S1LESLIE ALEXANDRA ARROYO CARHUAJULCABelum ada peringkat
- Acta - Nacimiento TaniaDokumen1 halamanActa - Nacimiento TaniaRaquel VeraBelum ada peringkat
- Practica 8Dokumen2 halamanPractica 8Carlos Alberto Hernandez LimonBelum ada peringkat
- Funciones y LímitesDokumen5 halamanFunciones y LímitesIsmaelBurgosBelum ada peringkat
- Conceptos e Importancia de La CalidadDokumen27 halamanConceptos e Importancia de La CalidadDaniela MoralesBelum ada peringkat
- TC001 TareaDokumen6 halamanTC001 TareaTHOMASBelum ada peringkat
- Informe PAE UDAIDokumen2 halamanInforme PAE UDAIAlexis CastilloBelum ada peringkat
- DNC Files - 8183Dokumen15 halamanDNC Files - 8183loloespinoBelum ada peringkat
- Reglamento General UFI 2018 PDFDokumen47 halamanReglamento General UFI 2018 PDFFélix Llamosas84% (19)
- ModeloNegocioPeajesElectrónicosRFIDDokumen1 halamanModeloNegocioPeajesElectrónicosRFIDDanielPonteBuitragoBelum ada peringkat
- Taller 3 Cinematica UnidimensionalDokumen2 halamanTaller 3 Cinematica UnidimensionalAnonymous xdBcnJkswBelum ada peringkat
- Ejercicio Quim1Dokumen2 halamanEjercicio Quim1Osmar Alejandro Betancourt AvelloBelum ada peringkat
- Proyecto de AmbientalDokumen17 halamanProyecto de Ambientalbeker narvaezBelum ada peringkat