Anda mungkin juga menyukai
- Operation Instructions VOCOM II ToughDokumen72 halamanOperation Instructions VOCOM II ToughmusharrfBelum ada peringkat
- Electrical SystemDokumen2 halamanElectrical Systemdaniel_jorge_10Belum ada peringkat
- KoordinatorDokumen31 halamanKoordinatorSaid Daden100% (2)
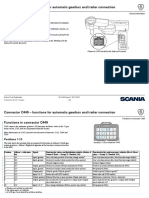
- Connector C449 - Functions For Automatic Gearbox and Trailer Connection General InformationDokumen3 halamanConnector C449 - Functions For Automatic Gearbox and Trailer Connection General InformationmbpajaBelum ada peringkat
- Overview, Vehicle Management Computer, Sheet 1 of 3Dokumen1 halamanOverview, Vehicle Management Computer, Sheet 1 of 3ali100% (1)
- Audi Volkswagen - 2.0L Chain Drive - P0016 Cam - Crank Correlation Check - Ross-Tech ForumsDokumen6 halamanAudi Volkswagen - 2.0L Chain Drive - P0016 Cam - Crank Correlation Check - Ross-Tech ForumsMatias Meinero100% (1)
- CrankshaftDokumen13 halamanCrankshaftVinod Cf Cruz100% (2)
- MAN TRUCK FAULT CODES GUIDEDokumen6 halamanMAN TRUCK FAULT CODES GUIDEReginaldo Elizelton100% (1)
- Electric Throttle: Issue 1Dokumen40 halamanElectric Throttle: Issue 1asesmen mekanik100% (1)
- Motor Operation ValveDokumen86 halamanMotor Operation Valvenomurapre100% (1)
- MAN FFR Fault Codes List PDFDokumen13 halamanMAN FFR Fault Codes List PDFДмитрий Андрущенко100% (1)
- 2019 Gran I10 G 1.2 Mpi-DiagramDokumen1 halaman2019 Gran I10 G 1.2 Mpi-DiagramDarwin MosqueraBelum ada peringkat
- Trouble Shoot ScaniaDokumen77 halamanTrouble Shoot ScaniaTjoa Gin Hao75% (4)
- Hvac - Centralized AC SystemDokumen21 halamanHvac - Centralized AC SystemVala Vraj M.Belum ada peringkat
- Manual For Induction Motors and Generators - RevJ - ENDokumen154 halamanManual For Induction Motors and Generators - RevJ - ENEduard NurmetovBelum ada peringkat
- 89421116-Wiring Diagram, FMDokumen366 halaman89421116-Wiring Diagram, FMalexandremartins1513Belum ada peringkat
- MAN TGA FFR Component List PDFDokumen5 halamanMAN TGA FFR Component List PDFAlexander GryshcheniukBelum ada peringkat
- Scania Ebs5 WiringDokumen1 halamanScania Ebs5 WiringRafo CaceresBelum ada peringkat
- Engine Data D12 PDFDokumen20 halamanEngine Data D12 PDFClaudesson Nascimento Rodrigues100% (1)
- Autocom Faq - VolkswagenDokumen3 halamanAutocom Faq - VolkswagenAvs ElectronBelum ada peringkat
- Mobydic 4910Dokumen8 halamanMobydic 4910Alexking1985Belum ada peringkat
- R420 LA6x4 EHZ Heavy Hauler - tcm55-164707Dokumen2 halamanR420 LA6x4 EHZ Heavy Hauler - tcm55-164707mihaitza_xxx92Belum ada peringkat
- How to Use Cookies and Privacy Settings on This SiteDokumen145 halamanHow to Use Cookies and Privacy Settings on This SiteBota NicusorBelum ada peringkat
- Mitsubishi Diagnostic Codes GuideDokumen12 halamanMitsubishi Diagnostic Codes Guideน้องกอย่า วงศ์เครือBelum ada peringkat
- TM 9-6115-464-34 Mep-004a, - 103a, - 113aDokumen493 halamanTM 9-6115-464-34 Mep-004a, - 103a, - 113aAdvocateBelum ada peringkat
- STRALIS Pokyny Vydanie 2007 PDFDokumen232 halamanSTRALIS Pokyny Vydanie 2007 PDFLeon CiprianBelum ada peringkat
- Repair S6 EMS Problem T7475Dokumen4 halamanRepair S6 EMS Problem T7475bian lyBelum ada peringkat
- Zepro Card Install. InstrucDokumen29 halamanZepro Card Install. InstrucriisseliBelum ada peringkat
- DaimlerChrysler Engine control with MR-PLD documentationDokumen150 halamanDaimlerChrysler Engine control with MR-PLD documentationMoni Gote del Ortus53% (32)
- Autocom CDP Pro For Trucks Workable Trucks Models EngDokumen624 halamanAutocom CDP Pro For Trucks Workable Trucks Models Engsausalp1998Belum ada peringkat
- Scania Connector GuideDokumen26 halamanScania Connector Guidebahrudin100% (1)
- Work Boats: SVA/SVAL 630 - 1400 - 3,000 - 20,000 KWDokumen8 halamanWork Boats: SVA/SVAL 630 - 1400 - 3,000 - 20,000 KWJulia FalconeBelum ada peringkat
- Newtrasdata Ecu ListDokumen7 halamanNewtrasdata Ecu ListdoktorskiBelum ada peringkat
- Iveco Especificaciones y Diagramas Stralis Trakker 2 PDFDokumen4 halamanIveco Especificaciones y Diagramas Stralis Trakker 2 PDFSaidi JalelBelum ada peringkat
- Remove Unit InjectorDokumen55 halamanRemove Unit InjectorГеоргий222Belum ada peringkat
- Field Service Tips: Fault tracing on D6B enginesDokumen3 halamanField Service Tips: Fault tracing on D6B enginesyazeed naibanBelum ada peringkat
- ADC Interface MKII1Dokumen1 halamanADC Interface MKII1bloodbathBelum ada peringkat
- Iveco LA Vehicle Error CodesDokumen1 halamanIveco LA Vehicle Error CodesHamidBelum ada peringkat
- BMW ABS and ASC fault codes explainedDokumen11 halamanBMW ABS and ASC fault codes explainedMshiboniumBelum ada peringkat
- Adjustable Parameters - EngineDokumen33 halamanAdjustable Parameters - EnginescaniaBelum ada peringkat
- 70161kerax PNG AnDokumen170 halaman70161kerax PNG AnRoy Ferdy MassoloBelum ada peringkat
- MID 140 Instrument Cluster Signal Description (Spesifications 381)Dokumen20 halamanMID 140 Instrument Cluster Signal Description (Spesifications 381)Lazuardhitya oktanandaBelum ada peringkat
- Old Elec SpeedoDokumen7 halamanOld Elec SpeedoDony AvaterBelum ada peringkat
- Ecm 128Dokumen18 halamanEcm 128Balmukund AgarwalBelum ada peringkat
- Elc Scania Tp98110aDokumen2 halamanElc Scania Tp98110aBabei Ionut-Mihai0% (1)
- 2006 Trans Eng12Dokumen19 halaman2006 Trans Eng12eurospeed2Belum ada peringkat
- Eecu - Installation Instructions: in The Wiring Distribution Box Under The Hood On The Passenger SideDokumen1 halamanEecu - Installation Instructions: in The Wiring Distribution Box Under The Hood On The Passenger SideTadeu SalesBelum ada peringkat
- Man Engine Brake (English)Dokumen8 halamanMan Engine Brake (English)W MoralesBelum ada peringkat
- Stm32f4 CANDokumen1 halamanStm32f4 CANkars_jk4943100% (1)
- A B1 F8 F7 F6Dokumen4 halamanA B1 F8 F7 F6Mircea GilcaBelum ada peringkat
- Stralis 8x2x6 Presell Catalogue January 2008Dokumen60 halamanStralis 8x2x6 Presell Catalogue January 2008sukul100% (3)
- Vaz 2111 Error Codes PDFDokumen47 halamanVaz 2111 Error Codes PDFdragon_ecu100% (1)
- Basic Function Control Unit Front Module (FM)Dokumen9 halamanBasic Function Control Unit Front Module (FM)Eko Budi Sky100% (1)
- 6-Speed Synchromesh Transmission For Small Trucks: ZF-Ecolite (Truck)Dokumen2 halaman6-Speed Synchromesh Transmission For Small Trucks: ZF-Ecolite (Truck)eng_pontinBelum ada peringkat
- MID 216 PSID 11 Brake Light Right SideDokumen3 halamanMID 216 PSID 11 Brake Light Right SideTun Tun Win Kse100% (1)
- ECU List - 5.8 - New FeaturesDokumen4 halamanECU List - 5.8 - New FeaturesMahesh MirajkarBelum ada peringkat
- 043 Man TruckDokumen4 halaman043 Man TruckFilipposBelum ada peringkat
- Product Scout Automotive: Oducts FR Om Onics Only!Dokumen6 halamanProduct Scout Automotive: Oducts FR Om Onics Only!Vel MuruganBelum ada peringkat
- MAN-Trouble Codes - EDC7 - 3737 A 3996Dokumen22 halamanMAN-Trouble Codes - EDC7 - 3737 A 3996GastaoBelum ada peringkat
- Mid 185 - Ppid 294 - Fmi 9Dokumen3 halamanMid 185 - Ppid 294 - Fmi 9AkbarBelum ada peringkat
- Wabco WurthDokumen10 halamanWabco Wurthameth vegaBelum ada peringkat
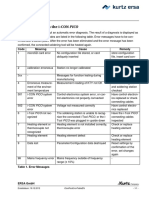
- Error Messages in The i-CON PICODokumen1 halamanError Messages in The i-CON PICOIvana Ika StankovicBelum ada peringkat
- Rugged Vocom 88890300 Communication Unit for Tough EnvironmentsDokumen2 halamanRugged Vocom 88890300 Communication Unit for Tough EnvironmentsJulito CastellanosBelum ada peringkat
- ЭБУ в машинахDokumen93 halamanЭБУ в машинахАлександр КулаковBelum ada peringkat
- Azteeg X3 Wiring DiagramDokumen2 halamanAzteeg X3 Wiring DiagramelectroternalBelum ada peringkat
- Fgtech Driver List Truck Tractor 2Dokumen8 halamanFgtech Driver List Truck Tractor 2ibrahemBelum ada peringkat
- For Intermittent Service: TEEF 3x5 For Well Servicing Performance RatingDokumen2 halamanFor Intermittent Service: TEEF 3x5 For Well Servicing Performance RatingcacaunpsBelum ada peringkat
- Data TWD1643 GEDokumen17 halamanData TWD1643 GEVolvo Truck100% (3)
- Series: Electric Chain HoistDokumen16 halamanSeries: Electric Chain HoistAmazonas ManutençãoBelum ada peringkat
- OC442012e FN72-00 (F2000) SPECIFICATIONS 11-00Dokumen7 halamanOC442012e FN72-00 (F2000) SPECIFICATIONS 11-00profistarBelum ada peringkat
- ALFA LAVAL Repuestos MMPX303 PDFDokumen46 halamanALFA LAVAL Repuestos MMPX303 PDFMARCO VERAMENDIBelum ada peringkat
- Price-List Polycab Industrial Flexible CablesDokumen3 halamanPrice-List Polycab Industrial Flexible CablesVirendraDwivediBelum ada peringkat
- Electric Bicycle (E-BIKE)Dokumen16 halamanElectric Bicycle (E-BIKE)k rajendraBelum ada peringkat
- Despiece, A440Dokumen6 halamanDespiece, A440AUTOPARTES 1987Belum ada peringkat
- MGM College Project on Multi-Purpose Operational MachineDokumen14 halamanMGM College Project on Multi-Purpose Operational MachineKIRSHANT TomerBelum ada peringkat
- Lab6maquinas HampdenDokumen5 halamanLab6maquinas HampdenJose Ricardo hernandezBelum ada peringkat
- Installation and Maintenance Instructions: Resilient Seat Butterfly ValvesDokumen12 halamanInstallation and Maintenance Instructions: Resilient Seat Butterfly ValvesBhargav PatelBelum ada peringkat
- M44DDokumen8 halamanM44Dfm.gruianuBelum ada peringkat
- A Little About My Analysis of The ZF4hp14 Automatic Transmission. Upd. No Car, I Don't Answer QuestionsDokumen21 halamanA Little About My Analysis of The ZF4hp14 Automatic Transmission. Upd. No Car, I Don't Answer QuestionsMiguel Bento100% (1)
- A Matlab Model of A 1.6 Liter Engine With Experimental Verificati PDFDokumen79 halamanA Matlab Model of A 1.6 Liter Engine With Experimental Verificati PDFManicharanBelum ada peringkat
- Edelbrock Jetting Tunning QuiksilverDokumen8 halamanEdelbrock Jetting Tunning QuiksilverivanchoBelum ada peringkat
- VGF 6-8-12-16 Cyl O&MDokumen276 halamanVGF 6-8-12-16 Cyl O&MJuan RojasBelum ada peringkat
- Parts IR5000-IR6000Dokumen256 halamanParts IR5000-IR6000Watcharapong KesornsombutBelum ada peringkat
- Actuator Data SheetDokumen3 halamanActuator Data SheetPratik Ray ChaudhuryBelum ada peringkat
- 3maintain - 32+45+53CDN - 20100205ADokumen13 halaman3maintain - 32+45+53CDN - 20100205APracetak GwkBelum ada peringkat
- BAC Open Cooling Towers BaltimoreDokumen8 halamanBAC Open Cooling Towers Baltimorekimran80Belum ada peringkat
- STC800Dokumen9 halamanSTC800Amit SinghBelum ada peringkat
- Casar Special Wire RopesDokumen48 halamanCasar Special Wire RopesmarketakisioannisBelum ada peringkat
- SH Cset m151 Front Chainwheel FC-M151Dokumen2 halamanSH Cset m151 Front Chainwheel FC-M151Ingrid VantaBelum ada peringkat