PID
Diunggah oleh
Liliane BrinoHak Cipta
Format Tersedia
Bagikan dokumen Ini
Apakah menurut Anda dokumen ini bermanfaat?
Apakah konten ini tidak pantas?
Laporkan Dokumen IniHak Cipta:
Format Tersedia
PID
Diunggah oleh
Liliane BrinoHak Cipta:
Format Tersedia
Este trabalho uma reviso sobre sintonia de controladores do tipo PID.
. O assunto cada vez mais importante para engenheiros envolvidos com operao, principalmente aps a implantao de controladores preditivos e multivariveis (controle avanado) nas plantas qumicas. Trata-se de um texto introdutrio, que pretende ser fator motivador para um futuro estudo mais aprofundado. As publicaes sobre o assunto so numerosas e aparecem rotineiramente na literatura de Engenharia. Abordam-se alguns mtodos de sintonia tradicionais como os que se baseiam no estudo das oscilaes permanentes do sistema em malha fechada, os mtodos baseados na curva de resposta do processo em malha aberta e os mtodos fundamentados em desempenho timo em malha fechada. Conclui-se com consideraes sobre o valor da experincia prtica (heurstica) como guia para sintonia de controladores. This paper is a PID controller tuning review. Tuning has been increasingly important for operation engineers with multivariable predictive control routinely implemented in most chemical plants. This is supposed to be an introductory text, a first step toward further studying. Tuning is a common subject in most engineering technical publications. Some of the well known tuning methods are reviewed, including those based on closed loop sustained oscillations analysis, the open loop transfer function based ones and some of the optimal performance with closed loop tuning methods. Finally, experienced operator tips on tuning are discussed as they prove to be a good heuristic way to achieve both good performance and stability controllers. Este trabalho es una revisin sobre sintona de controladores del tipo PID. El asunto es cada vez ms importante para ingenieros de operacin, principalmente con control avanzado en las plantas qumicas. Trtase de un texto introductorio, motivador para un futuro estudio ms profundo. Las publicaciones sobre el asunto son numerosas y aparecen rutineramente en la literatura de Ingeniera. Son abordados algunos mtodos de sintona tradicionales como los que se basan en el estudio de las oscilaciones permanentes del sistema, los mtodos basados en la curva de respuesta del proceso y los mtodos fundamentados en desempeo ptimo . Se concluye con consideraciones sobre el valor de la experiancia prctica (heurstica) como gua para sintona de controladores. 1. INTRODUO: IMPORTNCIA DO CONTROLADOR PID Controle de processos um campo do conhecimento de Engenharia. Ele fortemente relacionado operao e instrumentao. A operao, de uma forma abrangente, sempre envolve algum modelo do processo: a prtica da engenharia de modelos de processo. A instrumentao, por sua vez, uma importante rea da engenharia do equipamento, voltada para os dispositivos que permitem realizar a tarefa de regulao do processo. 1 Unidade de Negcios Replan. e-mail: spandri@petrobras.com.br
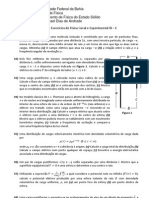
Bol. tc. Petrobras, Rio de Janeiro, 46 (3/4): 383 410, jul./dez., 2003 384 Antigamente, mecanismos fsicos permitiam a implementao de controle com ao sobre uma vlvula para regular alguma propriedade medida do processo, como ilustra o sistema pneumtico da figura 1. Fig. 1 - Controle de temperatura com controlador pneumtico. Fig. 1 - Temperature pneumatic control. O controlador apresentado na figura 1 regula a temperatura de sada de um fluido que passa por um permutador de calor. Para mant-la prxima de um valor desejado, sempre que houver um erro (diferena) entre ele e o valor de temperatura medido, o sistema mecnico desencadear naturalmente ao sobre uma vlvula, abrindo-a ou fechando-a, aumentando ou diminuindo a vazo de gua de refrigerao para o trocador de calor. Essa ao normalmente proporcional ao erro verificado entre o valor desejado e o medido para a propriedade regulada. Trs parcelas so adicionadas: uma de proporcionalidade direta a cada novo erro,
outra de proporcionalidade soma acumulada do erro e uma terceira de proporcionalidade taxa de variao do erro, compondo uma lei de controle denominada proporcional + integral + derivativa (PID) que descreve o comportamento de boa parte dos dispositivos de controle mais simples. Atualmente, com a informatizao da instrumentao, outras leis de controle podem ser codificadas em computadores de diversos portes. Em comparao com a to simples lei PID, nica possvel antigamente, algumas das atuais merecem o nome de leis avanadas de controle, algoritmos de controle avanado. Muitas dessas leis so de fato complexas e so programadas em computadores de maior porte. As leis mais complexas normalmente regem tarefas de uma natureza mais ligada otimizao e superviso. Para tarefas regulatrias mais simples, ainda continua sendo programada nos computadores a antiga e til lei PID. Esse o caso dos controladores que regulam vazes, temperaturas e presses. A configurao final a de um esquema hierarquizado de controladores, com o controle avanado otimizando o processo atravs de atuao sobre uma srie de controladores regulatrios do tipo PID. Tudo muito semelhante a um sistema em cascata: o controle avanado mestre de diversos controladores PID, que dele recebem periodicamente novos set-points (valores desejados). Na figura 2 ilustra-se uma rede de computadores de controle de processo (SDCD), indicando o fluxo hierarquizado de informao: set-point enviado pelo controle avanado e atuao sobre o processo pelo controle regulatrio.
Bol. tc. Petrobras, Rio de Janeiro, 46 (3/4): 383 410, jul./dez., 2003 385 Fig. 2 - Computador de processo com regras de controle avanado supervisiona computador do SDCD (controle regulatrio com lei PID) pelo envio de set-point, otimizando o processo. Fig.2 - Advanced supervisory control: set-points to DCS. O controle avanado inclui diversos parmetros numricos que devem ser ajustados. O controlador regulatrio inclui as trs constantes de proporcionalidade (PID) que devem tambm ser ajustadas. O valor numrico das constantes determina o comportamento dos controladores, alterando-lhes o desempenho. A escolha dos valores deve sempre atender s duas grandes questes de controle: o processo sob controle deve sempre ficar estvel e o desempenho do controlador deve ser satisfatrio. Estes so os dois aspectos que justificam todo o conhecimento da denominada teoria de controle clssico. Sintonizar o controlador significa encontrar valores numricos para as constantes de proporcionalidade de um controlador PID de forma a regular o processo com estabilidade e no valor desejado para a propriedade medida (desempenho satisfatrio). Com o controle avanado, a questo de sintonia do controlador regulatrio fica ainda mais importante, uma vez que o desempenho do controlador PID acaba sendo parte (importante) do desempenho final do controle avanado. 2. MODELO DO PROCESSO O modelo a lei do processo. Usando diagrama de blocos (fig. 3):
Fig. 3 - Diagrama de blocos do processo. Fig. 3 - Process block diagram. representa-se a varivel independente (grau de liberdade) como entrada do processo (u) e a varivel dependente como sada (y). Por exemplo, para uma torre debutanizadora, que separa gs liquefeito (GLP) como produto de topo e gasolina (nafta) como produto de fundo:
Bol. tc. Petrobras, Rio de Janeiro, 46 (3/4): 383 410, jul./dez., 2003 386 u y - refluxo de topo de torre debutanizadora - intemperismo do GLP - carga trmica no refervedor de debutanizadora - PVR da nafta O refluxo uma varivel que influencia o intemperismo do GLP (95% vaporizados no ensaio de vaporizao do produto e que influenciado pela presena de hidrocarbonetos pesados). Sendo usado (manipulado) apropriadamente, pode se tornar um bom grau de liberdade para regular (controlar) o intemperismo. Consideraes anlogas valem para a carga trmica do refervedor no que se refere ao controle (regulao) da PVR da nafta (Presso de Vapor Reid do produto, que influenciada pela presena de hidrocarbonetos leves). O exemplo do anexo I ilustra outro fato importante relacionado ao diagrama de blocos aplicado a controle de processos: as variveis y e u do diagrama de blocos acima esto na forma de desvio em relao a um estado estacionrio do processo. O modelo do processo a lei que expressa a influncia de u sobre y. Nos processos qumicos, essa lei normalmente conseqncia de balano de massa e energia, e acaba sendo expressa por equaes diferenciais do tipo: dp ttuKtydt tdy=+ Pelo fato de essa equao envolver uma derivada primeira, diz-se que os modelos dos processos qumicos so geralmente de primeira ordem. Quando uma variao nica e brusca aplicada na entrada u (variao denominada degrau), a integrao dessa equao fornece a seguinte soluo tpica (fig. 4): Fig. 4 - Resposta (varivel de sada) de processo de primeira ordem a um degrau na varivel de entrada. Fig. 4 - First order process step response. Trs termos so importantes para o modelo:
ganho do processo: expressa quanto se altera a varivel de sada para cada unidade de variao da varivel de entrada. O ganho uma razo, possui unidades e pode ser calculado pela expresso:
Bol. tc. Petrobras, Rio de Janeiro, 46 (3/4): 383 410, jul./dez., 2003 387 tempo morto (td - delay time) o tempo que o processo leva para comear a responder variao em degrau; tempo de primeira ordem () o tempo que o processo demora, uma vez iniciada a variao, para chegar aos 63% da variao total final. Esse nmero 63% conseqncia de uma exponencial que aparece na claro que existem modelos muito mais sofisticados para o processo. Para a maioria das finalidades prticas basta um modelo de primeira ordem com atraso. Processos qumicos podem ser representados por diagrama de blocos como o seguinte (fig. 5): Fig. 5 - Diagrama da funo de transferncia do processo. Fig. 5 Process step transfer function. O ganho e o tempo de primeira ordem aparecem como coeficientes de uma razo denominada funo de transferncia. A varivel s, em ltima anlise, representa a derivada. O tempo morto aparece no bloco imediatamente posterior ao primeiro. Uma vez definidas as variveis de entrada e de sada, o levantamento prtico da funo de transferncia chamado identificao do processo. A maneira mais simples de se levantar a funo de transferncia, ou seja, de se determinarem os valores de Kp, e td (identificar o processo), a de se fazer teste que consiste em: aplicar um degrau na varivel de entrada (u) (fig. 6); Fig. 6 - Teste de aplicao de degrau na entrada do processo. Fig. 6 Step test. registrar a evoluo da varivel de sada (y) no tempo, at estabilizao em novo patamar (fig. 7); Fig. 7 - Resposta do teste de aplicao de degrau na entrada do processo. Fig. 7 Step test results.
Bol. tc. Petrobras, Rio de Janeiro, 46 (3/4): 383 410, jul./dez., 2003 388 ler os termos e td diretamente na abscissa; o termo y lido na ordenada (correspondente ao processo j estabilizado) e utilizado no clculo do ganho Kp. No grfico seguinte (fig. 8) mostra-se uma aplicao prtica em debutanizadora de FCC: Fig. 8 - Caso prtico de teste de aplicao de degrau na entrada do processo (torre debutanizadora). Fig. 8 - Step test for an LPG-naphta fractionator. aumentou-se 400 m3/d na vazo de refluxo de topo da coluna e o intemperismo caiu de 0 para 1.6oC. O ganho do processo, portanto, vale: dm na abscissa pode-se verificar tempo morto de 1 minuto. O tempo de primeira ordem vale 18 minutos, ou seja, iniciado o teste e decorrido o tempo morto de 1 minuto, o intemperismo comea a cair e atinge 0 0.63x1.6 = -1oC aps 18 minutos. Duas observaes finais so importantes sobre modelos de primeira ordem: muitas vezes o ganho normalizado com as faixas (ranges) das variveis envolvidas. Por exemplo, para a torre em questo, um range de vazo de refluxo pode ser de 10000 m3/d e do intemperismo do GLP pode ser de 10 oC. Desse modo, o ganho normalizado vale Kp=-4. os trs parmetros do modelo podem variar conforme as condies operacionais da unidade. Por exemplo, o tempo de primeira ordem est relacionado a um tempo de residncia (relao entre volume do equipamento e vazo de carga): para vazes mais altas, esse tempo diminui (volume constante). O mesmo ocorre para o tempo morto, que muitas vezes est ligado ao volume dos elementos de transporte (tubulaes). Tambm o ganho do processo, que expressa a sensibilidade do mesmo, pode variar conforme o ponto operacional da unidade. 3. PROCESSO COM CONTROLADOR PID A varivel de entrada (u) usada livremente (grau de liberdade) para regular a varivel de sada (y). Esse o princpio que serve de base para o controlador. O diagrama de blocos do processo controlado o seguinte (fig. 9):
Bol. tc. Petrobras, Rio de Janeiro, 46 (3/4): 383 410, jul./dez., 2003 389 Fig. 9 - Diagrama de blocos da funo de transferncia do processo com controlador PID em malha fechada. Fig. 9 - Closed loop block diagram. A informao de entrada para o controlador o erro entre o valor desejado (set-point yd) e o valor real da varivel de sada do processo. O esforo do controlador sempre ser o de diminuir esse erro, mantendo a varivel de sada do processo sob controle, motivo pelo qual ela tambm denominada varivel controlada. A informao de sada do controlador o grau de liberdade do processo, varivel que o controlador vai manipular para manter o processo sob controle. Por esse motivo, a sada do controlador (entrada do processo) chamada varivel manipulada. A lei PID traduz a idia de que a varivel manipulada ser alterada proporcionalmente ao erro que aparece a cada instante, ao acmulo (integral) do erro ao longo do tempo e taxa de variao do erro da varivel controlada, ou seja: d dcd dc u dt tyyd kdttyyk i c udt Aparecendo trs parmetros de sintonia: kc ganho da parte proporcional do controlador i tempo da ao integral do controlador (reset time) d tempo da ao derivativa do controlador (rate) O valor numrico dessas trs constantes deve ser determinado de maneira que o controlador tenha um bom desempenho e nunca introduza instabilidades no processo. Esse o problema de controle clssico, o problema de sintonia do controlador PID. 4. SINTONIA DE CONTROLADORES MTODOS COM MALHA ABERTA O termo malha aberta refere-se ao processo sem a ao do controlador (como se a linha de realimentao do diagrama de blocos do processo controlado estivesse aberta). Alguns mtodos propostos para sintonia de controlador PID baseiam-se apenas nos parmetros do processo (Kp, e td ), no levam em conta o controlador, resultando de uma anlise do processo em malha aberta.
Bol. tc. Petrobras, Rio de Janeiro, 46 (3/4): 383 410, jul./dez., 2003 390 4.1. Mtodo de Cohen e Coon O mtodo proposto por Cohen e Coon resume-se na tabela I: controlador kc i d 12Kt tPd t t td d PID 14 d d d t H trs classes de correlaes: clculo de kc (controlador s proporcional); clculo de kc e i (controlador proporcional e integral); clculo de kc ,ie d (controlador proporcional, integral e derivativo). Para o exemplo da debutanizadora, em que Kp=-4, 18= min e td =1 min, os parmetros recomendados para um controlador seriam (tabela I): controlador kc i d P -4.58 - PI -4.07 2.98 min - PID -6.06 2.40 min 0.36 min
Bol. tc. Petrobras, Rio de Janeiro, 46 (3/4): 383 410, jul./dez., 2003 391 4.2. Mtodo de Ziegler e Nichols (malha aberta) Analogamente, outra proposta de Ziegler e Nichols baseia-se na tabela I:
controlador kc i d P 1 Kdpt PI 09. Kdpt PID 12 Kdpt 2td td 2 Apesar de, rigorosamente, no se aplicar ao sistema do exemplo, usando-se a tabela, obtm-se (tabela IV): controlador kc i d P -4.50 - - PI -4.05 3.3 min - PID -54 2 min 0.5 min Frente aos resultados, fortemente recomendado no se utilizar a tabela para o caso de um controlador PID completo, que inclua ao derivativa. 5. OSCILAES EM SISTEMAS COM MALHA FECHADA Estabilidade e oscilao em processo com controlador PID pode ser analisada com tcnicas de lgebra linear, pela soluo de equaes diferenciais (anexo I). Historicamente, esse ponto de oscilao de sistemas foi estudado atravs de testes prticos com processos.
Bol. tc. Petrobras, Rio de Janeiro, 46 (3/4): 383 410, jul./dez., 2003 392 Diagrama de blocos do processo vazo de refluxo de topo x intemperismo do GLP (fig. 10): Fig. 10 - Diagrama de blocos da funo de transferncia do sistema de topo de debutanizadora com controlador PID em malha fechada. Fig. 10 Fractionator top system closed-loop block diagram.
Esse o caso de aumento no set-point do controlador. A instruo de aumento de um grau no intemperismo do GLP (degrau unitrio no set-point da malha de controle) ser executada pelo controlador de modo diferente, conforme seus parmetros de sintonia. Examinando-se a influncia do ganho proporcional do controlador para um controle apenas proporcional (sem aes integral e derivativa), o desempenho da malha pode ser to diferente quanto mostra-se na figura 1: Fig. 1 - Respostas do sistema de topo de debutanizadora com controle proporcional e diferentes constantes de proporcionalidade kc. Fig. 1 Fractionator top system with proportional-only PID control. Com ganho de controle (kc) baixo para controlador apenas proporcional, a varivel no inteiramente corrigida (aumento de 1oC). A resposta do processo sob controle suave e, estabilizado em novo regime, h um desvio permanente em relao ao valor desejado (fora do set-point: off-set). Aumentando o ganho, o off-set tende a se reduzir. Entretanto, a resposta do processo fica oscilatria. Para aes proporcionais mais intensas, o carter oscilatrio fica mais drstico, a ponto de deixar o processo instvel. H um valor do ganho proporcional que faz as oscilaes ficarem sustentadas (curva oscilatria com amplitude constante) (fig. 12).
Bol. tc. Petrobras, Rio de Janeiro, 46 (3/4): 383 410, jul./dez., 2003 393 Fig. 12 - Respostas do sistema de topo de debutanizadora com controle proporcional e ganho ltimo ku. Fig. 12 Fractionator top system with proportional-only PID control limit case. Esse ganho um limite, denominado ganho ltimo (ku), alm do qual o processo fica instvel. O limiar da condio estvel para a instvel se d, no exemplo, para um ganho ltimo de ku = -7.25. Nessa condio, o perodo de oscilao vale Pu = 4 min. H outra forma de se fazer o processo sob controle oscilar permanentemente, transformando o controlador num rel. Colocam-se limites para sinal de sada do controlador. Essa saturao do sinal de sada protege a planta contra oscilaes de amplitudes muito grandes. Utilizando-se um controle com apenas ao proporcional de ganho elevado e com saturao em seu sinal de sada para a planta, cria-se um controlador on-off que permite estudar a condio de oscilao sustentada de um modo mais seguro para o processo. O diagrama de blocos para o processo refluxo de topo x intemperismo de GLP para essa configurao de controle o seguinte (fig. 13):
Fig. 13 - Diagrama de blocos da funo de transferncia do sistema de topo de debutanizadora com controlador rel (PID de ganho elevado com saturao de sada) em malha fechada. Fig. 13 Fractionator top system with relay control. Utilizando-se um ganho de kc = -100 e restringindo-se a sada do controlador aos limites 2 a +2 (unidades normalizadas de vazo de refluxo de topo), a resposta do sistema a um aumento de 1oC no set-point a seguinte (fig. 14):
Bol. tc. Petrobras, Rio de Janeiro, 46 (3/4): 383 410, jul./dez., 2003 394 Fig. 14 - Respostas do sistema de topo de debutanizadora com controle rel. Fig. 14 Fractionator top system sustained oscillations. Observa-se que, ao limitar o sinal de sada do controlador, a amplitude de variao do sinal de sada do processo menor no regime de oscilaes sustentadas. Isso significa ter-se levado o sistema ao regime de oscilaes contnuas de modo mais seguro. Analogamente ao caso anterior, o perodo de oscilao vale Pu = 4 min. A amplitude de oscilao da varivel y de 0.4185 e a da varivel u de 2 (onda quadrada). 6. SINTONIA DE CONTROLADORES MTODOS COM MALHA FECHADA 6.1. Mtodo de Ziegler e Nichols O princpio dos mtodos baseados em malha fechada o de se trabalhar com margem de segurana, escolhendo para o ganho proporcional um valor suficientemente afastado do ganho limite. Uma margem de segurana tpica pode ser de 50%, ou seja, reduzir o ganho ltimo pela metade, promovendo uma dessintonia do controlador para afast-lo do limiar da instabilidade. Ziegler e Nichols propuseram margens de segurana conforme tabela V. controlador kc i d P 2 uk - - uP Bol. tc. Petrobras, Rio de Janeiro, 46 (3/4): 383 410, jul./dez., 2003 395 H trs classes propostas: clculo de kc (controlador s proporcional); clculo de kc e i (controlador proporcional e integral);
clculo de kc ,ie d (controlador proporcional, integral e derivativo). Para uso da tabela, deve-se conhecer o ganho ltimo (ku) e o perodo da oscilao sustentada (Pu). Para o exemplo discutido, a sintonia resultante da aplicao das margens de segurana de Ziegler e Nichols a seguinte (tabela VI): controlador kc i d P -3.6 - PI -3.3 3.3 min - PID -4.3 2 min 0.5 min 6.2. Mtodo de Astrom No item V foi apresentada uma forma rel do controlador que, acrescida de um limitador do sinal de sada, permite fazer o sistema oscilar com baixas amplitudes. O sinal de sada do controlador forma uma onda quadrada de amplitude d=2 e a sada da planta com amplitude a=0.4185. Um ganho ltimo modificado pode ser estimado pela expresso: a dku4= Como o rel introduz no linearidade no processo, essa expresso uma aproximao que permite estimar um ganho ltimo de ku = -6.1. O perodo de oscilao do sistema foi de 4 min. Com esses dois dados, pode-se aplicar a dessintonizao recomendada na tabela V, obtendo a seguinte sintonia recomendada:
Bol. tc. Petrobras, Rio de Janeiro, 46 (3/4): 383 410, jul./dez., 2003 396 controlador kc i d P -3.0 - PI -2.8 3.3 min - PID -3.6 2 min 0.5 min 7. MTODOS BASEADOS EM DESEMPENHO TIMO COM MALHA FECHADA Outra forma de sintonizar controlador PID consiste em pesquisar valores das constantes kc, ie d que minimizem um erro de desempenho. Um erro de desempenho decorre do fato de que qualquer ajuste promovido por um sistema de controle levar um tempo para se concluir e, ao longo desse tempo, acumulamse erros de controle (valor desejado set-point menos valor medido). No grfico seguinte (fig. 15) mostra-se o desempenho de um controle PID para um aumento de 1oC no intemperismo de GLP (set-point de controlador que manipula vazo de refluxo de topo da torre debutanizadora). Fig. 15 - Erro do controlador PID em aumento de set-point. Fig. 15 - Controller integral error - the set-point increase case. Inicialmente, o controlador reduz a vazo de refluxo de topo. Reduzindo o refluxo, o intemperismo comea a subir. Durante todo o perodo de elevao do intemperismo, segue-se acumulando o erro entre o valor desejado e o real (inferior ao desejado).
No caso apresentado na figura, o controlador est sintonizado para reduzir o refluxo com rapidez, o que leva o intemperismo a ultrapassar o valor desejado (over-shoot). H uma inverso do sinal do erro e o controlador, ento, passa a aumentar o refluxo. Continua-se contabilizando o erro entre o valor desejado e o real (agora superior ao desejado).
Bol. tc. Petrobras, Rio de Janeiro, 46 (3/4): 383 410, jul./dez., 2003 397 As elevaes e redues de refluxo so proporcionais ao erro instantneo e soma acumulada dos erros passados. Essa situao continua at o ajuste final do intemperismo. Para o transiente de ajuste como um todo, pode-se integralizar tambm o valor absoluto ou quadrtico dos erros instantneos, do que resulta um erro acumulado, global, integrado, que depende dos valores das constantes de rapidez de ao do controlador PID (kc ,ie d). Esse erro global denominado integral (soma acumulada) do valor absoluto dos erros instantneos (IAE integral of absolute errors) ou integral (soma acumulada) do valor quadrtico dos erros instantneos (ISE integral of squared errors). H um conjunto de valores para kc ,ie d que minimiza esse erro integrado de simulao. Esses trs valores timos podem ser encontrados simulando o processo vrias vezes (diversos kc ,ie d), conforme algum mtodo de busca numrica do mnimo da funo erro. Essa pesquisa ilustrada a seguir para um controlador tipo PI (permite visualizao grfica e o caso mais comum na prtica) aplicado ao sistema de refluxo de topo de debutanizadora e intemperismo de GLP. Para poder construir grfico ilustrativo, foram levantados resultados de diversas simulaes de desempenho do controlador frente elevao de 1oC no intemperismo do GLP (aumento de set-point). O ISE foi calculado para uma faixa de valores de kc desde 2 a 0.5 e uma faixa de i ckik=desde 0.1 a 0. Na figura 16 mostra-se que existe um mnimo do erro quadrtico acumulado (integrado) para kc = -3.4 e ki = -0.13. Fig. 16 - ISE (integral ou soma do erro quadrtico) para faixa de valores de kc e ki de controlador PI. Fig. 16 - ISE (integral or the sum of the quadratic error) for a range of values of kc and ki in a PI controller. Os valores precisos das duas constantes podem ser pesquisados numericamente. O mtodo utilizado foi o de Marquardt Levenberg, cuja robustez motivou sua seleo dentre as opes de solver disponveis no software Matlab (Optimization Toolbox). O resultado foi: kc = -3.4019 e ki = -0.1297 min-1 primeira vista, esta classe de mtodos muito atraente e, de fato, eles so mtodos criteriosos, cuja investigao vale a pena. Entretanto, cabe refletir sobre duas observaes importantes. 1. O erro acumulado ao longo do tempo inclui parcelas de erros, por assim dizer, mais inevitveis que outros, bem como parcelas de erros mais crticos que outros. Por exemplo, os erros iniciais da figura 15 (mais prximos do instante inicial - tempo zero) so uma fatalidade decorrente da inrcia inicial do sistema, que precisa ser reconduzido para uma nova condio (alterao de set-point). Para tempos maiores, os erros so mais evitveis e devem mesmo ser eliminados, pois sua persistncia pode ser crtica (ou, no mnimo, indesejvel). Constataes desse tipo podem ser levadas em conta atravs de uma funo ponderal que estabelea pesos para uma soma ponderada dos erros acumulados ao longo do tempo: erros iniciais podem ser menos ponderados (maior irrelevncia de erros mais inevitveis) e erros posteriores podem ser mais ponderados (maior criticidade de erros mais corrigveis). A escolha da
Bol. tc. Petrobras, Rio de Janeiro, 46 (3/4): 383 410, jul./dez., 2003 398 funo ponderal bastante particular para o processo e subjetiva do engenheiro que est aplicando este mtodo. Uma proposta comum escolher o prprio tempo como funo ponderal (tempos menores, pesos menores e viceversa), o que conhecido como mtodo de integral (soma acumulada) do valor quadrtico dos erros instantneos ponderados pelo tempo (ITSE integral of time-weighted squared errors). Outras propostas so possveis e essa uma questo aberta. 2. O erro que acumulado refere-se ao valor de varivel de processo em relao a um valor desejado. O caso analisado o de alterao deliberada do valor desejado, ou seja, o caso em que se deseja promover uma migrao do ponto operacional do processo (caso servo-mecanismo, alterao de set-point). Entretanto, o caso mais comum o de controladores atuando para manter o sistema em um ponto operacional definido, rejeitando perturbaes aleatrias a que o processo est sujeito (caso regulatrio, set-points constantes). Esse tipo de atuao aquela a que o controlador est mais sujeito o tempo todo. Neste caso, o critrio de erro da otimizao fica dependendo da forma escolhida para a perturbao, perturbao que, na prtica diria, extremamente aleatria em forma e intensidade. A escolha de uma perturbao tpica tambm bastante particular para o processo e subjetiva do engenheiro. As numerosas propostas possveis fazem dela uma questo aberta. Essas observaes mostram a importncia tanto da experincia prtica para classificao dos erros de controle quanto do conhecimento profundo do processo a ser controlado e das condies a que est tipicamente sujeito. Essa experincia prtica e esse conhecimento do processo formam uma base heurstica fundamental para a tarefa de sintonia de controladores. 8. A ARTE DE SINTONIZAR CONTROLADORES As tcnicas descritas at este ponto tm todas certa fundamentao terica. A classe de mtodos que se baseia na curva de resposta do processo se fundamenta na idia de inverso da soluo da equao diferencial do processo. A classe de mtodos baseados na dessintonizao em relao ao ponto crtico de oscilaes sustentadas foi desenvolvida a partir de critrios precisos sobre a resposta do processo com controlador. Os critrios precisos que podem nortear o desenvolvimento de diferentes mtodos dessa classe se fundamentam na rapidez do sistema (rising time, settling time) ou na extenso do comportamento do sistema (overshoot, decay ratio, offset). Em particular, o mtodo de Ziegler-Nichols foi baseado numa decay ratio conveniente aplicada a um conjunto grande de controladores industriais. Alternativas mais conservativas ou mais agressivas podem ser propostas. Os mtodos baseados em desempenho timo so uma aplicao da idia de pesquisa do mnimo de funes de vrias variveis. H, entretanto, um carter fortemente prtico, heurstico, na tarefa de sintonizar controladores. Esse carter j aparece em alguns itens dos prprios mtodos cientficos, que exigem decises variadas sobre margens de segurana, desempenho requerido do controlador, condies tpicas da planta e erros tolerveis. Mas o carter prtico definidor de toda uma classe de regras de sintonia. Algumas regras prticas j se tornaram clssicas: sempre que possvel, usar controlador apenas proporcional; sempre que possvel, usar valores baixos para ao integral (elevado reset-time); evitar o uso da ao derivativa. No caso de processos qumicos, a ao derivativa fica restrita quase que somente a poucos casos de controle de temperatura, uma vez que essa varivel apresenta normalmente dinmica lenta. Assim mesmo, a ao derivativa usada com extrema parcimnia e com forte filtro na varivel controlada. Na prtica industrial, as malhas de controle com ao derivativa dificilmente ultrapassam 5% do total de malhas da unidade; em controle de nvel, procurar usar apenas ao proporcional e, quando possvel, com banda morta. Esse talvez seja o caso mais comum de sintonia inadequada que se encontra nas plantas qumicas. Ainda muito comum o uso de um controle exagerado de nvel, ou seja, manipular excessivamente vazo de Bol. tc. Petrobras, Rio de Janeiro, 46 (3/4): 383 410, jul./dez., 2003 399 retirada de lquido do fundo de equipamentos (torres, principalmente) para manter o nvel de lquido no fundo excessivamente estvel. Isso pode ser um problema porque, normalmente, o lquido retirado carga de outro equipamento a
jusante. Nesses casos, controle de nvel muito rigoroso em uma parte do processo implica em variao excessiva da carga do outro equipamento, cujo controle fica difcil. Em muitos casos, off-set ou aes muito lentas em controle de nvel no representam grande problema de fato, e a agressividade do controlador de nvel fruto de uma cultura imprpria de operao da planta; em controle de vazo, no usar ao derivativa e usar ao integral atenuada. Outras regras existem, particulares para cada caso. Recordando-se a grande quantidade de controladores mais elaborados que a eletrnica e a informtica viabilizaram nos dias de hoje, percebe-se a ausncia de muitos mtodos cientficos para sintonizar itens comuns como controladores com transies (ao de controle dividida entre vrios atuadores ou chaveamento dentre diversas variveis controladas) e controladores antecipatrios, que usam sempre alguma forma de modelo do processo. Um item importante que ainda hoje fortemente dependente de regras prticas de sintonia o de controle robusto. Como j se comentou, tempos de residncia e ganhos (sensibilidade) do processo variam fortemente e os controladores requerem ressintonia com certa freqncia. Uma forma de atenuar esse retrabalho a de encontrar uma soluo aproximadamente de compromisso para os ajustes do controlador, ou seja, sintonizlo para atender de maneira minimamente satisfatria a uma grande faixa de condies operacionais. As tentativas tericas para soluo desse problema so um esforo em andamento (e bastante, por assim dizer, complexas) e a realidade atual ainda a da prtica de regras particulares, caso a caso, para atender a essa necessidade. Sintonizar controladores uma arte. Parte-se das ferramentas tericas disponveis. Com elas, faz-se o esforo mximo de anlise das diferentes situaes prticas a serem atendidas. Ao final, decretam-se refinamentos oriundos da experincia prtica com o sistema em questo. Essa etapa final importante (em muitos casos a nica disponvel) e deixa claro o lado emprico do assunto. 9. CONCLUSO A maioria das referncias da literatura de controle de processos qumicos ressalta a superioridade dos mtodos cientficos, de base terica, em relao aos mtodos de tentativa e erro para sintonia de controladores. A nossa experincia j to longa na prtica dentro da indstria permite atenuar um pouco a fora dessa afirmao para, um pouco concordando com ela, dela tambm discordar. Os mtodos cientficos so importantes. Eles so fruto de um esforo gigantesco no sentido de tcnicas mais perfeitas, esforo esse que, entre ns, consome recursos de inteligncias brilhantes e idealistas. Seu resultado a grande quantidade de ferramentas hoje disponveis para os tcnicos da indstria. Entretanto, o conhecimento heurstico, que ingenuamente poderia ser rotulado como predisposio tentativa e erro, ainda muito importante. Sintonia um ajuste de sensibilidade, e a sensibilidade desejada e desejvel algo que varia muito no espao e no tempo. Todas as receitas cartesianas e determinsticas so sempre bem acolhidas, mas uma ltima anlise heurstica essencial antes de viabilizar valores a serem carregados num controlador. Essa anlise essencial sob o ponto de vista de desempenho do controlador e sob o ponto de vista de segurana operacional. A extenso de uma automao precisa ser um pouco relativizada com a medida humana, que ainda a medida de todas as coisas. No caso de sintonia de controladores, essa relativizao pode ser feita atravs da compreenso do valor do esforo na cincia de sintonia e tambm do valor inestimvel de uma experincia prtica disponvel e pulverizada pelos rgos operacionais do parque produtivo. O treinamento contnuo da mo-de-obra (propiciando-lhe, inclusive, sempre mais excelncia na cincia de sintonia) e a promoo de uma atuante gerncia do conhecimento (knowledge management) podem ser uma rota interessante para alavancar uma rea que tem carter cientfico mas, sobretudo, carter de uma verdadeira arte. Bol. tc. Petrobras, Rio de Janeiro, 46 (3/4): 383 410, jul./dez., 2003 400 Astrom, K.J., Hagglund, T. PID Controllers. Tuning, Theory and Practice ISA Publications, North Carolina, 1995 Deshpande, P.B. Distillation Dynamics and Control ISA, Research Triangle Park, N.C., 1995
Deshpande, P.B., Ash, R.H. Computer Process Control with Advanced Control Applications ISA Publications, North Carolina, 1988 Luyben, W.L. Process Modeling, Simulation and Control for Chemical Engineers 2nd edition McGraw Hill, New York, 1990 Morari, M, Zafiriou, E. Robust Process Control Prentice-Hall, Englewood Cliffs, N.J., 1989 Skogestad, S. Simple Analytic Rules for Model Reduction and PID Controller Tuning Journal of Process Control, 13 (2003), 291-309 Ziegler, J., Nichols, N. Optimum Settings for PID Controllers Transactions of the ASME, 64 (1942), 759768
Bol. tc. Petrobras, Rio de Janeiro, 46 (3/4): 383 410, jul./dez., 2003 401 A figura seguinte mostra um tanque de aquecimento de uma corrente de lquido. A vazo de sada de lquido no tanque supostamente igual de entrada no tanque. Ti T w (kg/min) ( C)o ( C)oq q (kcal/min) Considerando regime permanente sob o ponto de vista de balano material, o balano de energia pode ser escrito: balano de energia em regime dinmico: (( )V) C CPP dTdt wTTqi=+ balano de energia em estado estacionrio: (( )V)C CPPdTdt A subtrao das duas expresses permite escrever o balano energtico em relao ao estado estacionrio: e fazendo: yTTs= desvio da temperatura do tanque sqqu= desvio do fluxo trmico na serpentina dTTiis= desvio da temperatura de entrada a equao de balano fica:
dy+=PCPCPV)C( ou uywdwdt pwC uyddtdyw redefinindo:
Bol. tc. Petrobras, Rio de Janeiro, 46 (3/4): 383 410, jul./dez., 2003 402 = Vw constante de tempo de primeira ordem u u wCp = varivel "normalizada"
Resulta: dy dt yud+=+ Ou seja, o comportamento dinmico do tanque regido por uma equao diferencial de primeira ordem. Estando o tanque inicialmente em estado estacionrio, a condio inicial da equao dada por: processo deaquecimento yu Quaisquer variaes em d ou u no se propagam instantaneamente para y. H uma funo temporal que vincula a variao de y para alteraes em u ou d. Essa funo temporal soluo da equao diferencial. No anexo I mostram-se algumas das solues mais comuns em controle de processo.
Bol. tc. Petrobras, Rio de Janeiro, 46 (3/4): 383 410, jul./dez., 2003 403 A2.1 Soluo de Equaes Diferenciais Homogneas com Coeficientes Constantes Uma das questes importantes da lgebra linear a de encontrar solues para um vetor em termos de uma base geradora do espao vetorial em questo. Por exemplo, dado um vetor geomtrico em duas dimenses, solues diferentes podem ser obtidas conforme a base do plano que contm o vetor, como mostra-se na figura seguinte. O mesmo vetor r pode ser resolvido em duas parcelas paralelas base do plano que o contm. No primeiro 2211vdvdrrr+=. Os escalares {}21cc e {}2dd referem o mdulo de cada componente do vetor ao mdulo do respectivo componente da base geradora do plano, e so denominados coordenadas do vetor. H outros elementos matemticos que tm comportamento semelhante ao dos vetores geomtricos. Entre os mais importantes desses elementos esto algumas funes de variveis complexas; razovel considerar que essas funes sejam vetores de um espao gerado por funes base. Tambm transformaes lineares como equaes diferenciais lineares e homogneas com coeficientes constantes podem ser vistas como vetor do espao de funes, que deve ser solucionado em termos da base geradora. Para solucionar a equao, basta decomp-la em relao a uma base geradora. A lgebra linear garante que a soluo determinada se a base tiver a mesma dimenso que a ordem da equao diferencial. Assim, uma equao diferencial de segunda ordem pode ser solucionada numa funo (que um vetor) que combina duas funes linearmente independentes (no paralelas). Estas duas funes formam uma base do espao de solues.
Bol. tc. Petrobras, Rio de Janeiro, 46 (3/4): 383 410, jul./dez., 2003 404 Exemplo 1: yd pode ser solucionada em relao a uma base com duas funes linearmente independentes. Sabe-se que as derivadas das funes exponenciais so tambm exponenciais, podendo-se investigar o efeito de se propor uma base do tipo tecomo soluo. Substituindo na equao diferencial: t t eeeeedtdedt ed seja, 1=e 42=. Isso significa que a uma base geradora da soluo da equao diferencial formada pelos vetores no paralelos te, te4. A soluo da equao diferencial pode ser decomposta como: As exponenciais decrescentes da soluo indicam que a soluo assintoticamente decrescente com o tempo, ou seja, estvel.
Exemplo 2: yd , sua equao caracterstica ser Nesse caso, qualquer das exponenciais crescentes da soluo indica que a soluo ilimitadamente crescente como tempo, ou seja, instvel.
Bol. tc. Petrobras, Rio de Janeiro, 46 (3/4): 383 410, jul./dez., 2003 405 Exemplo 3: yd , sua equao caracterstica ser Nesse caso, a soluo envolve uma curva decrescente (exponencial) e oscilatria (termo senoidal), que estvel.
Exemplo 4: yd , procedimento semelhante conduz seguinte soluo:
que envolve curva crescente (exponencial) e tambm oscilatria (termo senoidal), que instvel. Os quatro exemplos mostram que a caracterstica de estabilidade da soluo depende dos coeficientes da equao diferencial. Esses coeficientes so nmeros reais e aparecem no polinmio caracterstico associado equao diferencial. As razes do polinmio aparecem em termos exponenciais: parte real negativa implica em soluo estvel e vice-versa; parte imaginria diferente de zero implica em soluo oscilatria. interessante lembrar que esses coeficientes so sempre combinaes de propriedades do sistema fsico e do controlador. Os exemplos seguintes mostram a importncia das propriedades do sistema e dos parmetros do controlador na obteno de condies estveis e pouco oscilatrias.
Bol. tc. Petrobras, Rio de Janeiro, 46 (3/4): 383 410, jul./dez., 2003 406 A 2.2. Soluo da Equao de um Sistema Fsico sem Controle (malha aberta) Os sistemas qumicos, regidos por balanos de massa e energia, so representados por equaes diferenciais de primeira ordem, com atraso da sada em relao entrada. Ou seja, a equao diferencial associada aos mesmos do tipo: Num sistema sem controle, aplicando um degrau unitrio na entrada, ou seja: Substituindo o termo u(t), para t>0 a equao diferencial escrita como: psdd pdd Kytty ttdytuKtty Derivando a equao, obtm-se uma equao homognea: 1 2 ttyd d Aplicada ao instante inicial (t=0), a expresso fornece: 21ccys+=. Longo tempo aps a perturbao
A soluo , portanto:
Bol. tc. Petrobras, Rio de Janeiro, 46 (3/4): 383 410, jul./dez., 2003 407 A2.3. Soluo da Equao de um Sistema Fsico com Controle Proporcional (malha fechada) Um sistema de primeira ordem sob atuao de controlador PID pode ser representado pelas seguintes equaes: dt tdyp=+ para um controlador apenas proporcional. As duas expresses podem ser combinadas, resultando: tdy SPcpsp Num sistema com controle, aplicando um degrau unitrio no set-point, ou seja: Substituindo o termo SPy, para t>0 a equao diferencial escrita como: Derivando a equao, obtm-se uma equao homognea: cpcp kKdt tdykKdt tyd tckpK cp ecctykK
Aplicada ao instante inicial (t=0), a expresso fornece: 21ccys+=. Longo tempo aps a perturbao degrau, estabilizado o processo, o novo estado estacionrio aplicado expresso cp st kK cp cp cp cp s kK kK c kK
Bol. tc. Petrobras, Rio de Janeiro, 46 (3/4): 383 410, jul./dez., 2003 408 A soluo , portanto: tckpK e kK kK yty Esse resultado mostra que um controlador proporcional no completa integralmente a solicitao de aumento de set-point. O aumento solicitado foi de uma unidade. Entretanto, para ts tem-se aumento de uma unidade no caso de o ganho kc ser muito elevado, de modo que cp cp kt kK
Bol. tc. Petrobras, Rio de Janeiro, 46 (3/4): 383 410, jul./dez., 2003 409 A2.4. Soluo da Equao de um Sistema Fsico com Controle Proporcional e Integral A soluo do item anterior mostra que o aumento solicitado de set-point no completado integralmente. O controlador proporcional permite certo aumento da varivel y, restando uma parte no atingida denominada off-set (fora do set-point). Para resolver o problema de off-set, ou seja, de um erro permanente que resta entre o set-point e o valor medido para y, pode-se acrescentar lei de controle uma parcela proporcional soma do erro persistente (acumulado, integral do erro).
Um sistema de primeira ordem sob controle de lei proporcional e integral regido pelas expresses: SPk SPcs t k cs dttyytyykudttetekutu ici c As duas expresses podem ser combinadas, resultando: pSPcpsp dttyyKtyykKuKtydt tdy i t Kk cp dtyykKuKdttytykKdt tdy pc Num sistema com controle, aplicando um degrau unitrio no set-point, ou seja: Substituindo o termo SPy, para t>0 a equao diferencial escrita como: cpt s scp tkKdtytyytykKdt tdy i pc+=+++ Derivando a equao para eliminar a parcela integral: cpKk cp y tydt tdykKdt tyd i pc
Bol. tc. Petrobras, Rio de Janeiro, 46 (3/4): 383 410, jul./dez., 2003 410 A presena da parcela integral do controlador faz com que a equao diferencial que rege o sistema controlado seja de segunda ordem. H um aumento de ordem, pois o sistema sem controle de primeira ordem e o sistema sob controle de ordem dois. Derivando novamente para obter equao homognea: tdy dt tydkK dt tyd i pc Kk cp pcKk cpkK A soluo da equao caracterstica para esse caso depende dos valores atribudos s constantes kc e i. Para cp eCeCCy kK cpKk cp y tydt tdykKdt tyd resulta em: 1)(+=st yty Esse resultado matemtico mostra que no existe off-set para um controlador proporcional e integral. Dependendo do valor do discriminante da equao caracterstica, a soluo pode ter termos trigonomtricos (razes complexas) ou no, o que define o carter oscilatrio do sistema sob controle
Anda mungkin juga menyukai
- A Yoga de Jesus Cristo - YoganandaDokumen9 halamanA Yoga de Jesus Cristo - YoganandaLorenzo Bazzotti100% (3)
- Meu Catecismo Infantil IlustradoDokumen82 halamanMeu Catecismo Infantil IlustradoReinaldo de Souza100% (6)
- Inspetor de QualidadeDokumen0 halamanInspetor de QualidadeRicardo OverhawBelum ada peringkat
- ROTEIRO - Técnica, Pensamento, Paideía - Uma Meditação CairológicaDokumen3 halamanROTEIRO - Técnica, Pensamento, Paideía - Uma Meditação CairológicaCássia Mayssa100% (3)
- Resumo DalgalarondoDokumen38 halamanResumo DalgalarondoMarta EliniBelum ada peringkat
- A Idade Do Aprendiz MaçomDokumen3 halamanA Idade Do Aprendiz MaçomFabioBelum ada peringkat
- A Posicao Fobica Central - GreenDokumen22 halamanA Posicao Fobica Central - GreenRacheçBelum ada peringkat
- 02 - Reich e BiodançaDokumen11 halaman02 - Reich e BiodançaGeraldo Natanael100% (1)
- O Fundamentalismo Ateu Contra Fundamentalismo Religioso - Scott Randall Paine - PUC - MGDokumen18 halamanO Fundamentalismo Ateu Contra Fundamentalismo Religioso - Scott Randall Paine - PUC - MGJuan Carlos FernandesBelum ada peringkat
- Sobre Os Florais Do DesertoDokumen27 halamanSobre Os Florais Do DesertoMarcio Reinaldo Friedrich Costa100% (1)
- Administração de CooperativasDokumen103 halamanAdministração de CooperativasIolanda Santos100% (1)
- 1 Atividade - RESENHA LIVRO COMO LER UM TEXTO DE FILOSOFIADokumen3 halaman1 Atividade - RESENHA LIVRO COMO LER UM TEXTO DE FILOSOFIARafael MaiaBelum ada peringkat
- Fuzzy 2018 - 2 PDFDokumen28 halamanFuzzy 2018 - 2 PDFAlex FerreiraBelum ada peringkat
- Contra A Desautorização, o Reconhecimento. Por Maria Elisa Pessoa LabakiDokumen6 halamanContra A Desautorização, o Reconhecimento. Por Maria Elisa Pessoa LabakiPsicossomática Psicanalítica I. Sedes SapientiaeBelum ada peringkat
- O Papel Da Mulher Na Grécia AntigaDokumen6 halamanO Papel Da Mulher Na Grécia AntigaNadinaBelum ada peringkat
- Lista de Exercicios - Campo Eletrico Lei de Gauss Potencial EletricoDokumen2 halamanLista de Exercicios - Campo Eletrico Lei de Gauss Potencial EletricoJuly Souza100% (1)
- O Papel Do Professor Na Pós-Modernidade: Revista EDUC-Faculdade de Duque de Caxias/Vol. 01-Nº 03/Jan-Jun 2015Dokumen12 halamanO Papel Do Professor Na Pós-Modernidade: Revista EDUC-Faculdade de Duque de Caxias/Vol. 01-Nº 03/Jan-Jun 2015Ronildo Rodrigues SilvaBelum ada peringkat
- Apostila de Desenho Técnico Mecânico PDFDokumen13 halamanApostila de Desenho Técnico Mecânico PDFDaiane MarquesBelum ada peringkat
- A Arte de Curar Pela Homeopatia de Samuel HahnemannDokumen8 halamanA Arte de Curar Pela Homeopatia de Samuel HahnemannLuciana Madsen FerrãoBelum ada peringkat
- A Necessária Renovação Do Ensino de CiênciasDokumen3 halamanA Necessária Renovação Do Ensino de CiênciasKelly AnneBelum ada peringkat
- 4 - Concepção de AdolescênciaDokumen19 halaman4 - Concepção de Adolescênciajorge_victor_1Belum ada peringkat
- Bruno SchiavoDokumen136 halamanBruno SchiavoGabriel RamosBelum ada peringkat
- Administração Por Objetivos - APO 08-11-11Dokumen15 halamanAdministração Por Objetivos - APO 08-11-11profjazonpreiraBelum ada peringkat
- 27 Razões para Não Ser Católico - Docx Resposta Ao ProtestanteDokumen6 halaman27 Razões para Não Ser Católico - Docx Resposta Ao Protestantelucio wellington batistaBelum ada peringkat
- Cuidados para CDC - PCFDokumen96 halamanCuidados para CDC - PCFDayane DelmondesBelum ada peringkat
- OraçõesDokumen12 halamanOraçõesrafael da silvaBelum ada peringkat
- Os Paradigmas 4e's Da Gestão PúblicaDokumen14 halamanOs Paradigmas 4e's Da Gestão PúblicaJeancarlo BortoncelloBelum ada peringkat
- História Dos Hábitos Alimentares OcidentaisDokumen18 halamanHistória Dos Hábitos Alimentares OcidentaisMarianaBelum ada peringkat
- Lição 10 Jesus Renova As Esperanças de João BatistaDokumen10 halamanLição 10 Jesus Renova As Esperanças de João BatistaFabio NoronhaBelum ada peringkat
- Confraria Do Java: Relato de Experiência de Um Grupo de Estudos de Linguagem de ProgramaçãoDokumen10 halamanConfraria Do Java: Relato de Experiência de Um Grupo de Estudos de Linguagem de ProgramaçãoKaren Selbach BorgesBelum ada peringkat