Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- 1996-2001 Fuso FH Service Manual PDFDokumen1.652 halaman1996-2001 Fuso FH Service Manual PDFoutback_fred100% (4)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Project Report On SS Tube MillDokumen8 halamanProject Report On SS Tube MillEIRI Board of Consultants and Publishers0% (1)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Em - 1110 2 2104Dokumen75 halamanEm - 1110 2 2104Mohd BilalBelum ada peringkat
- Overall DimensionDokumen1 halamanOverall DimensionjanetBelum ada peringkat
- Designing Joists With End Moments - Updated 05-09Dokumen14 halamanDesigning Joists With End Moments - Updated 05-09amokhtaBelum ada peringkat
- Swimming EquipmentsDokumen45 halamanSwimming EquipmentsHaymanAHMEDBelum ada peringkat
- IRN 15 18.5 KW (20 25 HP) IRN 22 30 KW (30 40 HP) : Operation and Maintenance ManualDokumen172 halamanIRN 15 18.5 KW (20 25 HP) IRN 22 30 KW (30 40 HP) : Operation and Maintenance ManualNikolay VelchevBelum ada peringkat
- Common Rail System Diesel Engine Technology PDFDokumen26 halamanCommon Rail System Diesel Engine Technology PDFFedima100% (1)
- Piper Lance II - Turbo Lance II-Maintenance - smv1986Dokumen568 halamanPiper Lance II - Turbo Lance II-Maintenance - smv1986willkobiBelum ada peringkat
- Gasitaly f1 Eng ManualDokumen13 halamanGasitaly f1 Eng ManualSekson Junsukpluk50% (2)
- BCM Capacity ChartDokumen1 halamanBCM Capacity ChartKrishnaKumar BangaruBelum ada peringkat
- Wind Analysis (Print)Dokumen43 halamanWind Analysis (Print)Limwell AquinoBelum ada peringkat
- Helicoil GB 0180Dokumen40 halamanHelicoil GB 0180MamdouhAlhanafyBelum ada peringkat
- Thermodynamics: AllenDokumen9 halamanThermodynamics: AllenronakBelum ada peringkat
- Techniques For Obstacle Avoidance in Mobile RoboticsDokumen7 halamanTechniques For Obstacle Avoidance in Mobile RoboticsHarold Geovanny Flores CardenasBelum ada peringkat
- Electric Feed Systems For Liquid Propellant Rocket Engines PDFDokumen178 halamanElectric Feed Systems For Liquid Propellant Rocket Engines PDFandradesosBelum ada peringkat
- Is.7396.1.1985 Surge Shaft DesignDokumen26 halamanIs.7396.1.1985 Surge Shaft DesignVanu Vamalai100% (1)
- D2 Tool Steel - Heat Treatment Process PDFDokumen3 halamanD2 Tool Steel - Heat Treatment Process PDFGayathriRajasekaranBelum ada peringkat
- Conveyor BeltDokumen31 halamanConveyor BeltsmendozaBelum ada peringkat
- HydrantDokumen18 halamanHydrantNhat CaoBelum ada peringkat
- Enerpac E325e GB PDFDokumen224 halamanEnerpac E325e GB PDFrudiBelum ada peringkat
- Repair Manual ZF 63 Iv - ZF 80 Iv - ZF 80-1 Iv - ZF 85 IV Code 310.01.0009hDokumen110 halamanRepair Manual ZF 63 Iv - ZF 80 Iv - ZF 80-1 Iv - ZF 85 IV Code 310.01.0009hEdwin Enrique OsorioBelum ada peringkat
- Characteristics of DC Motor: 1. Torque-Armature Current CharacteristicsDokumen8 halamanCharacteristics of DC Motor: 1. Torque-Armature Current CharacteristicsBilbo BagginsBelum ada peringkat
- BTech 1st Sem: Mechanical Science: Stress & StrainDokumen10 halamanBTech 1st Sem: Mechanical Science: Stress & StrainTechno India Group100% (1)
- Thermo Dyanmics 2Dokumen2 halamanThermo Dyanmics 2xcalliber404Belum ada peringkat
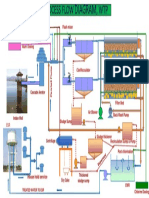
- WTP Process DiagramDokumen1 halamanWTP Process DiagramKumar AbhishekBelum ada peringkat
- Ford Expedition 2017 Ecobost 3.5 V6Dokumen9 halamanFord Expedition 2017 Ecobost 3.5 V6Gaston YTBelum ada peringkat
- Strength of Materials 4th Edition by Pytel and Singer CompressDokumen10 halamanStrength of Materials 4th Edition by Pytel and Singer CompressJohn Carlo EdejerBelum ada peringkat
- Deformation ProcessDokumen25 halamanDeformation Processutpal singhaBelum ada peringkat
- "Don't Be A Normie, I Guess": Invisible MechanicsDokumen30 halaman"Don't Be A Normie, I Guess": Invisible Mechanicssameeryad72Belum ada peringkat