Anda mungkin juga menyukai
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Thesis Uninterrupted Power SupplyDokumen4 halamanThesis Uninterrupted Power Supplynadugnlkd100% (2)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Mini Project Report IRABDokumen10 halamanMini Project Report IRABNaveenkondi100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Instructor's or Course Coordinator's Name: Harpreet SinghDokumen3 halamanInstructor's or Course Coordinator's Name: Harpreet SinghNandini GuptaBelum ada peringkat
- Report 10128783605703828058Dokumen4 halamanReport 10128783605703828058JESUSBelum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Daftar-Harga-Fire-Alarm-Addressable-ASENWARE-Diskon-20-Jan-2021 Endless JakartaDokumen2 halamanDaftar-Harga-Fire-Alarm-Addressable-ASENWARE-Diskon-20-Jan-2021 Endless JakartaMuliawan TjandraBelum ada peringkat
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Dynapower 100kW BiDirectional Inverter PDFDokumen2 halamanDynapower 100kW BiDirectional Inverter PDFRahadian AkbarBelum ada peringkat
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Power InverterDokumen10 halamanPower Inverterdakshina656087100% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Alpina CatalogueDokumen36 halamanAlpina CatalogueBabaBelum ada peringkat
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
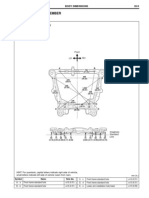
- Suspension Crossmember: Body Dimensions DI-9Dokumen1 halamanSuspension Crossmember: Body Dimensions DI-9diemnganBelum ada peringkat
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Coumputer History PDFDokumen4 halamanCoumputer History PDFFurqan AfzalBelum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- MR ToolsDokumen1 halamanMR ToolsSainiRahulBelum ada peringkat
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- 2008-2009 GM Magna Transfer Case Detailed Info, Bulletin # 1226Dokumen10 halaman2008-2009 GM Magna Transfer Case Detailed Info, Bulletin # 1226davidBelum ada peringkat
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- FMCO-CVHB-HSE-GEN-FRM-005 - Rev-01 - Hand Tools Inspection FormDokumen1 halamanFMCO-CVHB-HSE-GEN-FRM-005 - Rev-01 - Hand Tools Inspection Formenjazco.rsgBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- Measure of Pump Efficiency, Head and DischargeDokumen15 halamanMeasure of Pump Efficiency, Head and DischargeHaikal HarithBelum ada peringkat
- Project Guide: Asim Mukherji Lectrurer, ECE, MNNITDokumen18 halamanProject Guide: Asim Mukherji Lectrurer, ECE, MNNITashu1ashuBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Expression 1640XL PDFDokumen13 halamanExpression 1640XL PDFfefotroncitoBelum ada peringkat
- Electricity CostDokumen2 halamanElectricity Costinfinite onlineBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Bridgetek Pte LTD: BT817/8 Advanced Embedded Video Engine DatasheetDokumen61 halamanBridgetek Pte LTD: BT817/8 Advanced Embedded Video Engine Datasheet李江Belum ada peringkat
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Bi-Polar Stepper Motor DriverDokumen2 halamanBi-Polar Stepper Motor DriverbatranuuBelum ada peringkat
- Basic Components of ElectronicsDokumen77 halamanBasic Components of ElectronicshardzoneBelum ada peringkat
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Light Axle Parts For Jeep Applications: June 2011 Supersedes X510-6 Dated August 2005Dokumen120 halamanLight Axle Parts For Jeep Applications: June 2011 Supersedes X510-6 Dated August 2005Aguss SalimBelum ada peringkat
- MWE-9501 - Manual de Serviço (EN) (2004.10)Dokumen72 halamanMWE-9501 - Manual de Serviço (EN) (2004.10)Thiago AzevedoBelum ada peringkat
- From To Load Details Cable Type Sizing For Short Circuit Sizing For Current Rating Voltage Drop CalculationDokumen36 halamanFrom To Load Details Cable Type Sizing For Short Circuit Sizing For Current Rating Voltage Drop CalculationmagycBelum ada peringkat
- Ph27000Pri Engine (157F) : Valve Cover AssyDokumen3 halamanPh27000Pri Engine (157F) : Valve Cover AssyAriel Rodrigo MuñozBelum ada peringkat
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- GEI-100547-EX2100 and EX2100e ExcitationControl Factory Testsand Demonstrations Instruction GuideDokumen12 halamanGEI-100547-EX2100 and EX2100e ExcitationControl Factory Testsand Demonstrations Instruction GuideLê Trung DũngBelum ada peringkat
- SmartLine020-4 CoP 0051-CPR-1413 20181121 EN PDFDokumen2 halamanSmartLine020-4 CoP 0051-CPR-1413 20181121 EN PDFDiego GodinesBelum ada peringkat
- Rubrics in IroningDokumen1 halamanRubrics in IroningJONALYN GASPARBelum ada peringkat
- E16A358-Manual EN Rev00 2014 06 03Dokumen100 halamanE16A358-Manual EN Rev00 2014 06 03phuc nguyenBelum ada peringkat
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Manual Motores Do Ferro Velho SanyoDokumen64 halamanManual Motores Do Ferro Velho SanyoanclamixBelum ada peringkat
- Ee - Module 3 - April 2012Dokumen3 halamanEe - Module 3 - April 2012Znevba Quintano100% (2)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)