Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Forecasting of Solar Power Ramp Events A Post-Processing Approach - Mohamed Abuella 2018Dokumen27 halamanForecasting of Solar Power Ramp Events A Post-Processing Approach - Mohamed Abuella 2018mhdellaBelum ada peringkat
- Time Event Location Notes Friday, April 10: ND ND ND NDDokumen1 halamanTime Event Location Notes Friday, April 10: ND ND ND NDmhdellaBelum ada peringkat
- Test Graphic PDFDokumen1 halamanTest Graphic PDFmhdellaBelum ada peringkat
- SVM Tutorial 2003 PDFDokumen24 halamanSVM Tutorial 2003 PDFmhdellaBelum ada peringkat
- ANN-Advances in Forecasting With Neural Networks Empirical Evidence From The NN3 Competition On Time Series PredictionDokumen26 halamanANN-Advances in Forecasting With Neural Networks Empirical Evidence From The NN3 Competition On Time Series Predictiondjtere2Belum ada peringkat
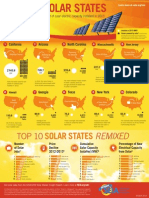
- Top 10 Solar States 1page PDFDokumen1 halamanTop 10 Solar States 1page PDFmhdellaBelum ada peringkat
- A Realizable Renewable Energy FutureDokumen3 halamanA Realizable Renewable Energy FuturemhdellaBelum ada peringkat
- Smart Forecasts Lower The Power of Wind and Solar - MIT Technology ReviewDokumen4 halamanSmart Forecasts Lower The Power of Wind and Solar - MIT Technology ReviewmhdellaBelum ada peringkat
- Buck Avg ClassDokumen1 halamanBuck Avg ClassmhdellaBelum ada peringkat
- Earth's Future EV Wind SolarDokumen7 halamanEarth's Future EV Wind SolarmhdellaBelum ada peringkat
- Jay Whitacre 2013 EESAT Presentation 3Dokumen25 halamanJay Whitacre 2013 EESAT Presentation 3mhdellaBelum ada peringkat
- Microcalc PDFDokumen297 halamanMicrocalc PDFScar TedBelum ada peringkat
- Assessing Eigen Value SensitivitiesDokumen8 halamanAssessing Eigen Value SensitivitiesmhdellaBelum ada peringkat
- IEEEtran HOWTODokumen22 halamanIEEEtran HOWTOVivek MohanBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Sinusoidal Steady State Power Calculations: Assessment ProblemsDokumen54 halamanSinusoidal Steady State Power Calculations: Assessment ProblemsSantiago LeonBelum ada peringkat
- M6 Manual V1.0Dokumen38 halamanM6 Manual V1.0joehowBelum ada peringkat
- Lincoln Invertec - v160 Service Manual 1Dokumen60 halamanLincoln Invertec - v160 Service Manual 1PIKO MOB100% (2)
- FL7M SDokumen4 halamanFL7M SKapilkoundinya NidumoluBelum ada peringkat
- RWC62/62U: Technical InstructionsDokumen16 halamanRWC62/62U: Technical InstructionsramonmartinezcatalaBelum ada peringkat
- Micro Controller Based Automatic Selector For Multiple Ac SouDokumen70 halamanMicro Controller Based Automatic Selector For Multiple Ac SouChidiebere Samuel OkogwuBelum ada peringkat
- Digital MultimeterDokumen9 halamanDigital MultimeterJon HimesBelum ada peringkat
- MID220 Volvo FH Tachograph Fault Codes PDFDokumen12 halamanMID220 Volvo FH Tachograph Fault Codes PDFfrank mutaleBelum ada peringkat
- Report InternDokumen70 halamanReport Interntilahun habte100% (2)
- SCANIA TCO Fault Codes DTCDokumen12 halamanSCANIA TCO Fault Codes DTCfrank mutaleBelum ada peringkat
- Hantek LCR Hantek1833C Manual PDFDokumen32 halamanHantek LCR Hantek1833C Manual PDFJuan Ramírez100% (1)
- Electronic QuestionsDokumen2 halamanElectronic QuestionsBidisha talukdarBelum ada peringkat
- Edplc MCQ QuesDokumen5 halamanEdplc MCQ Quesbhav tech vinesBelum ada peringkat
- Experion MXDokumen170 halamanExperion MXLuiz PipinoBelum ada peringkat
- TRANSISTOR - IntroductionDokumen32 halamanTRANSISTOR - IntroductionAman AhamadBelum ada peringkat
- Sodick Edm Mk25manualDokumen210 halamanSodick Edm Mk25manualNguyen Anh Tu73% (11)
- Charge Reversal of Surfaces in Divalent Electrolytes: The Role of Ionic Dispersion InteractionsDokumen7 halamanCharge Reversal of Surfaces in Divalent Electrolytes: The Role of Ionic Dispersion InteractionsFaustoCamachoBelum ada peringkat
- Annex IV - A - LABORATORY Requirements For Chem and PhysicsDokumen8 halamanAnnex IV - A - LABORATORY Requirements For Chem and PhysicspicefeatiBelum ada peringkat
- Chemistry ReportDokumen4 halamanChemistry ReportDikshaBelum ada peringkat
- TTP 224Dokumen10 halamanTTP 224Sarah Joy ManimtimBelum ada peringkat
- Allied PhysicsDokumen9 halamanAllied PhysicsJostin Punnassery50% (4)
- Serv Manual CARDIFF T1 R22 Big Duct TypeDokumen86 halamanServ Manual CARDIFF T1 R22 Big Duct Typerobmeier100% (1)
- SR 3411Dokumen3 halamanSR 3411Mauricio BalletBelum ada peringkat
- Weber's Electric Force, A Fascinating Electrodynamics (Revised)Dokumen18 halamanWeber's Electric Force, A Fascinating Electrodynamics (Revised)George Mpantes mathematics teacher100% (1)
- Digital Electronics ProjectDokumen13 halamanDigital Electronics ProjectET201040 Mohin UddinBelum ada peringkat
- Magnetism in SolidsDokumen11 halamanMagnetism in SolidsNeelam KapoorBelum ada peringkat
- Planta Cummins MDKDDokumen2 halamanPlanta Cummins MDKDColor XpressBelum ada peringkat
- Coil-Lock ... Hold-in-Device: From Power Quality Solutions IncDokumen2 halamanCoil-Lock ... Hold-in-Device: From Power Quality Solutions IncAUGUSTA WIBI ARDIKTABelum ada peringkat
- Ava 5546 ExcDokumen4 halamanAva 5546 ExcTin Min NaingBelum ada peringkat
- Iaetsd-Jaras-Implementation of Uwb Micro-Strip Antenna WithDokumen6 halamanIaetsd-Jaras-Implementation of Uwb Micro-Strip Antenna WithiaetsdiaetsdBelum ada peringkat