Anda mungkin juga menyukai
- Cálculo de Un Transformador Monofásico de Pequeña PotenciaDokumen2 halamanCálculo de Un Transformador Monofásico de Pequeña PotenciaGonzalo CurielBelum ada peringkat
- Acopladores Direccionales - Anillo HibridoDokumen20 halamanAcopladores Direccionales - Anillo HibridoPAPOFULEBelum ada peringkat
- Generador de Onda A Partir de Amplificadores OperacionalesDokumen4 halamanGenerador de Onda A Partir de Amplificadores OperacionalesDarwin Zuñiga MuegesBelum ada peringkat
- Lab. Control y Automatización 06 - 2020Dokumen9 halamanLab. Control y Automatización 06 - 2020123456579Belum ada peringkat
- Funcion de TransferenciaDokumen32 halamanFuncion de TransferenciaSilvia VrBelum ada peringkat
- Criterio de NyquistDokumen2 halamanCriterio de NyquistWillian Bendezu QuispeBelum ada peringkat
- Prueba de Corto Circuito - Perdidas en El CobreDokumen7 halamanPrueba de Corto Circuito - Perdidas en El CobreYuler Eugenio MamaniBelum ada peringkat
- Diseño de compensador en adelanto en MatlabDokumen5 halamanDiseño de compensador en adelanto en MatlabEdwinAlbertoHernandezQuiramaBelum ada peringkat
- Circuitos FasoresDokumen53 halamanCircuitos FasoresEvy bcBelum ada peringkat
- Control AvanzadoDokumen7 halamanControl AvanzadoJhon Riveros IgnacioBelum ada peringkat
- Cad Examen006 PDFDokumen2 halamanCad Examen006 PDFBAYRON0% (1)
- Problemas de Control AutomaticoDokumen7 halamanProblemas de Control AutomaticoJose Carlos Huaman DonayreBelum ada peringkat
- Informe de Practica5Dokumen21 halamanInforme de Practica5Bryan Mdlo100% (1)
- Informe Lab1 SensoresDokumen16 halamanInforme Lab1 SensoresGuillermo BautistaBelum ada peringkat
- Rectificador de Media y Onda CompletaDokumen15 halamanRectificador de Media y Onda Completagynna32100% (3)
- Características de Un TransformadorDokumen5 halamanCaracterísticas de Un TransformadorLaura FlorezBelum ada peringkat
- Simulación modulación AM: señales, índice modulación y espectrosDokumen5 halamanSimulación modulación AM: señales, índice modulación y espectrosdavid bedoyaBelum ada peringkat
- Jacobiano y SingularidadesDokumen9 halamanJacobiano y SingularidadesDanielaBelum ada peringkat
- Efecto WindupDokumen1 halamanEfecto WindupJosé Arturo100% (1)
- Analisis de Respuesta TransitoriaDokumen9 halamanAnalisis de Respuesta TransitoriaJesús Castrillón ValenciaBelum ada peringkat
- Cinematica Inversa MatlabDokumen2 halamanCinematica Inversa MatlabRonald Butron SalvatierraBelum ada peringkat
- 3.circuito RC Con Fuente Senoidal y Carga Almacenada en El CapacitorDokumen8 halaman3.circuito RC Con Fuente Senoidal y Carga Almacenada en El CapacitorFernando RojasBelum ada peringkat
- EJERCICIOSDokumen3 halamanEJERCICIOSyan09mek0% (1)
- 7 VillaDokumen10 halaman7 VillaCarlos BuenBelum ada peringkat
- Informe de Electronica de Potencia n1 1Dokumen8 halamanInforme de Electronica de Potencia n1 1SergioAugustoBaldeonBelum ada peringkat
- Ejercicio de Aplicacion-TDokumen5 halamanEjercicio de Aplicacion-TErick ChavezBelum ada peringkat
- Generador de Corriente DependienteDokumen7 halamanGenerador de Corriente DependienteXGlvezBelum ada peringkat
- 5 Voltimetro LuminosoDokumen5 halaman5 Voltimetro LuminosoTegui RossBelum ada peringkat
- Servomotores de Corriente ContinuaDokumen13 halamanServomotores de Corriente ContinuaYonathan MirakianBelum ada peringkat
- Contador BCD en VHDL de 0 To 999Dokumen7 halamanContador BCD en VHDL de 0 To 999gabriel pachecoBelum ada peringkat
- Convolución Lineal Discreta y Convolución Circular (Paper)Dokumen4 halamanConvolución Lineal Discreta y Convolución Circular (Paper)William López100% (1)
- Compensadores en Atraso Usando El Método de RespuestaDokumen15 halamanCompensadores en Atraso Usando El Método de RespuestaLuis RCBelum ada peringkat
- Informe Final 2 PotenciaDokumen4 halamanInforme Final 2 PotenciaJorge MoreBelum ada peringkat
- Circuito de DisparoDokumen3 halamanCircuito de DisparoCebaz RivadeneiraBelum ada peringkat
- Filtro Bessel de 5ta orden activoDokumen4 halamanFiltro Bessel de 5ta orden activoJoe BenitesBelum ada peringkat
- COMO SINTONIZAR BOBINA TESLADokumen7 halamanCOMO SINTONIZAR BOBINA TESLARolling76Belum ada peringkat
- Senoides y FasoresDokumen14 halamanSenoides y FasoresSamir SalazarBelum ada peringkat
- Disparo Lineal de TiristoresDokumen13 halamanDisparo Lineal de TiristoresRaul CarrilloBelum ada peringkat
- Diseño de Disparo de Un SCR Con R-CDokumen6 halamanDiseño de Disparo de Un SCR Con R-Cpaco_tunBelum ada peringkat
- Lab 6 Cto Digital. - Sumador y SubtractorDokumen15 halamanLab 6 Cto Digital. - Sumador y SubtractorGuillermo Andres Leaño0% (1)
- El Factor Humano y Las Máquinas CDokumen4 halamanEl Factor Humano y Las Máquinas CLeliz Crispin100% (2)
- Control de Un Servomecanismo Con Motor DCDokumen5 halamanControl de Un Servomecanismo Con Motor DCAlex Jr SullnBelum ada peringkat
- Cargador de Baterias Circuito y Partes.Dokumen12 halamanCargador de Baterias Circuito y Partes.UniElectronicaBelum ada peringkat
- Circuito codificador de prioridad 16-4Dokumen11 halamanCircuito codificador de prioridad 16-4Luis FelipeBelum ada peringkat
- TALLER Transformadores y Sistemas TrifasicosDokumen6 halamanTALLER Transformadores y Sistemas Trifasicoscristian garcia arevalo0% (1)
- TroceadoresDokumen20 halamanTroceadoresAmilcar Alvarez PeraltaBelum ada peringkat
- Control SecuencialDokumen17 halamanControl Secuencialellechu100% (4)
- Prac 27Dokumen7 halamanPrac 27Yall GlezBelum ada peringkat
- Láser LíquidoDokumen28 halamanLáser LíquidoBonitzuZTBelum ada peringkat
- Contador asincrónico de 4 bits con FF tipo JKDokumen8 halamanContador asincrónico de 4 bits con FF tipo JKBrayan Coyuri LopezBelum ada peringkat
- Acero xw10Dokumen6 halamanAcero xw10Orlando CellanBelum ada peringkat
- Practica de CompensadoresDokumen6 halamanPractica de CompensadoresSalvador Soria SalgadoBelum ada peringkat
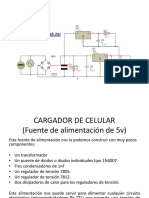
- Cargador de CelularDokumen10 halamanCargador de CelularDiego PérezBelum ada peringkat
- Tarea 2 - Buck Bost - Miguel ToroDokumen4 halamanTarea 2 - Buck Bost - Miguel ToroMiguel ToroBelum ada peringkat
- Rectificador A Diodos Con Linea Trifasica Conversor Ac A DC Grupo 6Dokumen24 halamanRectificador A Diodos Con Linea Trifasica Conversor Ac A DC Grupo 6David Ajhuacho Inca0% (1)
- Criterio de Nyquist MejoradoDokumen24 halamanCriterio de Nyquist MejoradorambetsBelum ada peringkat
- Criterio de Nyquist para determinar la estabilidad de un sistema en lazo cerradoDokumen8 halamanCriterio de Nyquist para determinar la estabilidad de un sistema en lazo cerradoFATIMA MARGARITA LOPEZ MAGANABelum ada peringkat
- Criterio de Estabilidad de NyquistDokumen6 halamanCriterio de Estabilidad de NyquistLuis CoronadoBelum ada peringkat
- Criterio de Estabilidad de NyquistDokumen4 halamanCriterio de Estabilidad de NyquistReyna Sofia Vilca ApazaBelum ada peringkat
- Tarea 13 Elaboracion Presentacion Power PointDokumen16 halamanTarea 13 Elaboracion Presentacion Power PointBERNABE MARTINEZ ESCALONABelum ada peringkat
- Turbina TubularDokumen9 halamanTurbina TubularJose Lezama PalominoBelum ada peringkat
- Capitulo 8 Fundaciones DirectasDokumen22 halamanCapitulo 8 Fundaciones DirectasLuciano Nervi100% (1)
- Diagrama de Control y Diagrama de PotenciaDokumen20 halamanDiagrama de Control y Diagrama de PotenciaMathiuk Hinostroza100% (3)
- TomacorrienteDokumen2 halamanTomacorriente800energia100% (1)
- Capitulo 2Dokumen41 halamanCapitulo 2Adrian MarquezBelum ada peringkat
- MaquinariasDokumen26 halamanMaquinariasBecerra Hernandez Ana JuliaBelum ada peringkat
- Ejercicios de TermodinamicaDokumen3 halamanEjercicios de TermodinamicaDobe Hernan YepezBelum ada peringkat
- Deflexión Transversa de Materiales Alternativos A Base de Polímeros para La Aplicación de Base de DentaduraDokumen23 halamanDeflexión Transversa de Materiales Alternativos A Base de Polímeros para La Aplicación de Base de DentaduraDianithaGarciaBelum ada peringkat
- Vibraciones Mecanicas Trabajo n1Dokumen11 halamanVibraciones Mecanicas Trabajo n1lepkerBelum ada peringkat
- Aska - 926 Informe TermiandoDokumen3 halamanAska - 926 Informe TermiandoFrancisca Ocares BestardBelum ada peringkat
- Practica 6 Electricos 2Dokumen9 halamanPractica 6 Electricos 2Bruno BarredaBelum ada peringkat
- Check list-SPDCDokumen8 halamanCheck list-SPDCCesar Antonio Verdugo FaundezBelum ada peringkat
- Termodinámica Aplicada Apuntes LemusDokumen40 halamanTermodinámica Aplicada Apuntes LemusJose Luis100% (1)
- InformeDokumen8 halamanInformePatricio Enrique Rubilar JaraBelum ada peringkat
- Sesión 5 Aplicaciones en Cromatografía InstrumentalDokumen8 halamanSesión 5 Aplicaciones en Cromatografía InstrumentalClaudia100% (1)
- Ejercicios DinámicaDokumen11 halamanEjercicios Dinámicajmgbp2002Belum ada peringkat
- Compuestos AromaticosDokumen50 halamanCompuestos Aromaticoseuaa_9201100% (6)
- Cálculo de curvas de remanso en canales abiertos usando ecuaciones de energía y ManningDokumen5 halamanCálculo de curvas de remanso en canales abiertos usando ecuaciones de energía y ManningAnonymous tboivk2RBelum ada peringkat
- Fq4esot3 - Cinematica EXELENTEDokumen0 halamanFq4esot3 - Cinematica EXELENTEfrancoyfisicaBelum ada peringkat
- 08 Herramientas Direccionales y Métodos de DeflexiónDokumen60 halaman08 Herramientas Direccionales y Métodos de DeflexiónRojasEduardo100% (3)
- Componentes de Turbina VaporDokumen4 halamanComponentes de Turbina VaporAndres AriasBelum ada peringkat
- 014435.564 Manual NORBAR USM-3 PDFDokumen64 halaman014435.564 Manual NORBAR USM-3 PDFMario Perez AmbrosioBelum ada peringkat
- Informe Sulfato de CobreDokumen10 halamanInforme Sulfato de CobreShary Alejandra Gómez100% (1)
- Laboratorio 2Dokumen7 halamanLaboratorio 2sebastian arboleda ramirezBelum ada peringkat
- Clase 8 22-05-18I Diagrama de Fe-CDokumen18 halamanClase 8 22-05-18I Diagrama de Fe-CGOmez Ztifler'z HallBelum ada peringkat
- Textura Cata QuesosDokumen24 halamanTextura Cata QuesosCAPRINOS BAJA CALIFORNIA SUR, MEXICO100% (1)
- Informe N°14 AdsorciónDokumen25 halamanInforme N°14 AdsorciónLuis AbantoBelum ada peringkat
- Laboratorio 1 - Errores en Mediciones Zegarra Ochoa Jose AnthonyDokumen14 halamanLaboratorio 1 - Errores en Mediciones Zegarra Ochoa Jose AnthonyZegarra albertoBelum ada peringkat
- Atenuación en línea de transmisiónDokumen10 halamanAtenuación en línea de transmisiónDaniel Gomez MartinezBelum ada peringkat