Anda mungkin juga menyukai
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Everything You Need to Know About DC DrivesDokumen10 halamanEverything You Need to Know About DC DrivesSuyog ShingareBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Piaggio MP3 400 I.E Service Station Manual-10Dokumen20 halamanPiaggio MP3 400 I.E Service Station Manual-10H. KeithBelum ada peringkat
- LT Cable ScheduleDokumen3 halamanLT Cable ScheduleSaquib Khan100% (2)
- Factorial: Problem Code: FCTRLDokumen4 halamanFactorial: Problem Code: FCTRLNitish KumarBelum ada peringkat
- 8085 VerilogDokumen21 halaman8085 VerilogvatsalyatBelum ada peringkat
- Cryogenic Ball Valves: Installation, Operation and Maintenance InstructionsDokumen8 halamanCryogenic Ball Valves: Installation, Operation and Maintenance InstructionsDv Maria PradhikaBelum ada peringkat
- Reentry Vehicle DesignDokumen21 halamanReentry Vehicle DesignNitish KumarBelum ada peringkat
- 7 Gajanan Bhat UTDokumen36 halaman7 Gajanan Bhat UTJose HenriqueBelum ada peringkat
- 7 Gajanan Bhat UTDokumen36 halaman7 Gajanan Bhat UTJose HenriqueBelum ada peringkat
- Aswc2014 Composite Press Forming Textile Fabric PDFDokumen24 halamanAswc2014 Composite Press Forming Textile Fabric PDFNitish KumarBelum ada peringkat
- Jiger Jain PDFDokumen16 halamanJiger Jain PDFNitish KumarBelum ada peringkat
- Avd Report FinalDokumen34 halamanAvd Report Finaljanmejay26Belum ada peringkat
- Digital Bicycle Speedometer Using DynamoDokumen13 halamanDigital Bicycle Speedometer Using DynamoNitish KumarBelum ada peringkat
- MATLAB Image Processing PDFDokumen8 halamanMATLAB Image Processing PDFNitish KumarBelum ada peringkat
- Mars Entry Mission Design and AnalysisDokumen15 halamanMars Entry Mission Design and AnalysisNitish KumarBelum ada peringkat
- Twin PrimesDokumen3 halamanTwin PrimesNitish KumarBelum ada peringkat
- Assignment 1 FEMDokumen3 halamanAssignment 1 FEMNitish KumarBelum ada peringkat
- Reentry Vehicle DesignDokumen11 halamanReentry Vehicle DesignNitish KumarBelum ada peringkat
- CFD Assignment 1Dokumen15 halamanCFD Assignment 1Nitish KumarBelum ada peringkat
- Mission DesignDokumen7 halamanMission DesignNitish KumarBelum ada peringkat
- Program For Bubble Sorting of 1D ArrayDokumen1 halamanProgram For Bubble Sorting of 1D ArrayNitish KumarBelum ada peringkat
- Program For GCD of N NumbersDokumen2 halamanProgram For GCD of N NumbersNitish KumarBelum ada peringkat
- Design and Fabrication of Staircase Climbing WheelchairDokumen11 halamanDesign and Fabrication of Staircase Climbing WheelchairNitish KumarBelum ada peringkat
- External Interrupts On The ATMEGADokumen3 halamanExternal Interrupts On The ATMEGANitish KumarBelum ada peringkat
- To Find Factorial of Any Number Which Number of Digits Is Less Than 1000Dokumen4 halamanTo Find Factorial of Any Number Which Number of Digits Is Less Than 1000Nitish KumarBelum ada peringkat
- Lost Primes: All Submissions For This Problem Are AvailableDokumen5 halamanLost Primes: All Submissions For This Problem Are AvailableNitish KumarBelum ada peringkat
- Prime GeneratorDokumen3 halamanPrime GeneratorNitish KumarBelum ada peringkat
- String PermutationDokumen2 halamanString PermutationNitish KumarBelum ada peringkat
- Chip ItDokumen3 halamanChip ItNitish KumarBelum ada peringkat
- M32 BoardDokumen1 halamanM32 BoardNitish KumarBelum ada peringkat
- Eight Queens ProblemDokumen3 halamanEight Queens ProblemNitish KumarBelum ada peringkat
- Common Anode LEDDokumen1 halamanCommon Anode LEDNitish KumarBelum ada peringkat
- 4x4 Keypad MatrixDokumen1 halaman4x4 Keypad MatrixNitish KumarBelum ada peringkat
- Common Anode LEDDokumen1 halamanCommon Anode LEDNitish KumarBelum ada peringkat
- Yamaha RX V365 Owners ManualDokumen1 halamanYamaha RX V365 Owners ManualandreiBelum ada peringkat
- Valvulas Introduccion (Ingles)Dokumen21 halamanValvulas Introduccion (Ingles)Luis VilcañaupaBelum ada peringkat
- Filter overview and capacities for John Deere 7030 tractorsDokumen2 halamanFilter overview and capacities for John Deere 7030 tractorsАндрій ДзядевичBelum ada peringkat
- AOPEN Embedded PC BrochureDokumen12 halamanAOPEN Embedded PC BrochurepaulaBelum ada peringkat
- Sun SPARC Enterprise T5120 and T5220Dokumen55 halamanSun SPARC Enterprise T5120 and T5220Abhimanyu BiswasBelum ada peringkat
- S40 Series: Microprocessor-Based Miniature SensorsDokumen4 halamanS40 Series: Microprocessor-Based Miniature Sensorsrogerio barbosa comamBelum ada peringkat
- Safety Equipment Inventory ListingDokumen311 halamanSafety Equipment Inventory Listinggardamas tunggal primaBelum ada peringkat
- Sensor de Presion 522Dokumen2 halamanSensor de Presion 522Israel SamaniegoBelum ada peringkat
- Wireless Design For Power Theft Monitoring: Parul Ranjan, Namita Mehra, Prof. T.A. More, Shripad BokandDokumen4 halamanWireless Design For Power Theft Monitoring: Parul Ranjan, Namita Mehra, Prof. T.A. More, Shripad BokandAyshwar Venkatesh100% (1)
- Motor Trifasico Ms6324 018kw TechtopDokumen1 halamanMotor Trifasico Ms6324 018kw TechtopVivianne catalina Muñoz roaBelum ada peringkat
- WEG Hydrogenerators Gh20 14824113 Manual EnglishDokumen51 halamanWEG Hydrogenerators Gh20 14824113 Manual EnglishGuilherme RosaBelum ada peringkat
- 1 1 1 A B SimplemachinesinclinedplanewedgescrewDokumen19 halaman1 1 1 A B Simplemachinesinclinedplanewedgescrewapi-366546603Belum ada peringkat
- Mfge09l 1Dokumen6 halamanMfge09l 1Joseph ZamoraBelum ada peringkat
- Datasheet PDFDokumen5 halamanDatasheet PDFFIMBelum ada peringkat
- Schneider PLC Module Bmxdra1605 PDFDokumen4 halamanSchneider PLC Module Bmxdra1605 PDFjoapmeBelum ada peringkat
- Operator Protective Guards level 2Dokumen7 halamanOperator Protective Guards level 2Irfan SaeedBelum ada peringkat
- Daily LPG Cylinder Leakage TestDokumen2 halamanDaily LPG Cylinder Leakage TestLwandziso DlaminiBelum ada peringkat
- Start: Training Pathway: E-011-1 Industrial Electronic Junior Technician - EquipmentDokumen3 halamanStart: Training Pathway: E-011-1 Industrial Electronic Junior Technician - EquipmentzamriabdBelum ada peringkat
- BC 300 ManualDokumen24 halamanBC 300 ManualFreddyo59100% (1)
- Clevo D610S D620S D630S NotebookDokumen91 halamanClevo D610S D620S D630S NotebookCaptain444Belum ada peringkat
- Manual 4MDokumen118 halamanManual 4MJoão Manoel Bruna GarciaBelum ada peringkat
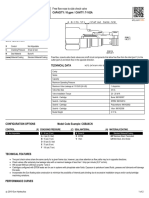
- Free-flow nose-to-side check valve technical detailsDokumen2 halamanFree-flow nose-to-side check valve technical detailssnsnagarajanBelum ada peringkat
- TBM meeting records HSE issuesDokumen1 halamanTBM meeting records HSE issuesilham taufik hsseBelum ada peringkat
- MK IV Horizontal Sliding Door Replacement Parts GuideDokumen48 halamanMK IV Horizontal Sliding Door Replacement Parts GuidevankarpBelum ada peringkat
- Postflood Restartprocedure HOFFMAN LAMSONDokumen1 halamanPostflood Restartprocedure HOFFMAN LAMSONLuis Fernando BravoBelum ada peringkat