Anda mungkin juga menyukai
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Technical Data Sheet CPVC: (Chlorinated Polyvinyl Chloride)Dokumen1 halamanTechnical Data Sheet CPVC: (Chlorinated Polyvinyl Chloride)Nam NguyenBelum ada peringkat
- Thickness Calucaltion 200 Bar - Is 7285Dokumen1 halamanThickness Calucaltion 200 Bar - Is 7285vijaygalaxyBelum ada peringkat
- SOM Cycle Test 1 Answer KeyDokumen2 halamanSOM Cycle Test 1 Answer KeySelvaraj GBelum ada peringkat
- Engineering Physics (PH22101) : ObjectivesDokumen59 halamanEngineering Physics (PH22101) : ObjectivesSK crushBelum ada peringkat
- X-Ray Diffraction (XRD)Dokumen39 halamanX-Ray Diffraction (XRD)Shaba ShaikhBelum ada peringkat
- Mechanics of Deformable Bodies: Poisson's Ratio and DeformationDokumen14 halamanMechanics of Deformable Bodies: Poisson's Ratio and DeformationJake CanlasBelum ada peringkat
- Lesson 2 - Bond Polarity and Molecular GeometryDokumen46 halamanLesson 2 - Bond Polarity and Molecular GeometryFreshieeBelum ada peringkat
- Effects of swelling and non-swelling clays on flotation performanceDokumen8 halamanEffects of swelling and non-swelling clays on flotation performanceAndrea Rivera YucraBelum ada peringkat
- Phy2 11 - 12 Q3 0301 FDDokumen21 halamanPhy2 11 - 12 Q3 0301 FDSTEM1 LOPEZBelum ada peringkat
- Schneider Electric - Easy-Harmony-XA2 - XA2ED41Dokumen6 halamanSchneider Electric - Easy-Harmony-XA2 - XA2ED41Trung Trinh BaoBelum ada peringkat
- Pirelli Angel Scooter R-2 PDFDokumen1 halamanPirelli Angel Scooter R-2 PDFlely dwiBelum ada peringkat
- Lecture Notes-Earthquakes and Seismic WavesDokumen43 halamanLecture Notes-Earthquakes and Seismic WavestufdaawgBelum ada peringkat
- Zeroth Law Thermodynamics Basis Temperature MeasurementDokumen16 halamanZeroth Law Thermodynamics Basis Temperature MeasurementSatyendra VishwakarmaBelum ada peringkat
- Is 7906 1 1997Dokumen37 halamanIs 7906 1 1997paragbholeBelum ada peringkat
- Unlock-Durcomet 100 (CD-4MCu)Dokumen8 halamanUnlock-Durcomet 100 (CD-4MCu)Dimas Pratama PutraBelum ada peringkat
- Solutions Chapter 1Dokumen16 halamanSolutions Chapter 1BluaBelum ada peringkat
- Large Amplitude Settlements of Oil Storage TanksDokumen5 halamanLarge Amplitude Settlements of Oil Storage TanksamokhtaBelum ada peringkat
- RLST GI Sheet CatalogDokumen3 halamanRLST GI Sheet CatalogRavish JayasekaraBelum ada peringkat
- Problem 6: Answer: 138.24kN, 157.93kN, 304kNDokumen1 halamanProblem 6: Answer: 138.24kN, 157.93kN, 304kNMarvin Carl GranadaBelum ada peringkat
- Pi BC3004 18-03 enDokumen1 halamanPi BC3004 18-03 enAlexandre RogerBelum ada peringkat
- Li 2008 Nanotechnology 19 345606Dokumen6 halamanLi 2008 Nanotechnology 19 345606mayankbishtBelum ada peringkat
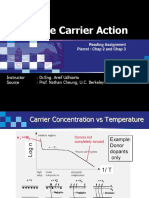
- Mobile Carrier Action: Instructor: DR - Eng. Arief Udhiarto Source: Prof. Nathan Cheung, U.C. BerkeleyDokumen23 halamanMobile Carrier Action: Instructor: DR - Eng. Arief Udhiarto Source: Prof. Nathan Cheung, U.C. BerkeleyMess YeahBelum ada peringkat
- Bolt and Nut Hardness TesterDokumen15 halamanBolt and Nut Hardness TestermosdnsBelum ada peringkat
- PRACTICE QUESTIONS Unit 4, 5 and 6Dokumen5 halamanPRACTICE QUESTIONS Unit 4, 5 and 6Samrudhi PatilBelum ada peringkat
- The Deposition Process: An Overview of Thin Film Deposition TechniquesDokumen43 halamanThe Deposition Process: An Overview of Thin Film Deposition Techniquesvijayamkulkarni86Belum ada peringkat
- Flyer Adsorption Week 2023 1Dokumen2 halamanFlyer Adsorption Week 2023 1ElyKarlaBelum ada peringkat
- Experimental & Theoretical Stress Analysis of Cantilever BeamDokumen12 halamanExperimental & Theoretical Stress Analysis of Cantilever BeammatthewBelum ada peringkat
- Fiberglass TerminologyDokumen13 halamanFiberglass Terminologystang2001gurlBelum ada peringkat
- Fabrication and Study of Mechanical Properties of Orange PEEL Reinforced Polymer CompositeDokumen6 halamanFabrication and Study of Mechanical Properties of Orange PEEL Reinforced Polymer CompositeMakeshBelum ada peringkat
- Glycol Modified PETDokumen11 halamanGlycol Modified PETNg WeeTzeBelum ada peringkat