Anda mungkin juga menyukai
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Entitlement Cure SampleDokumen34 halamanEntitlement Cure SampleZondervan100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- A Critical Appreciation of Ode To NightingaleDokumen3 halamanA Critical Appreciation of Ode To NightingaleBaloch Karawan100% (2)
- Care of Clients With Problems in OxygenationDokumen5 halamanCare of Clients With Problems in OxygenationSkyla FiestaBelum ada peringkat
- Lesson 1 - Intro To Highway EngineeringDokumen15 halamanLesson 1 - Intro To Highway EngineeringSaoirseBelum ada peringkat
- Management of Preterm LaborDokumen2 halamanManagement of Preterm LaborpolygoneBelum ada peringkat
- Compartment SyndromeDokumen14 halamanCompartment SyndromedokteraanBelum ada peringkat
- Latest Low NOx Combustion TechnologyDokumen7 halamanLatest Low NOx Combustion Technology95113309Belum ada peringkat
- Water Leak Sample ReportDokumen26 halamanWater Leak Sample ReportOmprakash MukherjeeBelum ada peringkat
- 32035Dokumen23 halaman32035Omprakash MukherjeeBelum ada peringkat
- Tabela Emisivnosti Materijala PDFDokumen3 halamanTabela Emisivnosti Materijala PDFdface_031Belum ada peringkat
- T820325 enDokumen68 halamanT820325 enFrancisco Alejandro Celma CarrilloBelum ada peringkat
- FLIR T620 25° (Incl. Wi-Fi)Dokumen16 halamanFLIR T620 25° (Incl. Wi-Fi)Omprakash MukherjeeBelum ada peringkat
- ITS Brochure 6.h25.13 AEROTECS WebDokumen2 halamanITS Brochure 6.h25.13 AEROTECS WebOmprakash MukherjeeBelum ada peringkat
- Lecture 02Dokumen1 halamanLecture 02Omprakash MukherjeeBelum ada peringkat
- Introduction FEDokumen84 halamanIntroduction FEM Praveen KumarBelum ada peringkat
- Structural Analysis - Iii 6111 C: B.Tech Civil Engineering SyllabusDokumen5 halamanStructural Analysis - Iii 6111 C: B.Tech Civil Engineering SyllabusOmprakash MukherjeeBelum ada peringkat
- Brody2012 PDFDokumen13 halamanBrody2012 PDFfrancisca caceresBelum ada peringkat
- Solo ParentsDokumen1 halamanSolo ParentsOZ CincoBelum ada peringkat
- Ds0h Ufaa68 ProposalDokumen11 halamanDs0h Ufaa68 Proposaledward baskaraBelum ada peringkat
- Turning Risk Into ResultsDokumen14 halamanTurning Risk Into Resultsririschristin_171952Belum ada peringkat
- 2 Dawn150Dokumen109 halaman2 Dawn150kirubelBelum ada peringkat
- Tamilnadu Shop and Establishment ActDokumen6 halamanTamilnadu Shop and Establishment ActShiny VargheesBelum ada peringkat
- Thanks For Visiting Our Page!: Hi Doc!Dokumen15 halamanThanks For Visiting Our Page!: Hi Doc!bey luBelum ada peringkat
- Leather & Polymer - Lec01.2k11Dokumen11 halamanLeather & Polymer - Lec01.2k11Anik AlamBelum ada peringkat
- 2133 Rla RlvaDokumen2 halaman2133 Rla RlvaAgung SubangunBelum ada peringkat
- Heat Transfer ExampleDokumen4 halamanHeat Transfer Examplekero_the_heroBelum ada peringkat
- Principles of Health Management: Mokhlis Al Adham Pharmacist, MPHDokumen26 halamanPrinciples of Health Management: Mokhlis Al Adham Pharmacist, MPHYantoBelum ada peringkat
- MSDS - Granular Silica GelDokumen3 halamanMSDS - Granular Silica GelLailal HaqimBelum ada peringkat
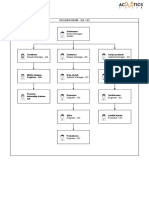
- Organogram - Qa / QC: Srinivasan SrinivasanDokumen4 halamanOrganogram - Qa / QC: Srinivasan SrinivasanGowtham VenkatBelum ada peringkat
- The Case - Lijjat PapadDokumen16 halamanThe Case - Lijjat Papadganesh572Belum ada peringkat
- Epo-Fix Plus: High-Performance Epoxy Chemical AnchorDokumen3 halamanEpo-Fix Plus: High-Performance Epoxy Chemical Anchormilivoj ilibasicBelum ada peringkat
- Syllabus For Bachelor of Physiotherapy (BPT) Academic ProgrammeDokumen36 halamanSyllabus For Bachelor of Physiotherapy (BPT) Academic ProgrammevikasmaeBelum ada peringkat
- Riber 6-s1 SP s17-097 336-344Dokumen9 halamanRiber 6-s1 SP s17-097 336-344ᎷᏒ'ᏴᎬᎪᏚᎢ ᎷᏒ'ᏴᎬᎪᏚᎢBelum ada peringkat
- 2022-Brochure Neonatal PiccDokumen4 halaman2022-Brochure Neonatal PiccNAIYA BHAVSARBelum ada peringkat
- SanMilan Inigo Cycling Physiology and Physiological TestingDokumen67 halamanSanMilan Inigo Cycling Physiology and Physiological Testingjesus.clemente.90Belum ada peringkat
- Dr. Sajjad Hussain Sumrra Isomerism (CHEM-305) Inorganic Chemistry-IIDokumen48 halamanDr. Sajjad Hussain Sumrra Isomerism (CHEM-305) Inorganic Chemistry-IITanya DilshadBelum ada peringkat
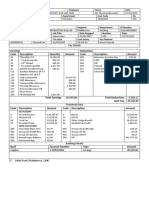
- Pay Details: Earnings Deductions Code Description Quantity Amount Code Description AmountDokumen1 halamanPay Details: Earnings Deductions Code Description Quantity Amount Code Description AmountVee-kay Vicky KatekaniBelum ada peringkat
- Village Survey Form For Project Gaon-Setu (Village Questionnaire)Dokumen4 halamanVillage Survey Form For Project Gaon-Setu (Village Questionnaire)Yash Kotadiya100% (2)
- Employment Offer: 1. Employer InformationDokumen2 halamanEmployment Offer: 1. Employer InformationnavidBelum ada peringkat