IIT Gandhinagar, Dept.
of Mechanical Engineering
ME312: Kinematics and Dynamics of Machines Laboratory (Structured Laboratory Component) V1.0/HPM/ Mar 2012
KDM-1.3: FREE AND FORCED VIBRATIONS
1. AIM: The aim of this experiment is to allow you to experiment with vibrations in mechanical elements. 2. APPARATUS: The forced and free vibrations equipment used for this study is shown in Figure 1, and its various components are marked in Figure 2.
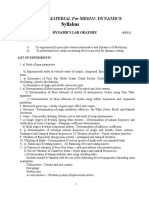
Figure 1. Free and Forced Vibrations Apparatus
The Free and Forced Vibratiosn Apparatus permits study of a wide range of topics related to vibrations. The experimentation set-ups are mounted on an aluminium sectional frame. The oscillator
consists of a beam (part (2) in Figure 2), which can pivot at one end and is suspended by a helical spring (part (6) in Figure 2) at the other end. The beam has a hole grid that permits the attachment of springs, exciter (part (1) in Figure 2), damper (part (3) in Figure 2) in a variety of configurations. The apparatus also consists of an inductive proximity sensor that can be connected to a computer for measuring and viewing the vibrations of the beam. The apparatus also comes with an analog plotter (part (5) in Figure 2) that serves two purposes, that is, to record the vibration data and also provide a means for generating Coulomb friction (due to friction between the stylus and the paper). Finally, the excited control unit (part (4) in Figure 2) can be used to switch on the imbalance exciter and gradually change the frequency of excitation for forced vibration experiments.
IIT Gandhinagar, Dept. of Mechanical Engineering
ME312: Kinematics and Dynamics of Machines Laboratory (Structured Laboratory Component) V1.0/HPM/ Mar 2012
Figure 2: Components of Free and Forced Vibrations Apparatus
3. PROCEDURE: The apparatus is already assembled and there is minimal setup procedure. Attachment of springs and dampers are easily changed by attaching these components at the desired location on the hole grid and tightening the attachment nut. For forced vibration experiments, the speed control knob is to be gradually increased to increase the speed of unbalance forcer and the vibrations of the unit are to be observed through the software installed on the computer connected to the system. Data recording procedure: Currently, capability to save the sensor data is not available, so it is suggested that for each experiment, you cature a screenshot of the plots displayed on the computer screen (using Alt+PrintScreen) and paste it on to a word document for future calculations and reference. 4. THEORY: The relevant course material pertaining to vibrations applies for this structured experiment and you are expected to refer to these lecture material, textbook and assigned resources for the course ME304. 5. EXPERIMENTAL TASKS ASSIGNED USING THE WHIRLING OF SHAFTS APPARATUS (a) Free vibrations - spring 1 Ensure that spring 1 is attached and that the damper is not attached to the oscillating bar. Deflect the end of the beam by hand and release it. Observe the vibrations and caputre the time history of oscillations using Alt+PrintScreen. Calculate the natural frequency of
IIT Gandhinagar, Dept. of Mechanical Engineering
ME312: Kinematics and Dynamics of Machines Laboratory (Structured Laboratory Component) V1.0/HPM/ Mar 2012
oscillations from the captured graphs. Warning: During these oscillations, take care that the bar does not contact the sensor. Repeat the above step two more times with different initial amplitude. Do you obtain the same natural frequency of oscillations? Attach the dashpot and repreat the above steps to set up free vibrations and calculate fequency of oscillations. Do you get the same frequency as without damping? Comment on any difference if any. Also comment on whether the damping ratio can be calculated from the observed oscillations. Detach the dashpot from the bar and attach a stylus (pen) to generate coulomb friction due to contact between pen and paper. Again repeat the steps similar to previous steps to calculate frequency of oscillations. Do you obtain the same frequency as without coulomb friction? Comment on any differences if any. (b) Free vibrations - spring 2 Remove spring 1 and attach spring 2 to the bar. Repeat the steps above for the five cases mentioned above (i-iii)with three different initial amplitudes (with no damping or friction), (iv) with the dashpot attached, and finally (v) with coulomb friction (pen attached). Comment on differences in results between both springs. Can you estimate from the results which one is a stiffer spring? Justify your answer. (c) Forced vibrations Swith on the mass-imbalance exciter. Gradually increase the frequency of excitation from 0 to 4 hertz. At 4 hertz forcing frequency, note down the amplitude of vibrations. Gradually increase frequency to 5 Hz and again note down the amplitude of oscillations. Repeat this by gradually increasing frequency to 6 Hz, 7 Hz, 7.5 Hz, 8 Hz, 8.4 Hz. Warning: DO NOT go above 8.5 Hz when dashpot is not attached to the bar. This may cause serious damage to the apparatus. Take extreme care when going above 8 Hz and increase the frequency very gradually. Fnally plot amplitude of oscillations versus frequency of oscillations. Can you roughly estimate the natural frequency of this oscillating system from this plot? Attach the stylus to add Coulomb damping, repeat the same steps above, noting down readings at 4, 5, 6, 7, 7.5, 8, 8.4 Hz, respectively. Again, generate an amplitude versus frequence plot and show both the plots (no damping and with Coulomb friction) on the same chart. Comment on any differences.
REFERENCES 1. Robert L. Norton, Kinematics and Dynamics of Machinery, SI Edition,2009, McGraw Hill ,ISBN: 0071278524, EAN: 9780071278522 2. Oleg Vinogradov, Fundamentals of Kinematics and Dynamics of Machines and Mechanisms,2000, CRC Press, ISBN: 0849302579,EAN: 9780849302572 3. S.S. Rao, Mechanical Vibrations, 4th Edition, Prentice-Hall, ISBN-13: 9780130489876, 2010 4. Uicker J.J., Pennock G.R. and Shigley J.E., Theory of Machines and Mechanisms, 3 Edition, 2005, Oxford University Press, New York, 5. Rattan S.S., Theory of Machines, 3 Edition, 2009, 5
rd th rd
Reprint 2010,Tata-McGraw Hill
IIT Gandhinagar, Dept. of Mechanical Engineering
ME312: Kinematics and Dynamics of Machines Laboratory (Structured Laboratory Component) V1.0/HPM/ Mar 2012
6. GUNT, Experiment Instructions: TM 155 Free and Forced Vibration Apparatus, Gutn- Hamburg Novermber 2011
IIT Gandhinagar, Dept. of Mechanical Engineering
ME312: Kinematics and Dynamics of Machines Laboratory
(Structured Laboratory Component) V1.0/HPM/ Mar 2012
Anda mungkin juga menyukai
- LAB 5 VibrationDokumen6 halamanLAB 5 Vibrationmohdiqbal930% (1)
- Staic ND Dynamic BalancingDokumen4 halamanStaic ND Dynamic BalancingShubhangi BansudeBelum ada peringkat
- Department of Mechatronics EngineeringDokumen9 halamanDepartment of Mechatronics EngineeringDibya joyBelum ada peringkat
- Forced and Free Vibration ProjectDokumen4 halamanForced and Free Vibration ProjectHarshdeep SinghBelum ada peringkat
- (MODUL) - Praktikum Modul 3Dokumen5 halaman(MODUL) - Praktikum Modul 3Rafi AkbarBelum ada peringkat
- Praktikum 2 Perawatan MS - Modul 3 - Bump TestDokumen5 halamanPraktikum 2 Perawatan MS - Modul 3 - Bump Test01CaUKM Zhaffran AsyrafBelum ada peringkat
- Expt 4 Frequency Response Curves of Single Degree Freedom SystemDokumen4 halamanExpt 4 Frequency Response Curves of Single Degree Freedom SystemRithwik pawarBelum ada peringkat
- Vibrating Beam Lab ReportDokumen13 halamanVibrating Beam Lab ReportSteven Giffney100% (1)
- Vibration - Prac - Sheet - 2023s1Dokumen6 halamanVibration - Prac - Sheet - 2023s1StevenBelum ada peringkat
- Lab 9 - Undamped Vibration Absorber - v3Dokumen14 halamanLab 9 - Undamped Vibration Absorber - v3sairafiBelum ada peringkat
- Undamped Vibration Absorber - v3Dokumen14 halamanUndamped Vibration Absorber - v3prem_chaurasiyaaBelum ada peringkat
- Bo 0409Dokumen8 halamanBo 0409eng13Belum ada peringkat
- Forced Vibration Experiment - Resonance of Spring PDFDokumen121 halamanForced Vibration Experiment - Resonance of Spring PDFasyraaf md diwi100% (2)
- Aer403 Lab Manual Rev1.3Dokumen34 halamanAer403 Lab Manual Rev1.3Urshia Likes CookiesBelum ada peringkat
- Dynamic Analysis Large Vibrating ScreenDokumen4 halamanDynamic Analysis Large Vibrating ScreenZiggy GregoryBelum ada peringkat
- Project Report Mech-VibDokumen19 halamanProject Report Mech-VibbabugaruBelum ada peringkat
- ME3112-1 Lab Vibration MeasurementDokumen8 halamanME3112-1 Lab Vibration MeasurementLinShaodunBelum ada peringkat
- Lab 2 - Forced Vibration Sem II 2019 - 2020 PDFDokumen8 halamanLab 2 - Forced Vibration Sem II 2019 - 2020 PDFKhairul IkhwanBelum ada peringkat
- Noise and Vibration QBDokumen9 halamanNoise and Vibration QBOmkar DinganeBelum ada peringkat
- Vibrations of Power Plant Machines: A Guide for Recognition of Problems and TroubleshootingDari EverandVibrations of Power Plant Machines: A Guide for Recognition of Problems and TroubleshootingBelum ada peringkat
- Vibration ISO Level 1 Module 2Dokumen33 halamanVibration ISO Level 1 Module 2Shambhu Poddar100% (1)
- TOPIC 1: (Vibration Measurement) : Vibration Measurement, From The Word Itself Measures Vibration. "Vibration MeasurementDokumen5 halamanTOPIC 1: (Vibration Measurement) : Vibration Measurement, From The Word Itself Measures Vibration. "Vibration MeasurementShanks XDBelum ada peringkat
- My Practical ReportDokumen11 halamanMy Practical Reportironmyan18Belum ada peringkat
- Module 4Dokumen32 halamanModule 4ARJUN BEDI204005Belum ada peringkat
- Experimental Modal Analysis: (A Simple Non-Mathematical Presentation)Dokumen15 halamanExperimental Modal Analysis: (A Simple Non-Mathematical Presentation)maitoravi78100% (1)
- Phase MeasurementDokumen8 halamanPhase MeasurementEmir Nezirić100% (1)
- Physics 211 Experiment # 10 Measurement of Moment of Inertia ObjectiveDokumen7 halamanPhysics 211 Experiment # 10 Measurement of Moment of Inertia ObjectiveKhabi NadaBelum ada peringkat
- Vibration Application DataDokumen44 halamanVibration Application DataSaurabh PanditBelum ada peringkat
- What Is Random Vibration TestingDokumen4 halamanWhat Is Random Vibration TestingsaidmsrochaBelum ada peringkat
- Vibration Analysis OverviewDokumen7 halamanVibration Analysis OverviewVasile RaduBelum ada peringkat
- Unit5 SKKDokumen5 halamanUnit5 SKKC V CHANDRASHEKARABelum ada peringkat
- Experiment: Atwood Machine: ObjectivesDokumen4 halamanExperiment: Atwood Machine: ObjectivessygexBelum ada peringkat
- Damilano 1957Dokumen7 halamanDamilano 1957guido_damilanoBelum ada peringkat
- 10 30931-Jetas 853107-1486475Dokumen13 halaman10 30931-Jetas 853107-1486475Haf26Belum ada peringkat
- Vibration Analysis and Modelling of A Cantilever Beam: Mudassar Hassan CEP 2016-ME-71Dokumen13 halamanVibration Analysis and Modelling of A Cantilever Beam: Mudassar Hassan CEP 2016-ME-71Muhammad Hamza YasinBelum ada peringkat
- Detecting Bearing Faults, Part 2Dokumen2 halamanDetecting Bearing Faults, Part 2LuisSilvaBelum ada peringkat
- FurutaDokumen6 halamanFurutaHasy_pakiBelum ada peringkat
- Minimization of Chatter in Machining by The Use of Mobile Platform Technologies PDFDokumen6 halamanMinimization of Chatter in Machining by The Use of Mobile Platform Technologies PDFDenis SatriaBelum ada peringkat
- Exp 3+4Dokumen7 halamanExp 3+4abdul rehmanBelum ada peringkat
- Exp 3 Force Vibration (Finalized)Dokumen33 halamanExp 3 Force Vibration (Finalized)Fakhrur Razi67% (6)
- Basics of Vibration MonitoringDokumen14 halamanBasics of Vibration MonitoringsandystaysBelum ada peringkat
- Experimental Modal AnalysisDokumen11 halamanExperimental Modal Analysisrs0004Belum ada peringkat
- Oscillations Periodic Random Tuning Fork Reed Woodwind Instrument Harmonica LoudspeakerDokumen21 halamanOscillations Periodic Random Tuning Fork Reed Woodwind Instrument Harmonica LoudspeakerneenoonaaBelum ada peringkat
- 1.1. Cover 1.2. Table of Content 1.3. Chapter I (Basis of Theory)Dokumen4 halaman1.1. Cover 1.2. Table of Content 1.3. Chapter I (Basis of Theory)Andinata SitepuBelum ada peringkat
- Vibration Measurement PresentDokumen16 halamanVibration Measurement PresentIpui UPBelum ada peringkat
- Online Lab: Vibrating Strings: ObjectiveDokumen9 halamanOnline Lab: Vibrating Strings: ObjectiveEsteban Escalante CordobaBelum ada peringkat
- Pedotti2016 PDFDokumen6 halamanPedotti2016 PDFbekhouche nasreddineBelum ada peringkat
- Vibration Fundamentals and Training Laboratory Kit ModulesDokumen8 halamanVibration Fundamentals and Training Laboratory Kit Modulesdeekshayadavv4Belum ada peringkat
- 02 Unit II Vibration Nomograph Vibration Control 04 02 2017 Student and TeachersDokumen14 halaman02 Unit II Vibration Nomograph Vibration Control 04 02 2017 Student and TeachersKanishk Mehta100% (1)
- 2Dokumen3 halaman2AshokBelum ada peringkat
- Experiment 5Dokumen10 halamanExperiment 5Kushal DesardaBelum ada peringkat
- Dynamics of Machines Lab ManualDokumen56 halamanDynamics of Machines Lab ManualSavan PatelBelum ada peringkat
- Proceedings 02 01030Dokumen4 halamanProceedings 02 01030Sol BgBelum ada peringkat
- Standing Waves On A String: EquipmentDokumen8 halamanStanding Waves On A String: EquipmentYash JainBelum ada peringkat
- Static and Kinetic FrictionDokumen7 halamanStatic and Kinetic FrictionVikash SinghBelum ada peringkat
- Application of Wavelet Transform For Fault Diagnosis in Rotating MachineryDokumen6 halamanApplication of Wavelet Transform For Fault Diagnosis in Rotating MachinerySaeed JavdaniBelum ada peringkat
- Vibration (Flexible Structures)Dokumen14 halamanVibration (Flexible Structures)Faiz AhmedBelum ada peringkat
- Dom Lab ManuelDokumen56 halamanDom Lab ManuelMartin De Boras PragashBelum ada peringkat
- Spectral method for fatigue damage estimation with non-zero mean stressDari EverandSpectral method for fatigue damage estimation with non-zero mean stressBelum ada peringkat
- Relation Between Input and Output Voltage and Number of Turns in The Secondary Coil and Primary Coil of A Self Designed TransformerDokumen22 halamanRelation Between Input and Output Voltage and Number of Turns in The Secondary Coil and Primary Coil of A Self Designed TransformerBharati patil67% (18)
- Rename Using This Format: First Name of Section - Last Name, Given NameDokumen38 halamanRename Using This Format: First Name of Section - Last Name, Given NameChleyde DanguilanBelum ada peringkat
- PHY GravationDokumen10 halamanPHY GravationDaksh AgarwalBelum ada peringkat
- Jsu Fizik (4531) Pat Tingkatan 4 2017Dokumen14 halamanJsu Fizik (4531) Pat Tingkatan 4 2017lim chuan yang100% (1)
- PHYA10 - Physics I (Physical Sciences) Practical Worksheet #05Dokumen2 halamanPHYA10 - Physics I (Physical Sciences) Practical Worksheet #05Sabine MohamadBelum ada peringkat
- Ac Through CapacitorsDokumen5 halamanAc Through CapacitorsanandsupremeBelum ada peringkat
- 3 Work, Energy and PowerDokumen11 halaman3 Work, Energy and PowerAbdur RehmanBelum ada peringkat
- 132Kv Bus: Transformer 132/X KV Ynynd11Dokumen8 halaman132Kv Bus: Transformer 132/X KV Ynynd11karim_ouakliBelum ada peringkat
- Vocational Training ReportDokumen34 halamanVocational Training ReportAMARTYA GHOSHBelum ada peringkat
- Street Light Pole Voltage Drop Calculation (1.1.17)Dokumen9 halamanStreet Light Pole Voltage Drop Calculation (1.1.17)MigueldelaTorreBelum ada peringkat
- Y9 Physics Revision BookletDokumen20 halamanY9 Physics Revision BookletMaoga2013Belum ada peringkat
- AC MotorsDokumen48 halamanAC MotorsBrandon SookdeoBelum ada peringkat
- Sedimentologi - Transport Dan Pengendapan Sedimen Silisiklastik PDFDokumen45 halamanSedimentologi - Transport Dan Pengendapan Sedimen Silisiklastik PDFIndah LestariBelum ada peringkat
- Ee8006 Power Quality: Diploma, Anna Univ UG & PG CoursesDokumen2 halamanEe8006 Power Quality: Diploma, Anna Univ UG & PG CoursesBALAKRISHNANBelum ada peringkat
- Ce3201 L3 02 PDFDokumen28 halamanCe3201 L3 02 PDFKrisha Ann M. Mendoza100% (1)
- AT 17503 AEE Session 27Dokumen18 halamanAT 17503 AEE Session 27pavanraneBelum ada peringkat
- Principles of Fluid PressureDokumen4 halamanPrinciples of Fluid PressureMark John OgagBelum ada peringkat
- Acce Lerometer Theory & Design: Piezoelectri C Piezoresistive Ca PacitiveDokumen49 halamanAcce Lerometer Theory & Design: Piezoelectri C Piezoresistive Ca PacitiveAniruddha Patil0% (1)
- Di-Electric Properties of Textile MaterialDokumen17 halamanDi-Electric Properties of Textile Materialxhanto shahinulBelum ada peringkat
- Mil DTL 22759,16Dokumen1 halamanMil DTL 22759,16vkmsBelum ada peringkat
- Work and Energy Formula SheetDokumen3 halamanWork and Energy Formula SheetimkushofficialBelum ada peringkat
- GME Mech Questions 3 PDFDokumen109 halamanGME Mech Questions 3 PDFshakeer100% (1)
- Sci10 2nd Quarter Module 5 NO ANSWER KEYDokumen18 halamanSci10 2nd Quarter Module 5 NO ANSWER KEYjhunjhun zambrano100% (1)
- Year 10 Physical Sciences Week 3 and 4 AnswersDokumen12 halamanYear 10 Physical Sciences Week 3 and 4 AnswersDaniel XuBelum ada peringkat
- BME 271 SyllabusDokumen2 halamanBME 271 SyllabusKevin ZhangBelum ada peringkat
- Pressure Measurement AssignDokumen13 halamanPressure Measurement AssignMostafa Ahmed ZeinBelum ada peringkat
- Ferromagnetic Core Design Application Handbook PDFDokumen2 halamanFerromagnetic Core Design Application Handbook PDFDianna0% (1)
- Physical Sciences P1 Feb-March 2014 Memo Afr & EngDokumen20 halamanPhysical Sciences P1 Feb-March 2014 Memo Afr & Engbennie07Belum ada peringkat
- Acurate Modelling Power Cable Earth ImpedancesDokumen6 halamanAcurate Modelling Power Cable Earth ImpedancesJiraya15Belum ada peringkat